Микропроцессорная система управления скоростью движения ленты конвейера
Автор: Бухаров Р.А., Дмитриева В.В.
Источник: Электронный Научный вестник Московского государственного горного университета
http://vestnik.msmu.ru/...
Автор: Бухаров Р.А., Дмитриева В.В.
Источник: Электронный Научный вестник Московского государственного горного университета
http://vestnik.msmu.ru/...
Бухаров Р.А., Дмитриева В.В. Микропроцессорная система управления скоростью движения ленты конвейера В данной статье показана реализация системы управления скоростью ленточного конвейера, в которой в качестве объекта управления используется модель, реализованная в программном пакете МаtLab, параметры которой в определенной степени соответствуют параметрам реальной технологической установки. Управление осуществляется посредством алгоритмов, работающих на контроллере. Для передачи данных служит технология ОРС.
Из-за неравномерной работы добычных участков ленточные конвейеры, эксплуатируемые на шахтах и рудниках, часто не используются на проектную мощность, а доля холостых, или близких к ним режимов, составляет значительную часть рабочего времени.
Таким образом, одним из важнейших параметров, влияющих на производительность, надежность и экономичность конвейерной установки, является скорость движения ленты. Регулирование этого параметра может достигаться применением специальных приводов и системы автоматического регулирования скоростью ленты посредством изменения момента привода в зависимости от поступающего на конвейер грузопотока. Данная система может быть как автономной, так и входить в состав комплексной АСУТП.
Опыт эксплуатации ленточных конвейеров подтвердил, что для снижения затрат электроэнергии, уменьшения износа транспортерной ленты, роликов и става конвейера наиболее эффективным средством является применение частотно-регулируемого электропривода, который позволяет регулировать скорость движения ленты в зависимости от фактической загрузки конвейера. Применение частотно-регулируемого электропривода для управления приводными станциями ленточных конвейеров обеспечивает:
В общем случае, система с частотно-регулируемым приводом обеспечивает регулируемый запуск, регулирование рабочего процесса в автоматическом режиме и регулируемый останов конвейера.
Это позволяет отказаться от гидромуфт скольжения, обеспечивает плавный запуск ленточных конвейеров без проскальзывания ленты, исключает ударные нагрузки в приводе, в тяговом органе и нагрузки на электросеть.
В работе предполагается реализация компонента АСУТП ленточного шахтного конвейера, отвечающего за регулирование скорости конвейерной ленты в зависимости от случайного входного грузопотока, а также обеспечивающего плавное изменение скорости ленты при пуске и переключении с одной скорости на другую.
В настоящей работе не ставится задача разработки полномасштабной АСУТП управления конвейером, а предполагается программно реализовать разработанные ранее алгоритмы управления на определенных платформах. В качестве конвейера предполагается использование математической модели, реализованной в программном пакете MatLab, параметры которой в определенной степени соответствуют параметрам реальной технологической установки.
В работе исследуются возможности и целесообразности реализации ранее разработанных алгоритмов управления на реальных аппаратных платформах с применением программного обеспечения, как входящего в состав исследуемых платформ, так и разработанного специально.
Данные исследования позволят:
В работе используются следующие программные средства: приложения Simulink (как среда моделирования) и OPCToolbox (обеспечение интерфейса с OPC-сервером) пакета прикладных программ Matlab; OPC-сервер (универсальное средство, обеспечивающее передачу данных между контролером и средой моделирования); Step7 Microwin (разработка алгоритмов управления, программирование контроллера). Общая структурная схема представлена на рис. 1.
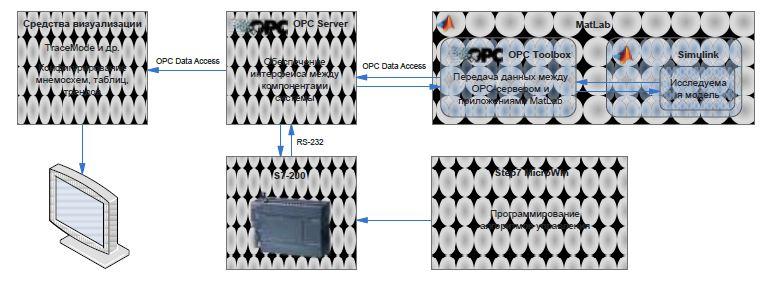
Рисунок 1 – Общая структурная схема
ОРС-сервер является основным компонентом, обеспечивающим передачу данных между средой моделирования, контроллером и внешними программами. Любой сигнал Simulink-модели может быть передан на сервер и, соответственно, может быть передан в контроллер или в любое приложение, поддерживающее стандарт OPC.
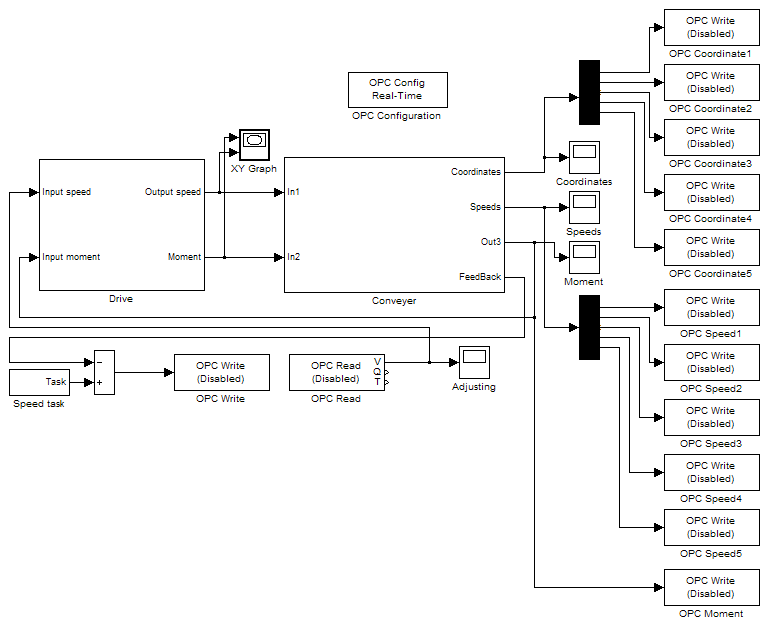
Рисунок 2
В качестве контроллера выбран Siemens Simatic S7-200 CPU222. Данное устройство широко распространено в промышленности, имеет удобную среду разработки алгоритмов управления, легко соединяется с компьютером через com-порт, драйверы для работы с контроллером поддерживаются большинством разработчиков OPC-серверов.
Для исследований выбран одноприводный ленточный конвейер с натяжным устройством и асинхронным короткозамкнутым приводом, расположенным в головной части конвейера.
Модель конвейера разработана доцентом кафедры автоматики и управления в технических системах Дмитриевой В. В. в работе «Разработка и исследование системы автоматической стабилизации погонной нагрузки магистрального конвейера».
Модель реализована в приложении Simulink как совокупность функциональных блоков библиотеки Simulink и связей между ними. Модель конвейера состоит из двух составляющих: десятимерной модели конвейера и модели привода. На рис. 2-4 показаны функциональные схемы модели и ее составляющих. Модель состоит из следующих подсистем:
Также в модели имеется блок OPC configuration, который предназначен для настройки связи с OPC-сервером. Данный блок позволяет выбрать один из работающих в локальной сети серверов, а также настроить параметры передачи данных. Блоки OPC Read и OPC Write предназначены для получения и отправки данных на сервер соответственно.
Контроллер через средства, предоставляемые OPC-сервером, получает от модели сигнал ошибки, формируемый как разность задания скорости (сигнал от Speed Task) и скорости привода (выход Feedback подсистемы конвейера).
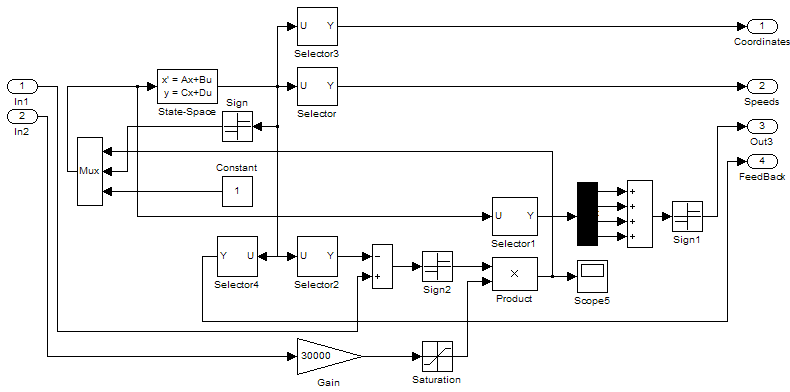
Рисунок 3
От контроллера модель получает управляющий сигнал, сформированный по определенному алгоритму (ПИД-регулирование, оптимальное управление и др.). В модели предусмотрены 11 блоков, передающих данные о моменте привода, координатах и скоростях десяти сосредоточенных масс на OPC- сервер. Благодаря этому доступ к этой информации может получить любое приложение, работающее со стандартом ОРС. Это позволяет осуществлять мониторинг технологического процесса в реальном времени – разработать мнемосхемы, тренды, таблицы, а также формировать базу данных, информация которой может использоваться для диагностики технологического процесса, определения причин аварийных ситуаций или расчета технико-экономических показателей.
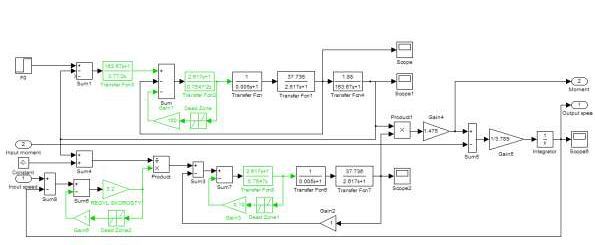
Рисунок 4
1. Дмитриева В. В. Разработка и исследование системы автоматической стабилизации погонной нагрузки магистрального конвейера. – 2006.
2. Ткалич В.М., Ткалич С.А. Проектирование АСУ на базе компонентов Simatic, ч.1. Обзор компонентов.
3. Документация по SIMATIC, Siemens 2005.