
Реферат за темою випускної роботи
Зміст
- 1. Загальна постановка задачі та її актуальність
- 2. Огляд досліджень та розробок
- 3. Постановка задачі дослідження
- 4. Вирішення задачі та результати дослідження
- Висновки
- Список джерел
1. Загальна постановка задачі та її актуальність
Традиційною при проектуванні цифрових систем управління є гіпотеза про те, що період дискретності є постійним, і він не змінюється під час експлуатації системи. Але сучасна технологія реалізації систем автоматики базується на використанні розвинених телекомунікаційних мереж, таких як DeviceNet, Ethernet, FireWire та інших, яки зв’язують датчики і виконавчі механізми з контролерами, тобто між контролером (управляюча частина системи) и об’єктом з датчиками і виконавчими механізмами знаходиться телекомунікаційна мережа, ресурси якої використовують також інші контролери. Цей тип системи має перевагу більшої гнучкості щодо традиційних систем управління. Крім того, це допускає зменшене дротове з'єднання, а також більш низьку вартість установки. Це також дозволяє більшу швидкість в діагнозі і правилах технічного обслуговування. Типові приклади: розподілені промислові САУ / АСУ, інтелектуальні транспортні системи, супутникові кластери та групові маневри, масиви мобільних датчиків, кілька автономних мобільних роботів, гнучкі децентралізовані виробничі систем великого масштабу, організація польоту групи безпілотних літальних апаратів, багатоагентні системи, просунуті мережі літальних і космічних апаратів і т.д. Комунікаційна мережа у зворотному зв'язку робить аналіз та проектування мережевого комплексу систем управління досить складним. Інструменти і методи, розроблені в стандартній теорії управління, недостатні для цього аналізу і повинні бути змінені для врахування додаткової складності. Одним з ключових питань, що виникають при застосуванні МCУ є ненадійні канали передачі через обмеженої смуги пропускання і великої кількості даних, переданих по одному каналу. Так як мережа пов'язана з системами управління, затримки викликані мережею завжди притаманні МСУ і при цьому завжди впливають на її роботу. У таких мережах можуть виникати колізії, яки приводять до того, що контролер отримує необхідну інформацію про стан об’єкту не у дискретні рівновіддалені моменти часу, а з випадковим зсувом у часі відносно того періоду дискретності, що був прийнятий під час проектування системи. Звісна невизначеність мережі з пакетною передачею інформації, де пакети можуть бути втрачені або зіпсовані, також веде до збільшення проміжку часу між відліками. Другою причиною, яка може бути розціненою як випадкова зміна періоду дискретності, є затримка датчиком виготовлення потрібної контролеру інформації, тому що ця інформація виникає внаслідок складних розрахунків, яки можуть тривати деякий час. Збільшення періоду дискретності негативно впливає на якість системи управління і може бути причиною втрати її стійкості. Саме ця проблема в останні роки все більш привертає увагу науковців, яки працюють в області систем управління.
2. Огляд досліджень та розробок
На зростаючий інтерес к мережевим системам управління вказує велика кількість публікацій, присвячених пошуку протидії звісної невизначеності телекомунікаційної мережі з метою гарантованого забезпечення стійкості і якості системи управління [3,4,5,6]. Серед усіх публікацій вирізняється найбільш загальним підходом до аналізу систем зі змінним періодом квантування робота [1],у якої запропоновано використати рівняння Колмогорова-Феллера щодо щільності ймовірності фазових координат. Але в останні роки виникла можливість провести дослідження стійкості мережевих систем автоматичного управління при випадкової зміні періоду дискретності на підставі теорії робастних систем. Період дискретизації розглядається як параметр, зміна якого веде до параметричної невизначеності передавальної функції цифрового регулятору (адитивної або мультиплікативної). Якщо розглянути звісні умови робастної стійкості системи, то може бути отримана оцінка максимальної зміни періоду дискретності, при якому система залишається стійкою.
3. Постановка задачі дослідження
Для того, щоб задачу дослідження динаміки цифрової системи зі змінним періодом дискретності звести до задачі дослідження робастної стійкості системи, необхідно розглянути і вирішити наступні завдання:
- З’ясувати механізм впливу змінного періоду дискретності на зміну параметрів передавальної функції регулятору або об’єкту управління (у дискретному його представленні) при переході від z- до s-площини;
- На підставі моделі системи з параметричною невизначеністю провести оцінку границі допустимій зміни періоду дискретності при збереженні стійкості системи.
4. Вирішення задачі та результати дослідження
У наступному розглядається мережева система автоматичного управління, структура якої наведена на рис.1.
Рисунок
1 – Передача інформації у мережевій САУ. 1 –
завдання,
2 – телекомунікаційна мережа, R – регулятор,
СO – об`єкт управління,
АM – виконуючий
механізм, S – датчик.
(анімація: 7 кадрів, затримка між кадрами 1 с, кількість циклів
повторення — нескінченна, розмір 88,2 килобайт, створена за
допомогою MP Gif Animator)
Регулятор, який є
реалізованим
на мікроконтролері або спеціалізованої ЕОМ, характеризується своєю
z-передавальною функцією, яка при проектуванні системи була визначена
для певного періоду дискретності ![]() .
Телекомунікаційна
мережа
може затримати передавання інформації від датчика до регулятора
на деякий час
.
Телекомунікаційна
мережа
може затримати передавання інформації від датчика до регулятора
на деякий час
![]() .З «точки зору»
аналогового об’єкту це буде означати зміну передавальної
функції регулятору. Зміну передавальної функції регулятору можна (см. [2])врахувати
у процесі перетворення z-передавальної функції регулятору до його
s-еквіваленту, підставляючи в неї
.З «точки зору»
аналогового об’єкту це буде означати зміну передавальної
функції регулятору. Зміну передавальної функції регулятору можна (см. [2])врахувати
у процесі перетворення z-передавальної функції регулятору до його
s-еквіваленту, підставляючи в неї
 ,
де
,
де ![]() - актуальний період дискретності.
- актуальний період дискретності.
Нехай, наприклад, для стабілізації
об’єкту з передавальною функцією  є розрахованим регулятор з
є розрахованим регулятор з  .
Для
періоду дискретності
.
Для
періоду дискретності  с отримана z-передавальна функція регулятору
с отримана z-передавальна функція регулятору  .
При
зміні періоду дискретності, коли
регулятор отримує сигнал від датчика
внаслідок колізії у мережі рідше ніж
.
При
зміні періоду дискретності, коли
регулятор отримує сигнал від датчика
внаслідок колізії у мережі рідше ніж  ,
загальна динаміка регулятору стає іншою ніж при номінальному періоді
дискретності. Зміну динаміки
регулятору при незмінних коефіцієнтах
його передавальної функції можна врахувати
через
параметр T білінійного перетворення
:
при різних T отримують передавальну
функцію регулятору
,
загальна динаміка регулятору стає іншою ніж при номінальному періоді
дискретності. Зміну динаміки
регулятору при незмінних коефіцієнтах
його передавальної функції можна врахувати
через
параметр T білінійного перетворення
:
при різних T отримують передавальну
функцію регулятору  , яка
безпосередньо
залежить від періоду дискретності. Для
регулятора, який розглядається у
прикладі, ця залежність має наступний
вигляд:
, яка
безпосередньо
залежить від періоду дискретності. Для
регулятора, який розглядається у
прикладі, ця залежність має наступний
вигляд:
 (1)
(1)
Після відповідних перетворювань
отримаємо структурну схему регулятору (рис.2), у складі якого є блок
ділення на , який дозволяє врахувати зміну періоду дискретності при
аналізі властивостей замкненої системи управління зі змінним періодом
дискретності.
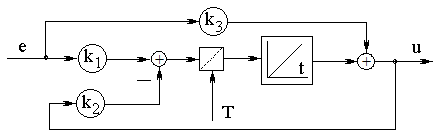
Рисунок 2 – Структурна схема регулятора з блоком ділення
На підставі рис.2 для
(верхня границя
може бути оціненою з врахуванням технічних характеристик
телекомунікаційної мережі) можна розрахувати адитивну помилку
(невизначеність) ?а
(jω) регулятору,
 -
норма якої потрібна для оцінки стійкості замкненої системи.
-
норма якої потрібна для оцінки стійкості замкненої системи.
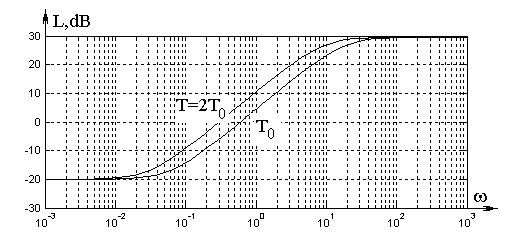
На рис.3а показані
логарифмічні
частотні характеристики регулятору для номінального періоду
дискретності і для періоду дискретності , який у
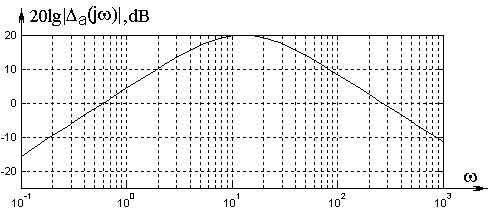
двічі більше ніж номінальний.На рис. 3б – адитивна похибка
визначення передавальної функції регулятору (1) при зміні періоду
дискретності вдвічі:
 .
.
а)
б)
Рисунок 3 – Логарифмічні характеристики регулятора:
а) для різних періодів дискретності; б) адитивна похибка.
Розглянемо систему автоматичного управління (рис.4) з номінальною моделлю об`єкту управління W (s) і регулятора WR(s), передавальна функція якого визначена з адитивною похибкою Δa(jω).
а)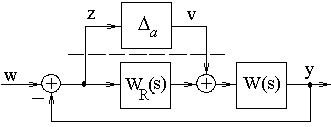 б)
б)
 в)
в)
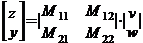
Рисунок 4 – а) Система з адитивною неневизначеністю передавальної функції регулятора
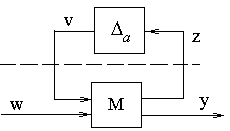
б) Представлення системи у формі М,Δ-структури
в)
Матричні
ррівняння
до
М,Δ-структури
Нехай вхідними сигналами будуть сигнали w і v, а вихідними - z і y,
тобто систему з параметричною або структурною невизначеністю можна
представити як двомірну (рис. 4б) і визначити передавальні
функції  ,
,  ,
,
 ,
,  .
.
З урахуванням позначень на рис.4a) легко отримати відповідні передавальні функції, а саме:
 ;
;
 ;
;
 ;
;
 .
.
З
іншого
боку на
підставі матричного рівняння (рис. 4в) можна записати наступні
співвідношення, враховуючи, що
 :
:
Розв`язком рівнянь відносно y і w є співвідношення (2)
 ,
(2)
,
(2)
яке
відображає передавальну функцію замкненої системи
з урахуванням адитивної невизначеності передавальної функції
регулятора. Для
скорочення запису останньої формули і
для спрощення представлення різноманітних
робастних систем використовується запис  , який відповідає «верхньому»
лінійному дрібному перетворенню
, який відповідає «верхньому»
лінійному дрібному перетворенню  (upper).
(upper).
На підставі рівняння (2) можна зробити важливі висновки стосовно стійкості системи автоматичного управління, у якої передавальна функція регулятора визначена з параметричними або структурними похибками (незалежно від причин, які викликали появу адитивної або мультиплікативної похибки).
Висновок 1. Якщо період дискретності
не змінюється під час експлуатації системи, то параметрична або
структурна похибки визначення передавальної функції регулятора відносно
його номінальної моделі є відсутніми
( )
[7].
У такому випадку рівняння (2) встановлює залежність виходу системи від
входу, яка дорівнює передавальної функції
)
[7].
У такому випадку рівняння (2) встановлює залежність виходу системи від
входу, яка дорівнює передавальної функції  замкненої
системи. Характеристичним рівнянням є
замкненої
системи. Характеристичним рівнянням є
 ,що відповідає стійкої системі
внаслідок розумного обрання регулятору.
,що відповідає стійкої системі
внаслідок розумного обрання регулятору.
Висновок
2. При наявності адитивної
похибки ()
стійкість системи визначається складовою  ,
якої відповідає додатковий контур з позитивним зворотним зв`язком.
Характеристичне рівняння для оцінки стійкості має вигляд
,
якої відповідає додатковий контур з позитивним зворотним зв`язком.
Характеристичне рівняння для оцінки стійкості має вигляд
 .
(3)
.
(3)
Передавальну функцію  можна представити у вигляді добутку передавальної функції
об`єкту
можна представити у вигляді добутку передавальної функції
об`єкту  і чутливості номінальної
системи
і чутливості номінальної
системи  ,
тобто
,
тобто  .
У частотній області характеристичне рівняння (3) для
забезпечення стійкості системи
перетворюється у вираз
.
У частотній області характеристичне рівняння (3) для
забезпечення стійкості системи
перетворюється у вираз
 для
для
 .
(4)
.
(4)
Враховуючи
те,
що
абсолютна
величина  є
обмеженою
зверху,
тобто
є
обмеженою
зверху,
тобто
 ,
критерій
стійкості
(4) можна
представити
у
формі
(5):
,
критерій
стійкості
(4) можна
представити
у
формі
(5):
 ,
(5)
,
(5)
або суворіше
 .
(6)
.
(6)
Останній
вираз за визначенням відповідає
- нормі :  , тому критерієм стійкості є також
, тому критерієм стійкості є також
 .
(7)
.
(7)
На
підставі, наприклад, критерія стійкості
(7) легко перевірити, чи буде замкнена
система стійкою, якщо період
дискретності стане вдвічі більшим. Так,
розглянувши логарифмічну частотну
характеристику  ,
яка наведена на
рис. 5, можна зробити висновок, що система
залишається стійкою, тому що
,
яка наведена на
рис. 5, можна зробити висновок, що система
залишається стійкою, тому що  < .
< .
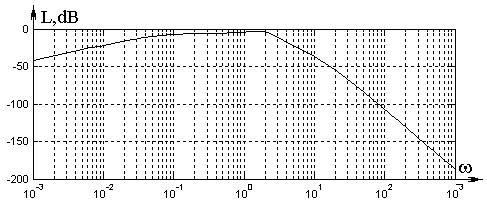
Рисунок
5 – Значення критерію стійкості (7)
Структура
регулятору може бути складнішою і містити два і більше блоків ділення
на T, (наприклад у ПІД-регуляторі з паралельною
структурою). У такому випадку необхідно
кожний блок ділення заміняти на еквівалентну структуру, блоки  об`єднуються в один багатомірний блок
з діагональними елементами . Відносно цього блоку остання частина
системи розглядається як багатомірна замкнена система. Очевидно, що для
стійкості багатомірної системи також повинна виконуватись умова
об`єднуються в один багатомірний блок
з діагональними елементами . Відносно цього блоку остання частина
системи розглядається як багатомірна замкнена система. Очевидно, що для
стійкості багатомірної системи також повинна виконуватись умова  ,
де
,
де  -
передавальна функція від i-го виходу
блока до j-го входу.
-
передавальна функція від i-го виходу
блока до j-го входу.
Висновки
Задачу аналізу впливу змінного періоду дискретності на стійкість замкненої системи удається звести до задачі оцінки робастної стійкості. Зміна періоду дискретності веде до того, що змінюється власна динаміка регулятору, тобто змінюється його передавальна функція. Відхилення від номінальної передавальної функції регулятору представляється як адитивна похибка (невизначеність), яку можна розрахувати шляхом використання білінійного перетворення. З використанням критеріїв (4) - (7) перевіряється стійкість системи автоматичного управління.
Використання
лінійного дрібного перетворення
для представлення змінного періоду дискретності дозволяє оцінювати
стійкість замкненої систем при його певному збільшенні або розрахувати
його допустиму величину при збереженні стійкості системи. У випадку,
якщо структура регулятору містить два і більше блоків ділення на ,
необхідно кожний з них представити структурою як на рис. 6б, і
об’єднати блоки
у один багатомірний блок з діагональними елементами .Відносно цього блоку остання
частина системи розглядається як багатомірна замкнена система, для
стійкості якої повинна виконуватись умова
.
Результати даного дослідження можна застосовувати для обґрунтування вимог до пропускної спроможності мережі, а також для визначення максимально допустимої затримки в передаванні інформації від датчиків до регулятору і від нього до виконуючого механізму в мережевих системах автоматичного управління.
Список джерел
- Артемьев В.М., Ивановский А.В. Дискретные системы управления со случайным периодом квантования. – М.: Энергоатомиздат, 1986. - 96с.
- Grobe M. Ein Ansatz zur Stabilitätsuntersuchung von Systemen mit nicht konstanter Abtastung : 2009 - 144. Режим доступа: http://rzbl04.biblio.etc.tu-bs.de:8080/docportal/servlets/MCRFileNodeServlet/DocPortal_derivate_00008028/Druckversion_20091203.pdf
- G.C. Walsh and Y. Hong and L.G. Bushnell. Stability Analysis of Networked Control Systems. IEEE Transactions on Control Systems Technology, 10(3):438–46, May 2002.
- Ray A, Galevi Y. Intergrated communication and control systems: Part II – design considerations. J Dyn Syst Measurement Contr 1988; 110: 374–381.
- J.K. Yook, M.Tilbury, and N.R. Soparkar. Trading Computation for Bandwidth: Reducing Communication in Distributed Control Systems Using State Estimators. IEEE Transactions on Control Systems Technology, 10(4):503.
- W. Zhang and M.S. Branicky and S.M. Phillips. Stability of Networked Control Systems. IEEE Control System Magazine, 21(1):84–99, February 2001.
- P. Seiler and R. Sengupta. Analysis of Communication Losses in Vehicle Control Problems.Proceedings of the American Control Confrence, p.1491–1496, June 2001.