Моделирование механических систем с помощью пакета расширения SimMechanics
Автор: А. А. Махов
Источник: exponenta.ru
Автор: А. А. Махов
Источник: exponenta.ru
Ознакомиться пакетом расширения Simulink для моделирования механических систем SimMechanics. Освоить основные принципы создания моделей механических систем.
Как правило, моделирование объектов, помимо чисто научных целей может иметь и прикладное значение. Для проектирования и анализа механических систем (например, различных кинематических цепей) давно разработан специальный физико-математический аппарат.
SimMechanics - пакет расширения системы Simulink для Физического Моделирования. Его цель — техническое проектирование и моделирование механических систем (в рамках законов теоретической механики). SimMechanics позволяет моделировать поступа-тельное и вращательное движения в трех плоскостях. SimMechanics содержит набор инструментов для задания параметров звеньев (масса, моменты инерции, геометрические параметры), кинематических ограничений, локальных систем координат, способов задания и измерения движений. SimMechanics позволяет создавать модели механических систем по-добно другим Simulink-моделям в виде блок-схем. Встроенные дополнительные инстру-менты визуализации Simulink позволяют получить упрощенные изображения трехмерных механизмов как в статике, так и в динамике.
Любой механизм можно представить в виде совокупности звеньев и сопряжений. Например, звухзвенный физический маятник (см. рис. 1) представляет собой последова-тельное соединение следующих элементов:
Рис. 1 — Модель двухзвенного физического маятника
Simulink — модель такого механизма строится в аналогичной последовательности (см. рис. 2). Исходным элементом модели является звено Ground — земля. К нему присоединен элемент -— Revolute (т.е. сопряжение, позволяющее следующему звену лишь поворачиваться вокруг указанной оси - z). Далее следует непосредственно звено физического маятника Body. В качестве параметров этого звена необходимо указать массу тела, моменты инерции относительно главных центральных осей симметрии, а также координаты верхнего, нижнего конца звена и его центра масс. При этом координаты можно задавать как в глобальной системе координат (ГСК), так и в локальной системе координат (ЛСК) звена.
Аналогично, к первому звену посредством шарнирного соединения Revolute 1 присоединяется второе звено Body 1. Чтобы звенья спроектированного механизма начали движение необходимо либо добавить вынуждающую силу, либо задать начальные условия (например, начальное отклонение или сообщить начальную скорость). Для реализации последних используется блок Initial Condition.
Рис. 2,а
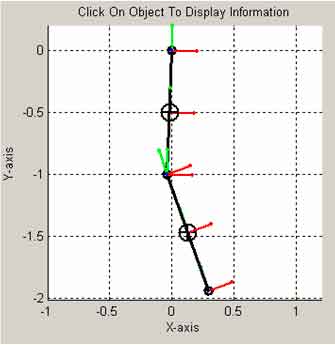
Рис. 2,б
Рис. 2 — Simulink-модель двухзвенного физического маятника (а) и моделью имитации движения (б)
На модели имитации отображаются звенья, колеблющиеся по законам классической механики (физики твердого тела). Там же отображаются локальные системы координат (ЛСК) звеньев.
Вопрос о выборе той или иной системы координат (СК) является очень важным. Правильный выбор СК значительно облегчает моделирование механизма и интерпретацию результатов.
При моделировании данного механизма использовались следующие СК (рис. 3).
Неподвижная глобальная система координат ГСК Global находится в точке сопряжения неподвижного звена с верхним звеном (коленом маятника). Задавать координаты точек верхнего звена маятника можно различными способами, в том числе, просто перечислив их значения в ГСК. Однако это не всегда удобно.
Верхний конец первого звена сопрягается с неподвижным звеном, и поэтому его координаты совпадают с началом ГСК. Его координаты действительно легко задать как Global [0, 0, 0]. Пусть звено имеет длину L и симметрию относительно ГЦОИ. Положение центра масс (ЦМ) звена удобно задавать уже не в ГСК а, в только что созданной ЛСК, где началом координат является верхний конец звена, т.е. в ЛСК CS1. Тогда координаты ЦМ можно задать как CS1 [0, -L/2, 0]. Аналогично нижний конец звена можно задать в ЛСК CS1 [0, -L, 0].
Несмотря на то, что начало ЛСК CS1 совпадает с началом ГСК Global, следует иметь в виду что ЛСК CS1 принадлежит верхнему звену, а значит, может поворачиваться относительно точки Global [0, 0, 0]. Глобальная же система координат ГСК Global всегда неподвижна. Ее начало может и не совпадать с точкой сопряжения неподвижного звена (тем более, когда неподвижных звеньев в механизме несколько).
Рис. 3 — Системы координат двухзвенного физического маятника
Помимо визуального наблюдения за свободными (при задании начальных условиях) или вынужденными (при наложении внешней силы) можно анализировать законы движения любой точки механизма. Для этого необходимо при задании координат звеньев указать координаты интересующей точки и к выходу соответствующего Simulink-блока подключить блок-датчик (Sensor).
Датчики могут регистрировать как угловые колебания, так и линейные, причем как перемещение, так и скорость и ускорение. Выход с датчика обычно выводят на блок осциллографа Scope (см. рис. 4).
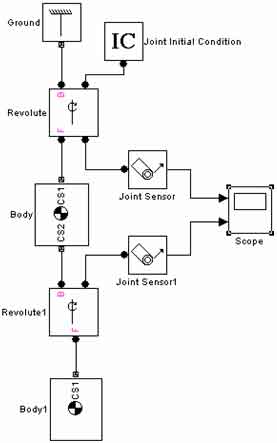
Рис. 4,а
Рис. 4,б
Рис. 4 — Модель двухзвенного физического маятника (а) для исследования законов движения его звеньев (б)
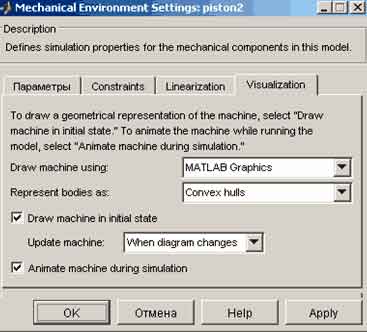
Рис. 5 — Задание параметров визуализации механизма
В данной лабораторной работе предлагается создать кинематическую модель кривошипно-шатунного механизма (рис. 6) и исследовать закон движения поршня.
Рис. 6 — Кривошипно-шатунный механизм
Масса — 1 кг;
Моменты инерции относительно ГЦОИ - [Ix, Iy, Iz] = [50, 50, 300] г/см2
Масса — 1,5 кг;
Моменты инерции относительно ГЦОИ - [Ix, Iy, Iz] = [80, 80, 500] г/см2
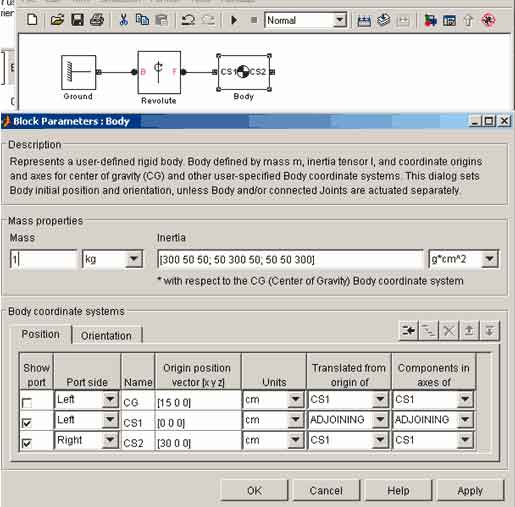
Рис. 7 — Параметры блока Body — при вводе данных о кривошипном звене
Примечание: ввод значений моментов инерции необходимо осуществлять в матричном виде [3 ? 3] (см. рис. 7).
φ(t)=φ0+ω0t+εt2/2; ω(t)=ω0+εt; ε(t)=ε=const
Реализуйте приведенные зависимости в виде отдельной подсистемы, например, как показано на рис. 8.
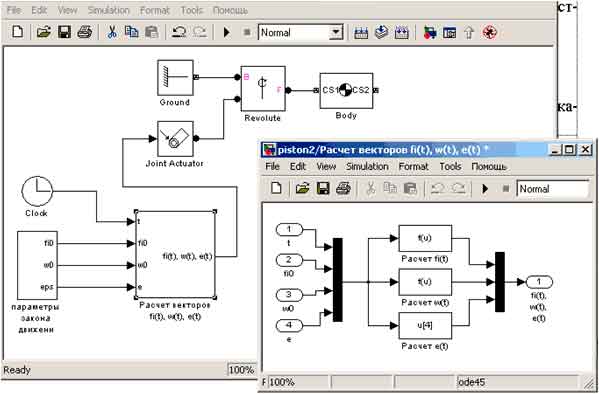
Рис. 8 — Добавление к модели привода и моделирование закона движения
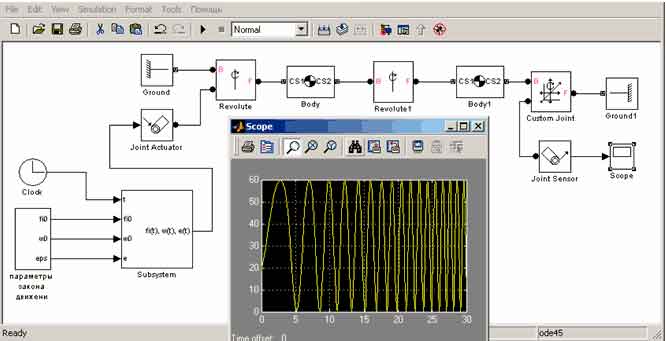
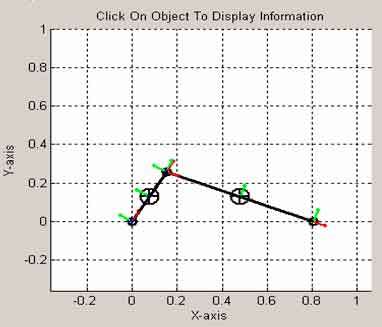
Рис. 9 — Окончательная модель кривошипно-шатунного механизма
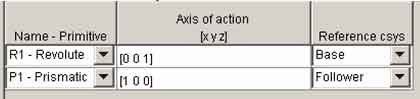
Рис. 10 — Механизм с одной степенью свободы
Размеры, указанные на эскизе механизма (рис. 10) условные. Определите, при какой длине правого кривошипа, ведущее левое звено не сможет совершить полный оборот.
Вариант модели механизма (без датчиков) представлен на рис. 11.
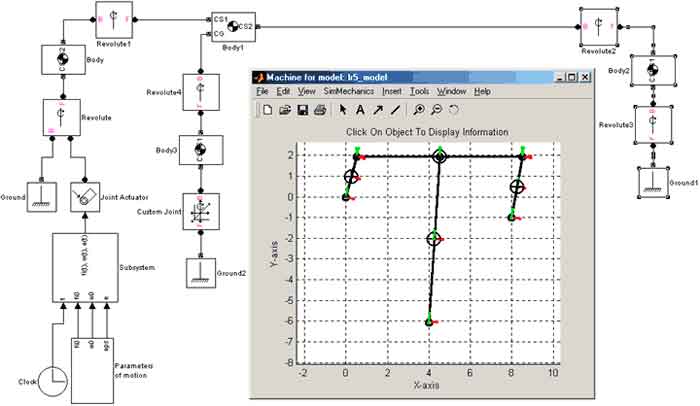
Рис. 11 — Вариант построения имитационной модели механизма, представленного на рис. 10