Авторы: Manel
Velasco, Pau Marti, Rikard Milla,
Josep M. Fuertes, Jordi Ayza, Miquel Monroig.
Источник: Department
of Automatic Control and Computer
Engineering Technical University of Catalonia Pau Gargallo 5, 08028
Barcelona, Spain, {manel.velasco, pau.marti, ricard.villa,
josep.m.fuertes, jordi.ayza}@upc.edu.
Abstract: In
real-time multitasking systems, feasible periodic tasks execute within
their periods. However, the exact time at which each task executes vary
due to other task interferences. For control tasks, this produces
irregular sampling and varying time delays, which may degrade system
performance and bring the system to instability. In this paper we
present stability conditions that allow us to evaluate if a closed-loop
system designed to work at a nominal sampling period  with a nominal time delay
with a nominal time delay  will remain stable if the run-time sampling is not strictly periodic
and time delays vary randomly. In the closed-loop system model, we
consider the irregular sampling and the varying time delays as random
variables with known expectation. With this model, the system evolution
can be seen as a sequence of random state vectors generated by the
system closed-loop matrix. Then, we derive stability conditions for the
system in terms of convergence of a sequence of random variables.
will remain stable if the run-time sampling is not strictly periodic
and time delays vary randomly. In the closed-loop system model, we
consider the irregular sampling and the varying time delays as random
variables with known expectation. With this model, the system evolution
can be seen as a sequence of random state vectors generated by the
system closed-loop matrix. Then, we derive stability conditions for the
system in terms of convergence of a sequence of random variables.
Copyright
2005 IFAC.
Keywords:
Real-time systems, Timing jitter,
Random variables, Probabilistic models, Stability tests.
1.
INTRODUCTION
In real-time multitasking systems,
feasible periodic
tasks execute within their periods. However, the exact time at which
each job executes vary due to other task interferences. That is,
real-time systems allow jitter in task executions as far as feasibility
constraints are met. In such systems, controllers are often implemented
as periodic tasks, where at each job execution, sampling, control
algorithm computation and actuation are sequentially performed. In this
context, variability in jobs execution produces sampling and latency
jitter (Arzen et al., 2000), which may degrade control system
performance and even bring the system to instability (Marti et al.,
2001b).
Recently, several works combining
control and
scheduling co-design approaches have focused on the jitter problem
(e.g., (Cervin, 1999) and (Marti et al., 2001a)). Their main goal has
been to minimize the degrading effects that jitter in control tasks
introduces in the performance of control systems. This is achieved by
computing and switching controllers according to the run-time jitters.
In addition, several tools have been presented for simulation and
performance analysis of real-time control systems (e.g. (Henriksson et
al., 2002) and (Lincoln and Cervin, 2002)). However, none of the
previousworks focused on control systems stability (although stability
issues were considered).
Looking at stability and the jitter
problem for
control tasks, in (Marti et al., 2001c), a sufficient stability
condition was presented for analysing closed-loop systems where control
tasks subject to jitter adapt their gains at run time (i.e., switching
controllers). Necessary and sufficient stability conditions that can be
also applied in these scenarios can be found in (Dogruel and Ozguner,
1995) or (Liberzon et al., 1999). However, the application of these
conditions requires previous knowledge of the exact jitter values that
each control task will be subject to at run time. And for some
application scenarios, this may not be known previously or could be
impossible to predict due to the dynamics of the real-time multitasking
system. In these cases, the application of these stability criteria
fails and new criteria are required.
The application of the stability
criteria we present
does not require knowing the exact jitter values, but their
distribution. Our approach is based on modelling the irregular sampling
and varying time delay as random variables with known expectation. With
this model, the evolution of the system can be seen as a sequence of
random state vectors generated by the system closed-loop matrix. Then,
we derive stability conditions in terms of convergence of a sequence of
random variables. Results are illustrated using simulated examples.
In addition, the stability criteria we
present do not assume switching controllers at run-time. We let the system run a
single discrete-time controller designed assuming a constant sampling
period
and a constant (or zero) time delay
. The stability tests we present can be used to analyse whether the
closed-loop system will remain stable if the run-time sampling is not
strictly periodic and time delays are not constant.
2. THE JITTER PROBLEM
In this section we briefly review the
jitter problem
that may arise in real-time multitasking systems, which may result in
random sampling and varying time delays for control systems.
In real-time scheduling, controllers are
usually
implemented using the periodic task model. A periodic task is seen as a
successive execution of jobs. The  job of a feasible periodic task fulfils the following constraints: it
has to execute within its period, which starts at
job of a feasible periodic task fulfils the following constraints: it
has to execute within its period, which starts at  and finishes at
and finishes at  (where T is the task period), and has to complete before or at
time +D,
where D is its relative deadline (provided
(where T is the task period), and has to complete before or at
time +D,
where D is its relative deadline (provided  ,
where C is the task worst-case execution time). This means that each
job will start and finish its execution within an interval of D time
units (usually D = T), but no assurances can be made on the exact start
and completion time of each job execution because of the interference
of other tasks executions.
,
where C is the task worst-case execution time). This means that each
job will start and finish its execution within an interval of D time
units (usually D = T), but no assurances can be made on the exact start
and completion time of each job execution because of the interference
of other tasks executions.
A common way of coding classically designed controllers using the
periodic task model is to set each control task
period T equal to
the sampling period used in the
controller design
stage (with D=T). Sampling and actuation
are assumed to
take place when each
job starts and completes its execution respectively. With this
assumption, the
allowed variability in
jobs executions results in random sampling and varying time delays.
This is problematic because control actions are
calculated with
respect to the assumptions on regular
sampling and
constant time delay that were made in the
controller design
stage.
Example 1 illustrates the jitter phenomena of real-time multitasking
systems and its
influence on the control signal for a
generic controller.
Example
1. Let us
consider a real-time multitasking system with three control tasks, as
specified in Table 1 (where periods P, deadlines D and worst-case
computation times C are given in seconds).
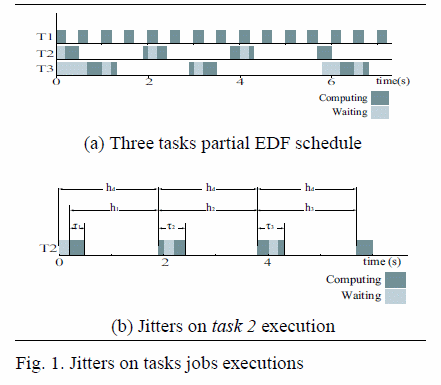
Figure 1
(a) shows a partial feasible schedule of the three tasks (during 7s,
approximately) if the task set is scheduled using the optimal
priority-based scheduling algorithm earliest deadline first (EDF) (Liu
and Layland, 1973). For each task, dark grey symbolizes jobs
executions, which may be blocked (symbolized in light grey) due to the
interference of other tasks executions. These interferences, which are
allowed as far as schedulability constraints are satisfied, cause
jitter in jobs execution.
Looking for example at the sequence of jobs of task 2 (Figure 1 (b)),
we have that the time interval between consecutive jobs start execution
times, i.e., sampling period, takes different values. And the time
elapsed from each job start execution time to its completion time,
i.e., latency or delay, also varies. In fact, the task was assigned a
period of hd = 1:9s (because this value was used in the controller
design stage), but at run-time, the real sampling period varies in the
vicinity of 1:9s, taking values at 1:7s, 1:9s and 2s. In addition, in
the controller design a delay of 0:3s was accounted for, but at
run-time, the real latency varies, taking values of 0:3s but also of
0:5s.
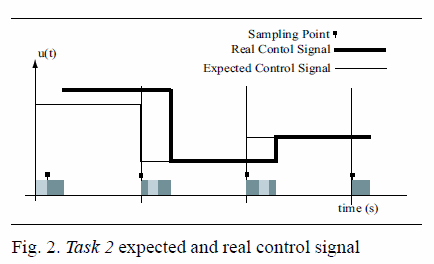
Figure 2 shows the evolution of the
control signal
for each job execution. In fact, it shows the evolution of the expected
control signal (thin line, corresponding to a classically designed
controller executing in isolation, that is, without jitters) and the
real control signal (thick line) for the same controller if implemented
in task 2 in the multitasking real-time system . In Figure 2, let us
suppose for example that a perturbation affects the system controlled
by task 2 just before time 0. The first sampling that would detect that
the controlled system is not in equilibrium (due to the perturbation)
should occur at time 0. But due to a start time delay, sampling occurs
0:2s later. Therefore, the sampling will read a greater value
(corresponding to a greater deviation of the controlled system with
respect to its equilibrium point) than it should. Consequently the real
control signal will be stronger (higher valued) than the expected one,
because it will try to correct a greater deviation. Therefore, the
evolution of the controlled system will not be the expected one. We
don’t know if the system will remain stable as it would do if
the
controller would execute in isolation, without suffering jitters.
By treating these jitters as random
variables, this
paper presents a new (to the authors knowledge) probabilistic approach
to the stability analysis of control systems subject to sampling and
latency jitter.
3. PROBLEM FORMULATION
In this section we present the system
model we use
to derive the stability criteria.We then define the problem to be
analysed for the stability analysis, and without losing generality, we
reduce the system model that we consider in order to simplify notation.
3.1 System model
A linear discrete-time control system
with time delay (where the delay is less than or equal to the sampling period)
can be described by equation (1), where xn is the state
vector,  and
and  are the current and past control signals, and
are the current and past control signals, and are
the system and input matrices that depend on the sampling period h and
time delay t (Astrom and Wittenmark, 1997).
are
the system and input matrices that depend on the sampling period h and
time delay t (Astrom and Wittenmark, 1997).

Consider
that the sampling period h and time delay t
are independent random variables with known expectation but the control
signal u is given by a controller designed to work at a constant
sampling period
with a constant time delay .
The new closed-loop system dynamics can be described by (2),
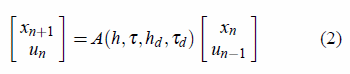
where  is
the closed-loop matrix next specified in (3). In (3),
is
the closed-loop matrix next specified in (3). In (3),  is the feedback gain.
is the feedback gain.

To clarify the
notation, the closed-loop matrix (3) can be further detailed as in (4).
3.2 Problem definition
The closed-loop system given by (2) may
become
instable because control signals are not appropriate according to the
system dynamics. Control signals u are computed according to the
feedback gain L, that was designed assuming a constant sampling
period
and a constant time delay
. However, the run-time system evolution is discretely driven by random
variables h and t , which take unexpected but bounded values
at
each iteration.
To focus on the stability of the
closed-loop system
given by (2), we analyse the convergence of the sequence of state
vectors that it generates. To do so we use known concepts of
convergence of sequences of random variables (Grimmett and Stirzaker,
2001). Note that looking at (2) we have to study which conditions the
generated sequence of random state vectors x1; :::;xn has to fulfil in
order to converge towards a random vector x = 0.
Henceforth, convergence will refer to
convergence in
mean (recall that convergence in mean implies convergence in
probability (Grimmett and Stirzaker, 2001)). We say that the sequence
Xn converges in mean towards X, if  ,
and:
,
and:
where the operator E
denotes the expectation. Therefore, to establish stability conditions
for the closed-loop system given by (2), we will focus on studying the
convergence in mean of the sequence of state vectors xn towards x. That
is,
In fact, if the
equilibrium point is zero (without losing generality), then, we study
In order to establish
convergence criteria, we shall look at the sequence given by E(jxnj).
If such sequence converges towards zero, then, the sequence of state
vectors will converge in mean. Therefore, the closed loop system
specified in (2) will be stable.
4. CONCLUSIONS
We have discussed why in the application
scenario of
real-time control systems (where controllers are subject to scheduling
induced jitters), existing stability criteria may not be applicable. To
overcome this applicability problem, in the closed-loop system designed
to work with regular sampling and assuming a constant time delay, we
have modeled the jitter effects on the sampling and controller latency
as bounded random variables. Then, we have derived stability conditions
in terms of convergence of the random state vectors generated by this
new model. Using this stability test has the advantage of obtaining a
closer result to real situations.
Future work will focus on using the
stability
conditions for the design of more flexible and adaptive schedulers.
REFERENCES
1. Arzen, Karl-Erik, Anton Cervin, Johan
Eker and Lui Sha (2000). An introduction to control and scheduling co-design. In: Proceedings of the 39th IEEE Conference of Decision and Control. Sydney, Australia.
2. Astrom, Karl J. and Bjorn
Wittenmark (1997).
Computer-Controlled Systems. Third Edition. Prentice–Hall.
3. Cervin, Anton (1999). Improved
scheduling of control
tasks. In: Proceedings of the 11th Euromicro Conference on Real-Time
Systems. York, UK.
4. Dogruel, M. and U. O¨
zgu¨ner (1995).
Stability of a set of matrices: A control theoretic approach. In:
Proceedings of the 34th IEEE Conference of Decision and Control.
5. Grimmett, Geoffrey and David Stirzaker
(2001).
Probability and Random Processes. Third Edition. Oxford University
Press.
6. Henriksson, Dan, Anton Cervin and
Karl-Erik Arzen
(2002). Truetime: Simulation of control loops under shared computer
resources. In: 15th IFAC World Congress on Automatic Control.
Barcelona, Spain.
7. Lancaster, Peter and Miron
Tismenetsky (1985).
The Theory of Matrices. Second edition. Academic Press.
8. Liberzon, D., J.P. Hespanha and A.S.
Morse (1999).
Stability of switched systems: a lie-algebraic condition. Systems
Control Letters 37, 117–122.
9. Lincoln, Bo and Anton Cervin (2002).
Jitterbug: A
tool for analysis of real-time control performance. In: 41st IEEE
Conference on Decision and Control. Las Vegas, NV.
10. Liu, C. L. and James W. Layland (1973).
Scheduling
algorithms for multiprogramming in a hard-realtime environment. Journal
of the Association for Computing Machinery 20(1), 46–61.
11. Marti, Pau, Josep M. Fuertes, Gerhard
Fohler and
Krithi Ramamritham (2001a). Jitter compensation for real-time control
systems. In: Proceedings of the 22nd IEEE Real-Time Systems Symposium
(RTSS 2001). London, Uk.
12. Marti, Pau, Ricard Vill`a, Josep M.
Fuertes and
Gerhard Fohler (2001b). On real-time control tasks schedulability. In:
European Control Conference. Porto, Portugal.
13. Marti, Pau, Ricard Vill`a, Josep M.
Fuertes and
Gerhard Fohler (2001c). Stability of on-line compensated real-time
scheduled control tasks. In: IFAC Conference on New Technologies for
Computer Control. Hong Kong, China.