Назад в библиотеку
К обоснованию рационального информационного параметра для защиты скребковой цепи конвейера от перегрузок
Автор: Терентьев Д. Ю., Маренич К. Н.
Источник: Автоматизація технологічних об’єктів та процесів. Пошук молодих: ХIІ міжнар. наук.- техн. конф., зб. наук. праць – Донецьк: ДонНТУ, 2012. – С.228-230.
Скребковый конвейер является многофункциональной транспортной установкой, поскольку применяется не только для перемещения горной массы из очистного забоя шахты, но и служит базой для перемещения очистного комбайна. Такие специфические условия эксплуатации конвейера вызывают частые стопорения его тягового органа, что приводит к порывам цепи и обусловливает необходимость создания соответствующей защиты. При этом, защитное устройство не должно существенно усложнять конструкцию электропривода.
ДВ связи с изложенным, практический интерес представляет выяснение свойств известных способов выявления стопорения привода конвейера:
• по интенсивности изменения угловой скорости двигателя;
• по интенсивности изменения тока потребляемая двигателем.
Структура компьютерной модели объекта представлена на рис. 1
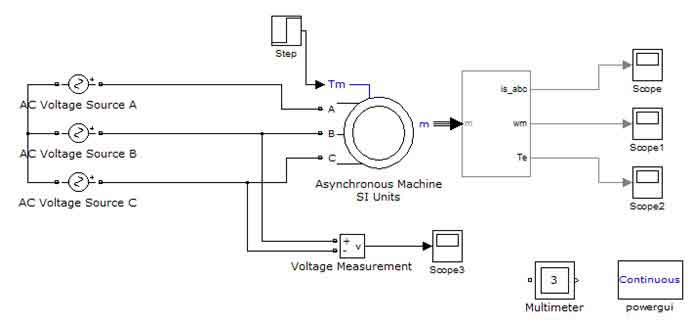
Рисунок 1 – Структурная модель асинхронного двигателя скребкового конвейера [1].
Основу модели составляет блок Asynchronous Machine SI Units в котором заданы параметры конкретного асинхронного двигателя. Кроме этого, компьютерная модель содержит источник трехфазной ЭДС с параметрами, соответствующими трансформатору комплектной подстанции участка шахты.
Данная структура позволяет моделировать электромеханические параметры привода (в частности, параметры угловой скорости и тока двигателя) при разных уровнях момента сопротивления. Его величина задается функциональным блоком Step. При этом, возможности модели позволяют изменять величину момента сопротивления как скачкообразно, так и плавно (последовательным ступенчатым увеличением уровней нагрузки в течение заданного интервала времени).
Результаты моделирования представлены в виде диаграмм параметров на рис. 2. Их анализ позволяет сделать вывод о неприемлемости использования сигнала о величине потребляемого тока в качестве информационного, поскольку скорость изменения тока при скачкообразном увеличении нагрузки на валу двигателя существенно отстает от параметра снижения угловой скорости вала двигателя. Следовательно, устройство защиты скребкового конвейера от динамических перегрузок должно быть ориентировано на использование датчика скорости в качестве устройства формирования информационного параметра.
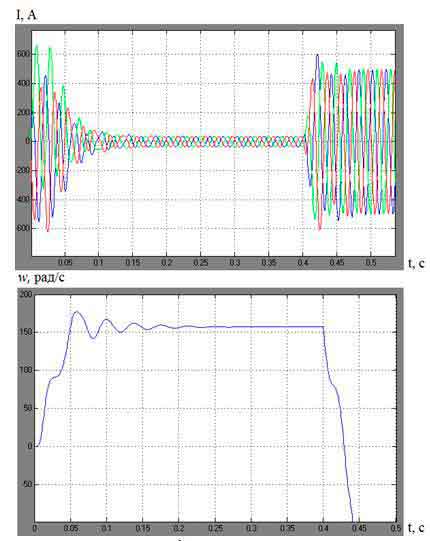
Рисунок 2 – Диаграммы изменения фазных токов и угловой скорости асинхронного двигателя при скачкообразном увеличении момента сопротивления в 10 раз в момент времени t1=0,4 с.
Список использованной литературы
1. Лазарев Ю. Моделирование процессов и систем в MATLAB. Учебный курс.–СПб.: Питер; Киев: Издательская группа BHV, 2005.–512c.: ил.