Особенности применения встраиваемых специализированных систем
Авторы: Лютый Е.В., Бондини С.С., Обионву Виктор
Источник: Информатика и компьютерные технологии-2011 / Матерiали II мiжнародної науково-технiчної конференцiї студентiв, аспiрантiв та молодих вчених. — Донецьк, ДонНТУ — 2011, с. 67-69.
Введение
Любая механическая или электрическая система, которая имеет в своем составе устройство управления, выполненное на основе вычислителя, называется встраиваемой системой (Embedded System). Встроенные вычислительные системы непосредственно взаимодействуют с объектом контроля или управления и, как правило, объединены с ним единой конструкцией. Такие системы имеют специальное назначение, и выполняет одну или несколько определенных задач, обычно с очень конкретными требованиями. Большинство современных встраиваемых систем выполняется на основе микроконтроллеров (МК) – вычислителей, все функциональные блоки которых объединены на одном полупроводниковом кристалле. Конструктивно МК представляет собой одну интегральную схему большой степени интеграции.
Встраиваемые систем на основе МК окружают нас со всех сторон. На рисунке 1 изображены общественные системы, которые просто не могли бы существовать без встраиваемых систем.
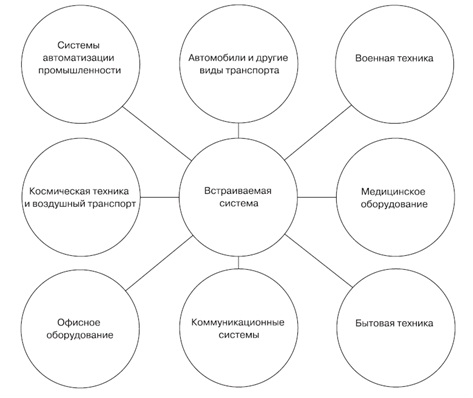
Рисунок 1 – Применение встраиваемых систем в различных сферах жизни
Относительно простые МК находят применение в бытовой технике и игрушках. Наиболее сложные высокопроизводительные МК используются в коммуникационном оборудовании. Для управления самолетами и военной техникой. Современный человек не смог бы и часа прожить без них. Будильник, телефон, карманный компьютер, кофеварка, телевизор, стиральная машина, холодильник – все эти устройства не смогли бы работать без встраиваемых систем на микроконтроллерах.
На борту орбитальных космических станций и спутников считают и управляют встраиваемые системы. Любой современный станок и измерительный прибор – это тоже встраиваемая система. Большинство сложных медицинских диагностических комплексов использует для обработки результатов встраиваемые системы.
Функциональная организация встроенной системы привода робота
В данном проекте разрабатывается автономный робот, который мог бы проходить через неизвестный лабиринт. Робот должен двигаться через лабиринт, находя стенки лабиринта с помощью инфракрасных (ИК) локаторов (пар излучатель-приемник), и принимая решения, продвигаться вперед или назад, чтобы продолжить путь через лабиринт.
Конструкция робота приведена на рис.2.
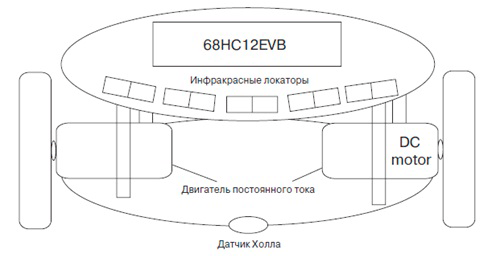
Рисунок 2 – Конструкция робота
Корпус его состоит из двух легких связанных вместе алюминиевых платформ. На нижней платформе расположены два двигателя постоянного тока, приводящие в движение два больших колеса, установленных с обеих сторон корпуса. При использовании этой конструкции с двумя колесами, робот может управляться подобно танку. То есть, чтобы выполнить поворот по часовой или против стрелки на двигатели подаются сигналы. Два маленьких ролика с обеих сторон от робота используются, чтобы обеспечить его равновесие и устойчивость. Находясь в покое, робот опирается на три точки. На верхней платформе установлены пять ИК пар излучатель-приемник, которые позволяют роботу обнаружить стенки прямо перед собой и с любой стороны от корпуса. Верхняя платформа содержит также отладочную плату с микроконтроллером 68HC12, которая используется, чтобы принимать входные сигналы, вырабатывать решения, основанные на этих сигналах, и формировать сигналы управления двигателями для реализации этих решений. На нижней пластине робота установлен датчик Холла, позволяющий обнаруживать магнитные «мины».
При своем движении робот должен также избегать «мин» (магнитов), скрытых в полу лабиринта. Робот обнаруживает «мины» с помощью датчика Холла. Если робот обнаруживает «мину», то он останавливается, дает задний ход и объезжает ее. Предназначение робота состоит в том, чтобы проходить через лабиринты, избегая столкновения со стенками и контакта с «минами», скрытыми в полу. Робот едет вперед, когда на оба двигателя поступает одинаковое постоянное напряжение. Когда робот движется вперед с помощью двигателей постоянного тока, он непрерывно проверяет свое положение относительно стенок и магнитов с помощью пяти ИК локаторов и датчика Холла. ИК-сигналы, поступающие от источников отражаются от стенок обратно на приемники. Если робот приближается к стенке, то ее присутствие обнаруживается соответствующим ИК локатором. Например, если робот приближается к углу, расположенному с правой стороны (рис.3), то передняя стенка обнаруживается передним локатором, а правая – правым локатором. Робот затем отвечает на принятые им входные сигналы, поворачивая влево, чтобы избежать столкновения со стенками.
Требования к программно-аппаратному обеспечению
Чтобы робот выполнял все поставленные для него задачи, программно-аппаратное обеспечение должно обеспечивать следующие функции:
- аналого-цифровое преобразование выходных сигналов ИК-датчиков;
- сравнение сигнала датчика ИК-излучения с пороговым уровнем, соответствующим обнаружению стенки;
- создание алгоритма поворота робота, позволяющего определить, в каком направлении он должен повернуть в ответ на сигналы ИК-датчиков;
- разработка функций управления приводом, осуществляющих движение робота вперед и назад и повороты влево или вправо;
- создание механизма для обработки выходных сигналов датчика Холла;
- обеспечение функции, позволяющей останавливаться, давать задний ход и обходить обнаруженную мину;
- отображение выполняемых функций на символьном ЖК индикаторе.
Реакция датчиков на близлежащие стенки отображена на рис.3.
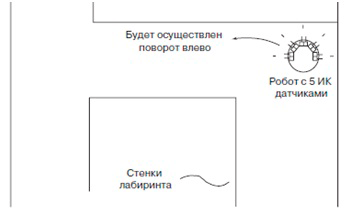
Рисунок 3 – Реакция датчиков на близлежащие стенки
Выбор компонент системы
В качестве МК используется семейство микроконтроллеров 68HC12 [2]. Его подсистемы, применяемые в данном проекте включают в себя АЦП – для оцифровки сигналов инфракрасных датчиков и датчика Холла; модуль ШИМ для модуляции ширины импульса. Также необходимо обеспечить интерфейс сопряжения МК с ЖК-дисплеем, сопряжение МК с ИК-датчиками, сопряжения МК с датчиком Холла, интерфейс драйвера двигателя. В паре ИК излучатель-приёмник объединены источник и приёмник инфракрасного излучения. Источником является светоизлучающий диод с соответствующей схемой, а приёмником – фототранзистор, чувствительный к ИК-диапазону излучения с собственной схемой, показанной на рис.4.
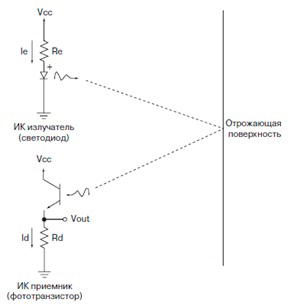
Рисунок 4 – Пара излучатель-приёмник – ИК локатор
Датчики Холла используют эффект Холла, чтобы генерировать напряжение, пропорциональное напряжённости обнаруженного магнитного поля. В данном проекте используется простой датчик с тремя выводами HAL114 фирмы Micronas, схема включения которого содержит два резистора R, RL и конденсатор C, как и показано на рис.5.
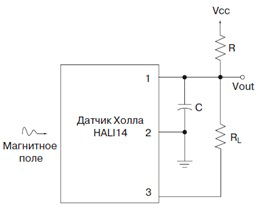
Рисунок 5 – Датчик Холла HAL114 фирмы Micronas
Список использованной литературы
1. С.Ф. Барретт, Д.Дж. Пак. Встраиваемые системы на микроконтроллерах семейства 68HC12/HCS12. Москва, 2007.
2. А.О. Ключев, Д.Р. Ковязина, П.В. Кустарев, А.Е. Платунов. Аппаратные и программные средства встраиваемых систем. Санкт-Петербург, 2010.