Математические моделирование трёхфазного асинхронного двигателя малой мощности
Автор: N.N. Soe, T.T. Han Yee, S.S. Aung
Автор перевода: Дулин И.А.
Источник: http://www.waset.org/journals/waset/v18/v18-79.pdf
Автор: N.N. Soe, T.T. Han Yee, S.S. Aung
Автор перевода: Дулин И.А.
Источник: http://www.waset.org/journals/waset/v18/v18-79.pdf
N.N. Soe, T.T. Han Yee, S.S. Aung Математические моделирование трёхфазного асинхронного двигателя малой мощности. В статье проведено математическое моделирование асинхронного двигателя малой мощности. Математическое моделирование является одним из ключевых шагов в процессе проверки при проектирования системы. Основной задачей этого метода является устранение случайных ошибок при проектировании. Моделирование асинхронного двигателя в установившемся режиме осуществляется с помощью системы MATLAB и в частности её подсистемы Simulink.
Конструкция асинхронного двигателя схожа с конструкцией электрического трансформатора, у которого магнитная цепь, разделена воздушным зазором на две части – статор и ротор. Переменный ток, подаваемый к статору от энергосистемы, индуцирует ток в роторе. Движение между статором и ротором происходит за счёт электромагнитных сил, т.е. мощность передаётся через воздушный зазор с помощью электромагнитной индукции.
Отличительной особенностью асинхронных двигателей является то, что токи в роторе создаются исключительно благодаря электромагнитной индукции, как и в трансформаторе, а не за счёт постоянного тока возбудителя или других внешних источников питания, как, например, в синхронных машинах или машинах постоянного тока. Эквивалентная схема замещения асинхронного двигателя очень похожа на схему замещения трансформатора.
Асинхронный двигатель является наиболее часто используемым в промышленности из-за простоты и прочности конструкции, надёжности при эксплуатации, простоты в обслуживании, низкой начальной стоимости, высокой эффективности.
Так же существует множество устройств для управления пуском и скоростью вращения асинхронного двигателя, благодаря чему их характеристики можно менять в зависимости от применения.
Наиболее эффективной конструкцией асинхронного двигателя является конструкция типа «беличья клетка». Она наиболее надёжна и проста в эксплуатации [1].
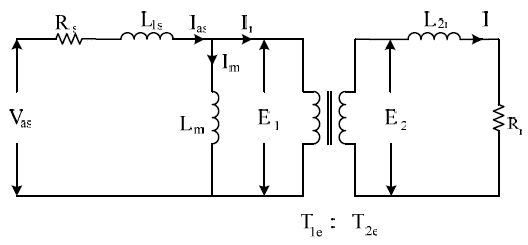
Рисунок 1 – Схема замещения асинхронного двигателя
С ротором в неподвижном состоянии, сопротивление фазы статора измеряется посредством приложения постоянного напряжения и тока к фазе и получением результирующего тока на выходе. Это процедура даёт сопротивление при постоянном токе при определённой температуре, однако оно может быть пересчитано в сопротивление на переменном токе, при этом должны учитываться сечение кабеля, частота напряжения в статоре и рабочая температура.
Асинхронный двигатель приводится в движение другим двигателем, предпочтительно двигателем постоянного тока и движется с его синхронной скоростью. Затем на статор подаётся номинальное напряжение и при номинальной частоте вращения измеряется мощность в каждой из его фаз.
Ротор асинхронного двигателя блокируется и становится неподвижным. При этом на статор подаётся ряд низких трёхфазных напряжений, после чего рассчитываются токи статора. При этом измеряется входная мощность каждой фазы, а также входное напряжение и ток статора. В таком режиме, скольжение становится равным нулю, и схема напоминает схему трансформатора [2].
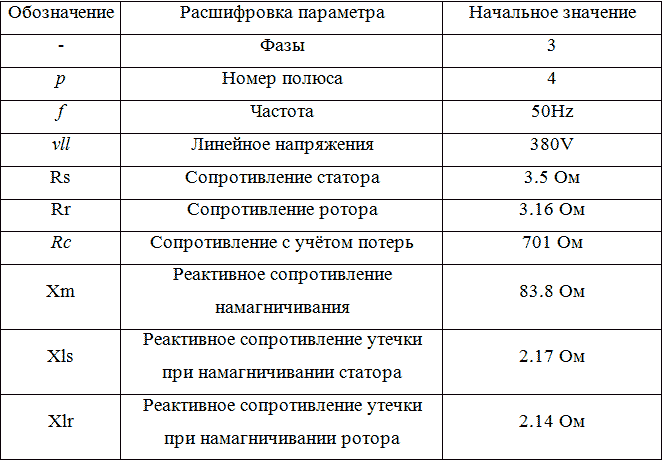
Необходимые параметры для расчёта асинхронного двигателя в установившемся режиме получены в ходе лабораторных исследований. В статье представлены ряд скоростных характеристик крутящего момента и мощности, а так же КПД и величины токов статора и ротора асинхронного двигателя.
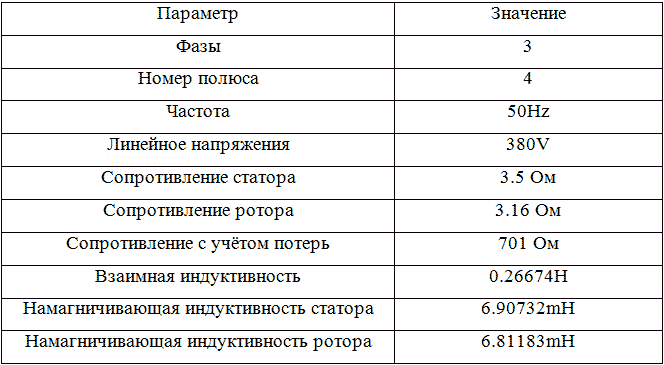
Таблица1. Начальные параметры асинхронного двигателя
Крутящий момент при максимальной нагрузке:
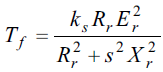
где s – максимальное значение скольжения
Максимальный крутящий момент:
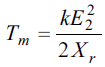
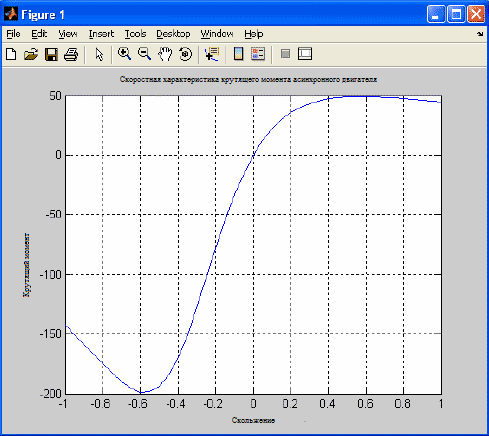
Рисунок 2 – Скоростная характеристика крутящего момента асинхронного двигателя
Где скорость ротора:
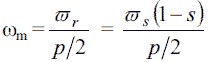
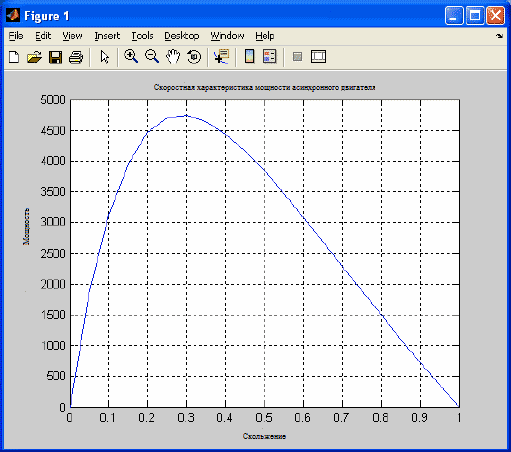
Рисунок 3 – Скоростная характеристика мощности асинхронного двигателя
Рисунок 4 – Величина тока статора асинхронного двигателя
При эксплуатации асинхронного двигателя происходят различные потери мощности: потери на нагрев проводки статора и ротора, потери в сердечнике статора, а так же потери на силу трения и сопротивление воздуха при вращении ротора. В сердечнике ротора также присутствуют потери, однако при использовании асинхронного двигателя частота вращения ротора достаточно низкая вследствие чего учитываются только потери в сердечнике статора.
КПД асинхронного двигателя может быть определён путём включения его в нормальный режим работы и измерения при этом мощности на входе и на выходе.
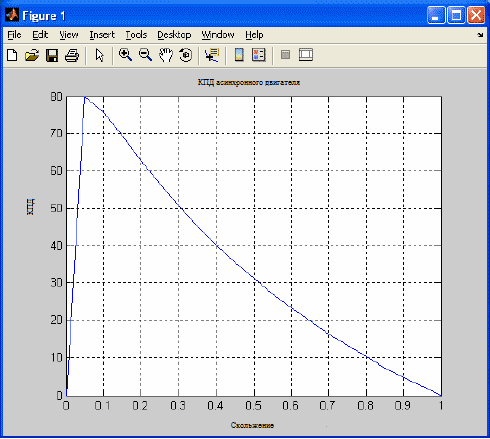
Рисунок 5 – КПД асинхронного двигателя
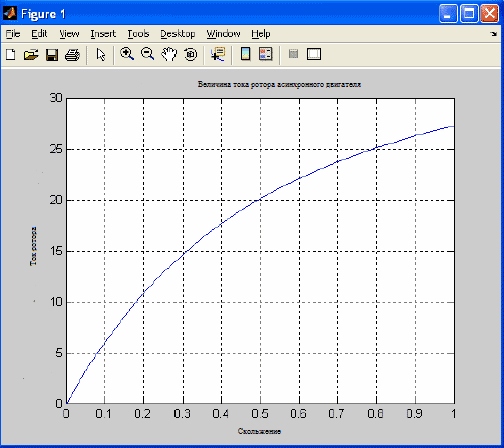
Рисунок 6 – Величина тока ротора асинхронного двигателя
При построении графиков вместо скорости ротора было использовано скольжение т.к. оно безразмерно и применимо к любой частоте вращения ротора.
Возле синхронной скорости при низких значениях скольжения вращающий момент линеен и пропорционален скольжению. При остальных значения вращающего момента, кроме максимальных, он обратнопропорционален скольжению [3].
Блок-схема, которая используется для оценки стационарных характеристик асинхронного двигателя, приведена на рисунке 7. Скоростная характеристика крутящего момента асинхронного двигателя приведена на рисунке 2. Моделирование проведено от точки -1 до 1. Из графика можно сделать вывод что максимальное значение крутящего момента наблюдается при значении скольжения 0.2, а минимальное при значении скольжения - 0.2.
Математическая модель асинхронного двигателя создана в системе Simulink.
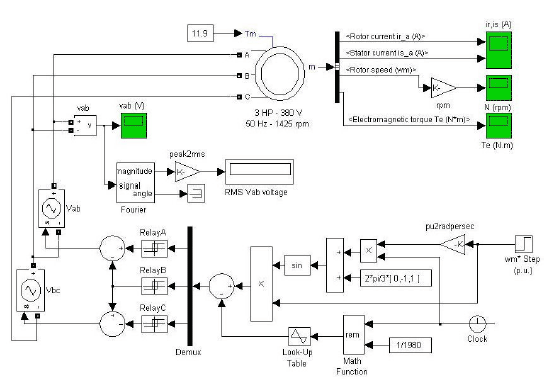
Рисунок 7 – Simulink блок-схема трёхфазного асинхронного двигателя
Таблица2. Параметры блок-схемы асинхронного двигателя
Трёхфазный асинхронный двигатель 380 В, 1425 об/мин питается от синусоидального инвертора PWM. Частота работы синусоидального инвертора составляет 50 Гц, инвертор PWM построен с помощью стандартных блоков Simulink.
Напряжение от инвертора проходит через блоки измерения напряжения – Controlled Voltage Source blocks, после чего попадает в асинхронный двигатель. Ротор – короткозамкнутый. Значение индуктивности статора Lls удвоено для моделирования эффекта сглаживания. Нагрузка постоянна и составляет 11,9 Н/м.
На рисунке 8 изображена кривая разгона асинхронного двигателя. Номинальная скорость достигается через 0.8 секунды после запуска и состовляет 1425 об/мин.
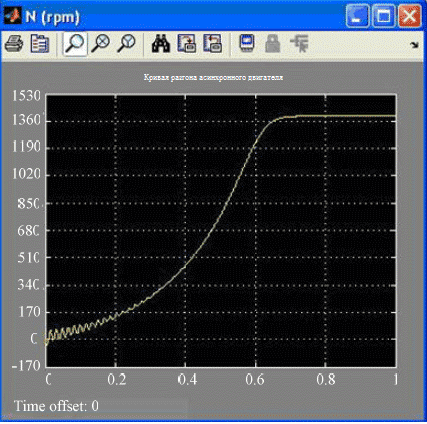
Рисунок 8 – Кривая разгона асинхронного двигателя
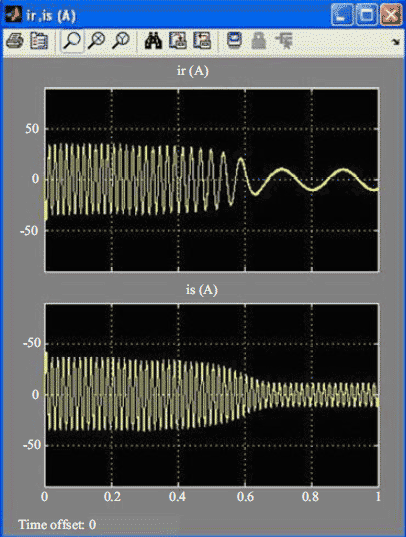
Рисунок 9 – Значение тока в статоре и роторе асинхронного двигателя
На рисунке 9 изображено значение тока в статоре и роторе асинхронного двигателя. На графиках видно, что ток в роторе имеет высокую частоту колебаний между 0 и 0.6 секунды. Ток в статоре, в это же время, имеет повышенное значение, после чего устанавливается постоянное значение в 10А.
На рисунке 10 изображена кривая электромагнитного вращающего момента трёхфазного асинхронного двигателя. С 0 по 0.4 секунды кривая имеет колебательный характер. После чего до 0.8 секунды происходит ещё один скачок и с 0.8 секунды можно наблюдать постоянный крутящий момент относительно заданной нагрузке – 11.9Н/м.
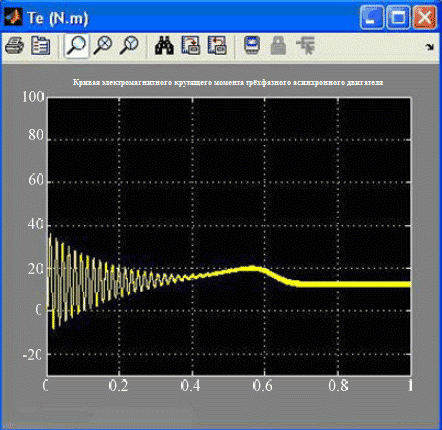
Рисунок 10 – Кривая электромагнитного крутящего момента трёхфазного асинхронного двигателя