Назад в библиотеку
Влияние взаимодействия комбайна и секций крепи на управляемость забойным конвейером
Автор: Н.Н.Городилов
Источник:
Научно-технический журнал: «Вестник Кузбасского государственного технического университета».– Кузбасский государственный технический университет им. Т.Ф. Горбачева – 2010, Выпуск 1, с. 47-48.
Аннотация
Приведена зависимость влияния углов наклона забоя в лаве и углов наклона тяги, передвигающей забойный конвейер на угол его крена.
Cодержание
При работе механизированного комплекса в сложных горно-геологических условиях, где приходится вести комплекс в нарушенных участках отрабатываемого столба, особенно при входах и выходах комплекса из мульды, определяющим фактором становится движения забойного конвейера с соединенными с ним секциями крепи. Хорошая управляемость забойного конвейера обеспечивает эффективное «вписывание» комплекса в угольный пласт при проходе нарушенных участках отрабатываемого столба. В этих условиях основным фактором управляемости конвейера становится принятая кинематическая схема его связи к секции крепи, а также учет влияния различных технологических факторов на положение конвейера в лаве.
В кинематическом отношении схемы связи забойных конвейеров с секциями крепей реализованы в виде стержневых систем с шарнирными, жесткими и направляющими соединениями. Механизм управления забойным конвейером в комплексе KM-I20 использовал гидродомкрат, обеспечивающий возможность подъема тяги, соединяющей забойный конвейер с основанием секции крепи. Такое воздействие позволяет управлять конвейером, перемещая линию действия силы, передвигающей конвейерный став. Забойный конвейер в комплексе 1MKM управляется принудительным подъемом с помощью домкрата завальной части конвейера относительно шарнира соединяющего его с тягой передвижки конвейера, которая перемещается гидродомкратом передвижки секции крепи. При передвижке забойных конвейеров в комплексах типа УКП тяги передвигающие конвейер прижимается к почве пласта направляющими, расположенными в основаниях секций крепи. Крепи типа КМ138 оснащены направляющими механизмами, которые ограничивают подъем конвейера и тяги его передвигающей, а при передвижке секции крепи исполняют роль направляющего и опорного элемента, приподымая над ним переднюю, часть секции крепи, облегчая этим её передвижку при наличии штыба на почве. В некоторых схемах связи забойных конвейеров с секциями крепей через тяги или непосредственно гидродомкраты передвижки используются кронштейны, закреплённые по завальной части конвейеров, с вертикальным рядом отверстий, через которые забойный конвейер может передвигаться. При этом производится ступенчатое регулирование положения точки приложения силы передвигающей конвейер.
Учитывая большое разнообразие схем механизмов управления конвейером можно предположить, что все эти варианты управления работают, не всегда эффективно особенно в сложных условиях, где наблюдается оставление на почве угля после прохода комбайна или при работе комплекса в зонах участках отрабатываемого столба, где имеются мульды. В основном механизмы связи забойных конвейеров с секциями крепей призваны исключить возможные «всплывания» конвейера, т.е. самопроизвольный подъем его забойной части вверх, что приводит к частичной потере управляемости комплекса в целом.
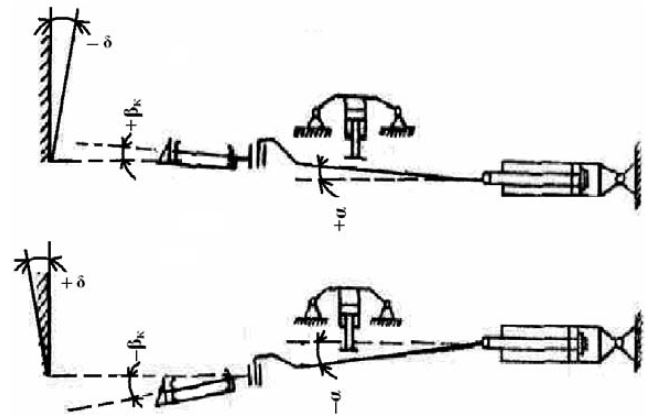
Рис. 1 – Положение механизма управления забойным конвейером и углов его крена в поперечном к забою направлении, а также углов наклона тяги его передвигающей и угла наклона забоя.
В комплексе КМ-138 использована шарнирная привязка забойного конвейера, обеспечивающий поворот тяги относительно конвейера в плоскости пласта. Взаимный их поворот в плоскости, перпендикулярной почве пласта, ограничен только величиной зазоров в шарнире. Были исследованы при этом управляемость забойного конвейера по углам его поперечного крена с учётом наклона тяги его передвигающей и угла наклона забоя, отображающим наклон почвы пласта.
Наблюдения за работой конвейера показали, что после выемки очередной полосы угля в лаве на почве оставалось, значительное количество угля вследствие плохой погрузочной способности комбайна, что приводило к значительным колебаниям углов крена комбайн, крена конвейера и тяги его передвигающей. При работе комбайна углы его крена, вызывали изменения углов наклона забоя относительно вертикали и плоскости дорожки относительно горизонтали. Измерялись при этом углы наклона забоя на завал со знаком «минус», при наклоне забоя в сторону массива со знаком «плюс». Одновременно измерялись углы наклона тяги, передвигающей забойный конвейер, которые измерялись при наклоне тяги вверх от горизонтали со знаком «плюс», а при наклоне её вниз от горизонтали со знаком «минус». Углы наклона забоя (они соответствуют углу наклона дорожки относительно горизонтали) и тяги приняты в качестве основных факторов, влияющих на положение забойного конвейера, которое оценивались углом его крена. Угол крена конвейера является откликом двухфакторной зависимости, которая характеризует управляемость конвейера. При этом угол крена конвейера со знаком «плюс» указывает на подъем его по направлению к кровле (тенденция к «всплыванию»), а угол крена конвейера со знаком «минус» спуск его к почве (тенденция к «запахиванию»).
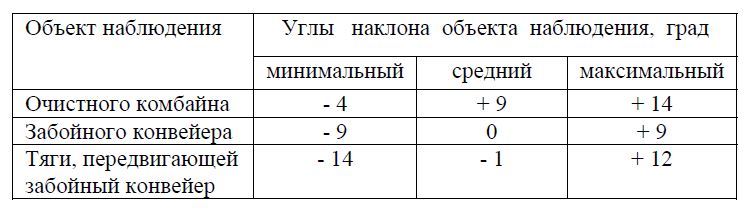
Таблица 1 – Результаты наблюдения за углами наклона забойного конвейера при заданных углах наклона тяги его передвигающей и забоя в лаве
Приведенный метод оценки управляемости забойного конвейера позволяет оценить его положение при работе механизированного комплекса на пластах в сложных горно-геологических условиях. Оперативный контроль и измерение углов наклона тяги, передвигающей конвейер, и углов крена комбайна и става забойного конвейера позволит обеспечить целенаправленное управление конвейером. Такую систему управления забойным конвейером можно реализовать, оснастив комбайн измерительными датчиками, регистрирующими углы крена забойного конвейера и очистного комбайна при контроле углов наклона тяги передвигающей конвейер.
Литература
- Картавый, Н.Г. Автоматизация управления движением горных машин, комплексов к агрегатов/ В.А. Ульши, В.В. Глушко: Учебное пособ. – М.: Московский горный институт, 1969. – 170 с.
- Особенности внедрения очистных комплексов / Д.Д. Глазов, А.Д. Орищин, B.C. Верин, Н.И. Яковлев, А.Т Ермолаев, Н.М. Дворецкий. – Кемерово: Кемеровское книжное издательство, 1975. – 157 с.