Назад в библиотеку
Моделирование системы векторного управления асинхронным электродвигателем с короткозамкнутым ротором
Автор: Иванов А.С., к.т.н., доц. Кунинин П.Н.
Источник: Сибирский государственный индустриальный университет г.Новокузнецк / Наука и молодежь: проблемы, поиски, решения: Труды Всеросийской научной конференции студентов, аспирантов и молодых ученых / Под общей редакцией Л.П. Мышляева; СибГИУ. – Новокузнецк, 2008. – Вып. 12. – Ч.V. Технические науки. – с. 22-25.
http://library.sibsiu.ru/DATA/...
Первоначально асинхронный электродвигатель с короткозамкнутым ротором (АКЗ) применялся в системах, где не требовалось регулировать скорость. Однако первые исследования, направленные на возможность использования АКЗ в системах с регулированием скорости, позволили перейти на частотно-управляемые системы, основанные на методе скалярного управления.
Недостаток метода – малый диапазон регулирования скорости. Но метод показал возможность регулирования скорости АКЗ н способствовал к переходу на надежный и в тоже время дешевый электродвигатель, не требующий особых условий эксплуатации.
Проводимые теоретические исследования показывали возможность создания принципиально новых систем управления, основанных на теории векторного управления, что позволило бы эффективно производить управление скоростью и потокосцеплением АКЗ.
Переход на более совершенные системы управления с глубоким регулированием скорости АКЗ потребовал резкого увеличения модулей системы для математических расчетов и обработки сигналов. Стоимость системы векторного управления многократно превышала стоимость системы со скалярным управлением.
С развитием микропроцессорной техники задача по реализации надежной н дешевой системы векторного управления значительно упростилась, т.к. современные выпускаемые микроконтроллеры, предназначенные для управления электроприводами, включены все необходимые модули: АЦП. ШИМ. сигнальный процессор.
Таким образом, для того чтобы эффективно управлять АКЗ. в настоящее время, не требуется больших денежных вложений на систему управления, а требуется разработать более совершенный алгоритм программы микроконтроллера. Требуется разработать цифровую систему управления асинхронным короткозамкнутым электродвигателем для последующего создания лабораторного стенда, с целью замены материально и морально устаревшего, существующего оборудования на кафедре.
При построении высококачественного асинхронного электропривода с векторным управлением требуется на стадии проектирования качественно оценить преимущества и недостатки будущей системы управления, определить параметры системы.
Цель настоящего исследования – разработать компьютерную модель системы векторного управления АКЗ с подчиненным регулированием для определения оптимальных параметров системы при дальнейшем программировании микроконтроллера.
Для создания компьютерной модели, использовался математический пакет MatLab v6.0 (The Math Work. inc.).
Модель системы подчиненного регулирования представлена на рисунке 1.
Для придания системе требуемых качеств синтезированы регуляторы, как в канале стабилизации потока, так и в канате регулирования скорости.
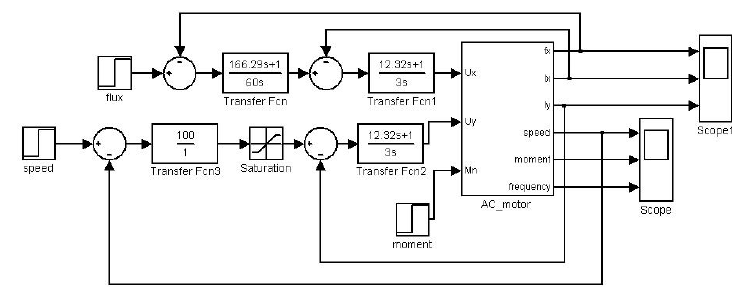
Рисунок 1 – Система векторного управления асинхронным двигателем с подчиненным регулированием
Блок AC_motor (рисунок 2) представляет собой упрощенную виртуальную модель асинхронного электродвигателя.
Предварительно проведенные математические операции позволили преобразовать 3-х фазный АД в эквивалентный 2-х фазный АД и перейти от синусоидальных величин к постоянным, благодаря введению результирующих векторов и вращающейся системы координат. Таким образом, система векторного управления АД схожа с системой управления двигателем постоянного тока.
На вход модели подаются постоянные значения напряжений Ux и Uy. На выходе модели измеряются значения скорости, момента и частоты вращения ортогональной системы координат.
Физические величины на выходе Transfer Fon и Transfer Fonl представляют собой значения токов Ix и Iу, а на выходе Transfer Fon2 потокосцепление ротора.
В модели (рисунок 2) учтено насыщение двигателя (блок Saturation). Для того чтобы избежать деления на ноль в начале моделирования добавлена малая постоянная (блок Constant).
Переходные процессы скорости ротора и электромагнитного момента изображены на рисунке 3.
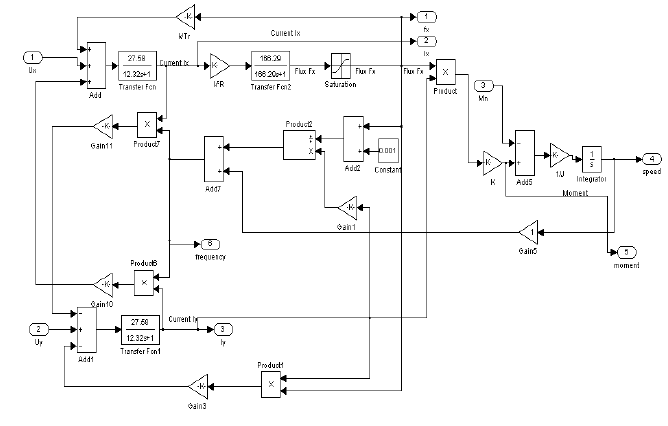
Рисунок 2 – Виртуальная модель АКЗ
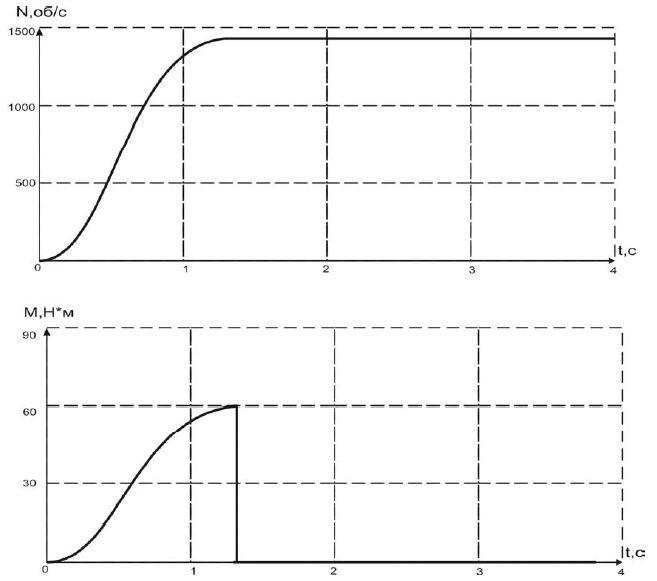
Рисунок 3 – Осциллограммы скорости ротора и электромагнитного момента на валу АД
Таким образом, создана модель системы векторного управления АКЗ с подчиненным регулированием, которая достаточно точно отражает протекающие электромагнитные процессы при векторном управлении. На основании модели определены коэффициенты регуляторов для дальнейшего программирования микроконтроллера.
Список использованной литературы
1. 1. Башарин A.B., Новиков В.А.. Соколовский Г Г. Управление электроприводами. – Л.: Энергоиздат. 1982. – 392 с.
2. 2. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие – СПб. Корона принт. 2001. – 320 с., ил.
3. 3. Юпочев В.И. Теория электропривода: Учебник для вузов. – М.: Энерго- атомиздат. 1985. – 560 с.
4. 4. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. 2006 г.