Назад в библиотеку
Моделирование устройств регулирования пуска ленточных конвейеров
Автор: Соседка В.Л., к.т.н., Фабричный Д.Н.
Источник: Гірнича електромеханіка та автоматика / Збірник наукових праць. – Днепропетровск, ДНГУ – 2005, Выпуск 74, http://archive.nbuv.gov.ua/portal/natural/geta/2005_74/11.pdf
Аннотация
Соседка В.Л., к.т.н., Фабричный Д.Н. Моделирование устройств регулирования пуска ленточных конвейеров. В работе приведены рациональные пусковые характеристики ленточного конвейера с жестким и автоматическим натяжными устройствами. Планируется применение полученных моделей для
моделирования режимов пуска ленточных конвейеров различных конструкций.
Текст статьи
Влияние различных устройств регулирования пуска на качество
переходного процесса в конвейерной ленте до сих пор до конца не изучено.
Задача управления процессом пуска ленточного конвейера осложняется из-за
различного конструктивного исполнения конвейеров и их составных частей,
выбранной схемы электропривода и условий его работы.
Существует ряд работ, в которых рассматривается моделирование
процесса пуска ленточного конвейера и разнообразные способы оптимизации
данного процесса. Однако этого недостаточно для полного применения на
практике.
Цель статьи — разработка функциональных моделей устройств
регулирования пуска, наиболее точно описывающих процессы в реальных
устройствах. Планируется применение полученных моделей для
моделирования режимов пуска ленточных конвейеров различных конструкций.
В работе [1] приведены рациональные пусковые характеристики
ленточного конвейера с жестким и автоматическим натяжными устройствами.
Для обеспечения этих характеристик необходима работа конвейерного привода
по двухпериодной диаграмме пуска. При этом пусковой момент в период
трогания конвейерной ленты требуется меньшим, чем в период ее разгона до
номинальной скорости.
Наибольшее распространение в практике эксплуатации ленточных
конвейеров получили непосредственный привод и привод с турбомуфтой. На
конвейерах длиной до 300 м и суммарной мощностью до 50 кВт рационально
применение непосредственного привода. В таком приводе асинхронный
двигатель питается напрямую от сети и отсутствуют устройства регулирования
пуска. Непосредственный привод имеет ленточный конвейер 1Л80. Паспортные
данные электродвигателя конвейера приведены в таблице.

Паспортные данные приводного электродвигателя конвейера 1Л80
Модель непосредственного привода ленточного конвейера может быть
набрана из стандартных блоков пакета MATLAB (рис.1).
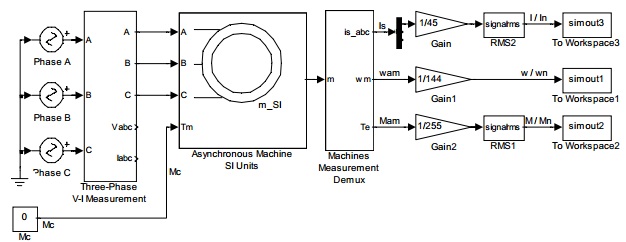
Рис. 1. Модель непосредственного привода ленточного конвейера
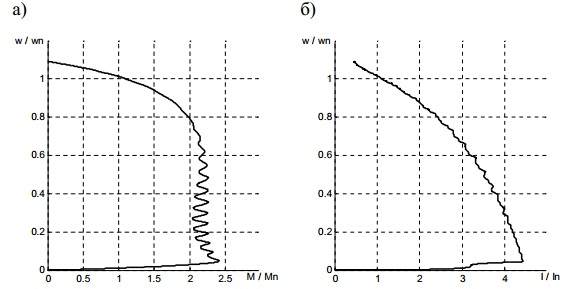
Рис. 2. Механическая (а) и электромеханическая (б) характеристики
приводного двигателя КОФ41-4
На рис.2 изображены естественные статические характеристики
приводного двигателя конвейера 1Л80, из которых видно, что номинальные
значения, полученные на модели, соответствуют паспортным. Следовательно,
модель вполне применима для моделирования режимов пуска ленточных
конвейеров.
Как известно, основные недостатки непосредственного привода –
большие пусковые токи и приложение сразу полного момента к нагрузке на
валу. Так, резкое увеличение пускового момента приводит к значительным
динамическим перегрузкам в ленте, и соответственно ее перенатяжениям и
пробуксовке на приводных барабанах, непосредственный пуск сопровождается
продольными колебаниями в ленте, что может стать причиной просыпания
транспортируемого материала.
Значительного улучшения пусковых характеристик конвейера достигаютза счет использования различных устройств регулирования пуска (турбомуфт,
электромагнитных муфт, автоматических систем пуска).
В настоящее время перспективным направлением является применение
для регулирования пуска маловентильных тиристорных преобразователей
напряжения (ТПН) [4]. В последние годы отечественными разработчиками на
основе ТПН были созданы устройства плавного пуска (УПП) для ленточных
конвейеров с однодвигательным приводом [5], которые включаются между
двигателем и сетью, не нарушая схему электроснабжения и управления
конвейером. Система реализует режим фазового управления выходным
напряжением путем изменения угла открытия тиристоров, что позволяет
регулировать момент и осуществлять более плавный разгон конвейерной ленты
до номинальной скорости. Подобным устройством может быть оснащен и
конвейер 1Л80.
Модель привода с УПП приведена на рис.3. В блок-схему модели
добавлен дополнительный блок подсистемы (Subsystem UPP), содержащей
модель УПП.
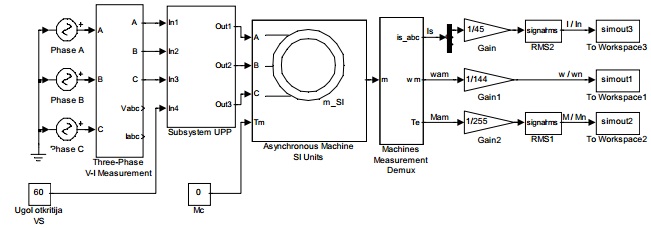
Рис. 3. Модель привода с УПП в режиме фазового управления двигателем
На рис.4 изображены искусственные статические характеристики
приводного двигателя конвейера 1Л80, полученные на модели в режиме
фазового управления (рис.3). При моделировании угол открытия тиристоров ТПН
равнялся 60°. Как видно из характеристик (рис.4), благодаря снижению
напряжения, питающего двигатель, произошло уменьшение пускового момента
двигателя до уровня 1,5Mn и пускового тока до значения 3,7In, что
соответствует реальным процессам при фазовом управлении АД. Таким
образом, при помощи канала управления по напряжению УПП позволяет
формировать пусковые режимы ленточного конвейера.
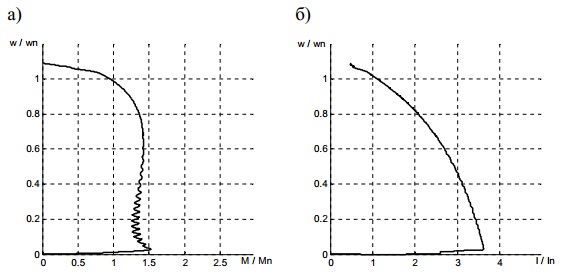
Рис. 4. Механическая (а) и электромеханическая (б) характеристики приводного двигателя
КОФ41-4 в режиме фазового управления
При пуске конвейера эффективным является уменьшение ускорения, что
достигается за счет увеличения времени разгона до номинальной скорости. Но
при увеличении длительности разгона конвейера в режиме фазового
управления может происходить перегрев обмоток статора и особенно стержней
клетки ротора двигателя из-за длительного действия пускового тока в области
низких частот вращения.
Перспективным является разработка ТПН с квазичастотнофазовым
управлением. Квазичастотнофазовое управление предполагает совместное
использование квазичастотного и фазового режимов управления АД. При этом
квазичастотный режим используется в области низких частот вращения
приводного электродвигателя, а фазовый — в области средних частот.
Требуемые пусковые характеристики привода в режиме квазичастотного
управления формируются по двум каналам – напряжения и частоты. Режим
квазичастотного управления АД обеспечивает устойчивую пониженную
частоту вращения ротора и может использоваться для реализации предпусковой
ступени конвейерного привода [4].
Модель привода с квазичастотнофазовым управлением может быть
построена на основании модели привода с УПП. Для этого в подсистему УПП
необходимо добавить канал управления по частоте (рис.5).
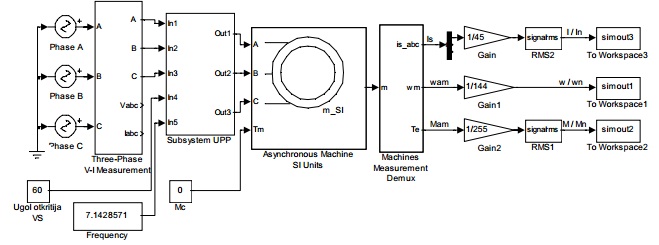
Рис. 5. Модель конвейерного привода с УПП в режиме квазичастотного
управления двигателем
На рис.6 приведены искусственные статические характеристики
приводного двигателя конвейера 1Л80, полученные на модели в режиме
квазичастотного управления. При моделировании частота выходного
напряжения УПП была задана 7,14 Гц, а угол открытия тиристоров ТПН - 60°.
Как видно из характеристик пусковой момент составил около 1,8 Mn, а
пусковой ток – 2 In, что соответствует реальным процессам при квазичастотном
управлении АД. Устройство плавного пуска в режиме квазичастотного
управления позволяет формировать пусковые режимы конвейера в области
низких частот вращения с ограничением пускового тока. Определенным
недостатком такого управления является пульсация электромагнитного
момента в процессе пуска. Однако, благодаря значительному демпфированию
колебаний момента конвейерной лентой квазичастотное управление вполне
приемлемо для создания предварительного натяжения по контуру и трогания
ленты. Дальнейший разгон до номинальной скорости выполняется при фазовом
управлении приводным двигателем.
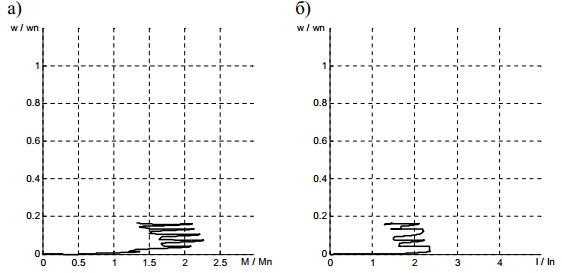
Рис. 6. Механическая (а) и электромеханическая (б) характеристики приводного
двигателя КОФ41-4 в режиме квазичастотного управления
Выводы:
- Из-за отсутствие возможности регулирования момента в период пуска
непосредственный привод не позволяет обеспечить рациональные
характеристики ленточного конвейера.
- Применение маловентильных тиристорных преобразователей
напряжения ТПН в режиме фазового управления позволяет регулировать
момент в период пуска, но при увеличении длительности разгона конвейера
может происходить перегрев двигателя в области низких частот вращения.
- Перспективным направлением является исследования качества
переходных процессов в конвейерной ленте при использовании ТПН с
квазичастотнофазовым управлением. Режим квазичастотного управления
позволяет регулировать момент приводного двигателя в области низких частот
вращения с ограничением пускового тока.
- Полученные модели приводов и устройств регулирования пуска
достаточно точно описывают процессы в реальных устройствах и вполне
применимы для моделирования пусковых режимов ленточных конвейеров
различных конструкций.
Список использованной литературы
1. Фабричный Д.Н. Анализ электромеханических систем пуска ленточных конвейеров / Д.Н. Фабричный // Гірнича електромеханіка та автоматика: Наук. – техн. зб. – 2003. – №70.
2. Кузнецова Б.А. Транспорт на горных предприятиях / Б.А. Кузнецова. — 2-е изд., перераб. и доп. — М.: Недра, 1976. — 552 с.
3. Котов М.А. Зарубежные подземные ленточные конвейеры (Обзор) / М.А. Котов. — М., 1973. – 79 с.
4. Маренич К.М. Асинхронний електропривід гірничих машин з тиристорними
комутаторами / К.М. Маренич. – Донецьк: ДонНТУ, 1997. – 64 с.
5. Ляшенко Н.И., Панасенко А.В., Зеленецкий В.Н. Некоторые результаты эксплуатации
аппарата АПМ управления пуском электропривода ленточного конвейера / Н.И. Ляшенко, А.В. Панасенко, В.Н. Зеленецкий // Уголь Украины.
– 1997. – №12. – С.35.
6. Семенченко А.Т. и др. Новый электропривод ленточных конвейеров для шахт / А.Т. Семенченко и др. // Уголь
Украины. — 2000. – №10. – С.40.