СИСТЕМИ КЕРУВАННЯ ТРИКОПТЕРАМИ
Автор:Р.В. Заровський, канд. техн. наук, Р.О. Бисько
Источник: Чернігівський державний технологічний університет, м. Чернігів, Україна.
Автор:Р.В. Заровський, канд. техн. наук, Р.О. Бисько
Источник: Чернігівський державний технологічний університет, м. Чернігів, Україна.
Розглянуто модель мультироторної системи на прикладі трикоптера, для якого запропоновано два варіанти системи керування. Проведено порівняння точності визначення кутів нахилу трикоптера за двома алгоритмами. Отримані результати можуть бути використані в подальшому для побудови систем керування мультироторними апаратами з використанням датчиків інерціальної навігації.
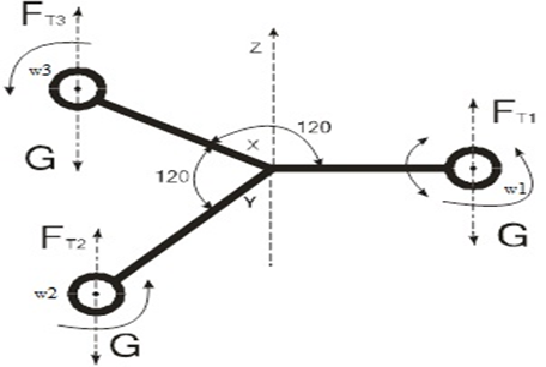
Рисунок 1 – Схема трикоптера
В даній статті розглядаються принципи побудови систем керування мультироторними апаратами на прикладі трикоптера з використанням датчиків безплатформної навігаційної системи. Мультикоптер – це керований дистанційно або автономний мультироторний безпілотний літаючий апарат з трьома (трикоптер рис.1), чотирма (квадрокоптер), шістьма (гексокоптер), вісьмома (октокоптер) гвинтами.
FT1, FT2, FT3 – тяга, створювана першим, другим та третім двигуном; w1, w2, w3 – частоти обертання роторів відповідних двигунів; G-сила земного тяжіння
Типовими вимогами до систем керування мультироторними апаратами є [1, 2]:
- зменшення масогабаритних показників системи керування та збільшення часу польоту;
- підвищення стабільності літаючих апаратів, що забезпечується шляхом зменшення помилки визначення кутів орієнтації та застосування відповідних законів регулювання;
- спрощення процедури управління безпілотними літаючими апаратами, реалізація функцій напівавтоматичного керування та автопілоту.
Визначення кутів орієнтації літаючого апарату в просторі відбувається за допомогою інерціальної навігаційної системи (ІНС). Технічна реалізація методів інерціальної навігації можлива у двох варіантах – з використанням і без використання платформ, які відтворюють інерціальний базис. Перший варіант передбачає створення пристроїв, які не обертаються разом з апаратом, зберігаючи своє положення відносно інерціального базису, і слугують опорою для вимірювальної системи. Для другого варіанту – створюються пристрої, які забезпечують протягом польоту обчислення параметрів, що визначають кути між осями вимірювальної системи та інерціального базису. Керування літаючим апаратом слід розглядати як таке, що потребує постійного вирішення двох завдань – навігаційного та завдання стабілізації [1, 2]. Перше завдання полягає у визначенні необхідної траекторії літаючого апарату та в обчисленні фактичної, друге – у керуванні апаратом для підтримки необхідного курсу із заданою точністю [3]. Перший варіант зумовив появу приладів, що фізично моделюють інерціальний базис на літаючому апараті, – гіростабілізованих платформ, другий – створення безплатформних систем.
Можливість побудови реальних конструкцій і схем безплатформної ІНС обумовлена сучасним рівнем розвитку цифрової обчислювальної техніки. Для ІНС властиві наступні особливості [3]:
- відсутність помилок, пов'язаних з погрішностями стабілізації власної платформи;
- відсутність кутових обмежень на маневри літаючих апаратів;
- спрощення механічної частини, зменшення габаритів, маси та енергоємності системи за рахунок відсутності карданового підвісу.
В таких схемах більшою мірою проявляються погрішності, пов'язані з обробкою сигналів датчиків, тому актуальною задачею є створення систем керування, які усувають цей недолік.
Метою дослідження є побудова фізичної моделі трикоптера, системи керування та стабілізації літального апарату, а також розробка методів корекції сигналів датчиків ІНС із застосуванням фільтрів.
Одним з варіантів систем керування трикоптером є система, алгоритм роботи якої заснований лише на сигналах гіроскопів (рис.2).
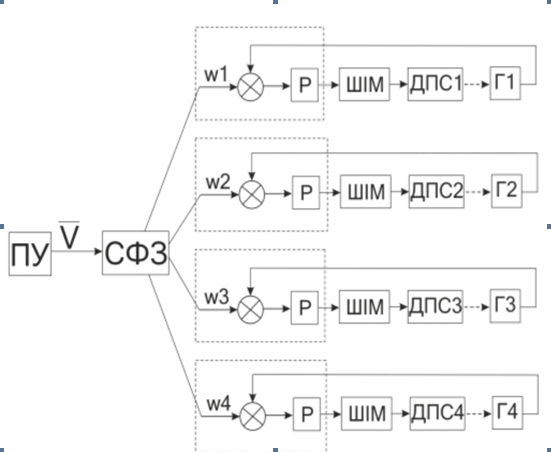
Рисунок 2 – Структурна схема системи керування трикоптером
ПУ – пульт управління; СФЗ – система формування завдання; Р – пропорційно-інтегрально-диференційний регулятор; ДД – драйвер двигуна; ШІМ – блок-формувач сигналу з широтно-імпульсною модуляцією; ДПС – двигун постійного струму; Г – датчик кутової швидкості.
В такій системі за допомогою пульта управління задається вектор швидкості . Система формування завдання розкладає вектор завдання швидкості на складові частини w1, w2, w3, w4, які слугують сигналами завдання для окремих каналів системи автоматичного регулювання (САР) та визначають частоти обертання тягових двигунів і кут обертання рульового. В такій системі регулювання частота обертання кожного двигуна постійного струму ДПС1, ДПС2, ДПС3, ДПС4, тобто створювана кожним двигуном тяга, стабілізується на рівні сигналу завдання кожного контуру САР. Змінюючи тягу двигунів, з пульта управління контролюють кутові переміщення трикоптера, тобто його орієнтацію в просторі.
В каналах САР, після елементу порівняння, виробляється сигнал помилки, тобто різниця між заданим кутом нахилу та заміряним гіроскопом кутом відхилення. Далі сигнал помилки потрапляє на ПІД регулятор, в якому виробляється керуючий сигнал. Параметри налаштування складових ПІД регулятора повинні визначатися індивідуально для кожної окремої фізичної реалізації трикоптера. Вони залежать від конструкції та геометричних розмірів апарату, характеристик двигунів та їх драйверів, вимог до динаміки та точністних характеристик САР.
В системі керування (рис.2) СФЗ може бути реалізована різними способами. Один з варіантів структури СФЗ представлений на рис. 3.
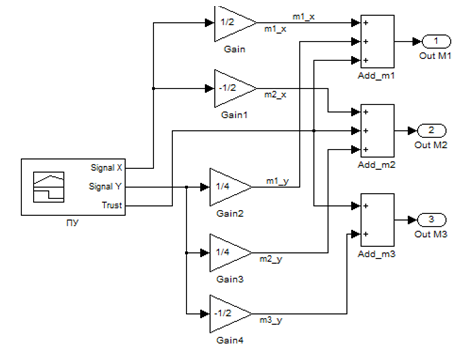
Рисунок 3 – Структура системи формування завдання
СФЗ (рис.3) розкладує вектор завдання, тобто відхилення по осях X (signal X) та Y (signal Y) на три сигнали керування двигунами M1, M2 та M3. Перший варіант, за яким система СФЗ буде формувати завдання, це варіант, в якому частота обертання першого двигуна під час маневру буде залишатися незмінною і за обертання будуть відповідати двигуни M2 та M3. Такий варіант досить простий, але займає більше часу на маневр, ніж при задіянні двох або трьох (в залежності від маневру) двигунів. Тому алгоритм розкладання завдання (рис. 3) є ефективнішим і його було реалізовано в цій роботі. Як видно, signal X та signal Y розкладаються на складові сигнали керування двигунами по осі Х – m1_x та m2_x, по осі Y – m1_y, m2_y та m3_y. Далі ці сигнали додаються за приналежністю до двигунів. Так, на перший двигун повинні прийти сигнали m1_x та m1_y.
Система керування трикоптером з використанням акселерометрів та гіроскопів, на відміну від попередньої системи, є більш стабільною через те, що кути орієнтації трикоптера визначаються системою з двох датчиків (рис.5), що підвищує точність стабілізації та керування.
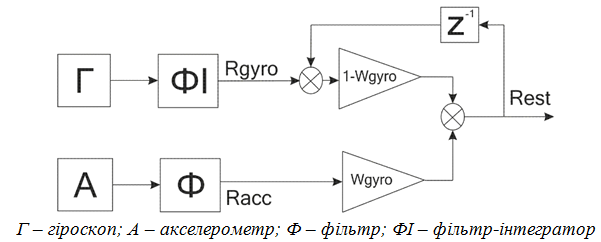
Рисунок 5 – Структура схеми знаходження кутів нахилу
В такій системі пропонується проводити «склеювання» кутів, визначених на основі показань гіроскопа та акселерометра, що містяться в базисах Rgyro та Racc відповідно, за допомогою методу, що використовує рекурсивне експоненційне згладжування. Експоненційне згладжування – метод математичного перетворення, що використовується при прогнозуванні часових рядів [4].
При рекурсивному застосуванні експоненційного згладжування кожне нове значення (яке є також прогнозом) обчислюється як зважене середнє поточного спостереження і згладженого ряду. Емпіричні дослідження Makridakis показали [4], що просте експоненційне згладжування дає досить точний прогноз.
Використаємо функцію експоненційного згладжування для нашого випадку і отримаємо формулу визначення кутів нахилу
Rest = Racc*wGyro + (Rgyro + Rest(n-1)) *(1 - wGyro ), (1)
де wGyro – коефіцієнт довіри до показань датчиків; Racc – базис кутів, визначений за показаннями акселерометрів; Rgyro – базис кутів, визначений за показаннями гіроскопів.
Для порівняння методів знаходження кутів відхилення було проведено експеримент, під час якого фіксувалася зміна кута нахилу, отримана за кожним методом при обертанні пристрою на 410 навколо осі Х (рис. 6).
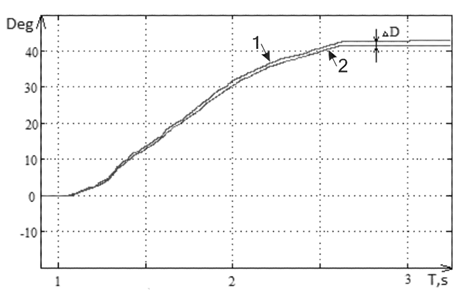
Рисунок 6 – Кути нахилу визначені за двома алгоритмами
На рис. 6 кривій 1 відповідає кут нахилу, визначений за сигналами гіроскопічного модуля, кривій 2 – на основі показань гіроскопа та акселерометра. При максимальному відхиленні кут, визначений за показаннями гіроскопічного модуля, дає помилку D приблизно 1.5, тобто 2.6%. З цього можливо зробити висновок, що кут, визначений лише гіроскопічним модулем, дає похибку, яка при накопиченні в часі призведе до неможливості автостабілізації літального апарату без втручання оператора.
- Встановлено, що при використанні інерціальної системи навігації для точної стабілізації необхідно враховувати помилку, що накопичується при вимірюваннях інерціальних датчиків;
- Запропоновано дві схеми управління трикоптером: це система керування трикоптером, заснована на показаннях гіроскопів, та система керування трикоптером з використанням гіроскопів та акселерометрів.
- Запропоновано систему керування трикоптером з використанням мікромеханічних датчиків, у якій сигнали керування двигунами формуються з урахуванням вихідних сигналів всіх каналів керування, що підвищує швидкодію відпрацювання завдання.
- При порівнянні ефективності роботи систем визначення кутів орієнтації трикоптера в просторі за двома алгоритмами зроблено висновок, що алгоритм, який використовує сигнали системи мікромеханічних датчиків, є ефективнішим, ніж алгоритм, що використовує сигнали лише гіроскопічних модулів.
1. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. – М.: Машиностроение, 1974. – 340 с.
2. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - М.: Наука, 1974. - 600 с.
3. Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. – М.: Наука, 1992. – 280 с.
4. Makridakis S. Forecasting Methods for Management. – New York et al.: John Wiley & Sons, Inc., 1980. – 612 p.
5. http://www.youtube.com/watch?v=evy7B1GRE1k