Назад в библиотеку
Исследование
формы функции принадлежности нечетких контроллеров оптимизации
Тао Wu1, Zhenhai Gao1, B и Ян you1, C1
Государственная лаборатория автомобильного моделирования и управления
университета Цзилинь, Чанчунь, Китая
32151020@163.com, b1264415075@163.com,
cYy08@163.com
Первод выполнила магистр ДонНТУ Степанова Анастасия
Источник(англ.): [Перейти]
Ключевые слова: адаптивный круиз-контроль, нечеткие самонастройки
контроллера, функция принадлежности, частиц, swarm оптимизации.
Абстрактная.
Поскольку трудно определить нечеткую параметров контроллера, который
должен соответствовать тест сложных нелинейных автомобиля динамические
характеристики. На основании роя частиц алгоритм оптимизации,нечетких
самонастройки параметров регулятора оптимизации разработан метод.
Контроллер восстанавливали использованием частиц рой оптимизации,
которые могут случайно выбранных значений в значении диапазон форму
точки функции принадлежности в много раз. И чтобы отслеживать цель.
Функция как лучше, форма функции принадлежности задачи оптимизации
нечетких самонастройки контроллера решена. Результаты моделирования
показывают, что оптимизированный контроллер имеет хорошие показатели
управления,которые могут получить параметры регулятора с помощью роя
частиц методом оптимизации.
Инструкция
Адаптивный круиз-контроль (ACC) является распространенной
и хорошо известной автомобильной системы помощи водителю.Опираясь на
радар, он может автоматически регулировать скорость для того, чтобы
поддерживать безопасный успехов. Расстояние между передними
транспортные средства в той же полосе движения [1].
В последнее время
многие ACC алгоритмы управления были представлены. Первоначальный ACC
алгоритма управления основные виды эквивалентного метода линеаризации
для представления нелинейных систем. На основе линейного эталонной
модели, линейные стратегии управления, например, PID, предназначена
[2]. Этот метод может стать лучше. Точность
управления на малой
скорости, потому что динамические характеристики автомобиля в линейной
области. Но это становится очень неточной со скоростью растет. Для того
чтобы лучше решить автомобиль сильно нелинейных. Динамика проблемы,
исследователи представляет нечеткого управления и интеллектуального
алгоритма управления для ACC [3]. Тем не менее,
очень трудно установить
хорошее динамическое и устойчивое состояние характеристики нечеткого
регулятора, потому что различные испытания транспортных средств владеть
различными нелинейными и сложными характеристиками, и в настоящее время
все еще не имеют простого и эффективного проектирования и настройки
параметров метода.Роя частиц алгоритм оптимизации, полученные из
изучения поведения хищных птиц, которые является своего рода алгоритм
стохастической оптимизации на основе интеллекта роя [4].В
данной
работе, так как трудно определить нечеткие самонастройки параметров
контроллера для. Адаптивный круиз-контроль, которые должны
соответствовать сложной нелинейной испытание автомобиля динамические
характеристики, поэтому функций принадлежности нечетких самонастройки
метода оптимизации контроллера разработан на основе роя частиц алгоритм
оптимизации, который может эффективно уменьшить работу по
соответствующие адаптивные системы круиз-контроля и обеспечения высокой
производительности управления для испытания транспортного средства.
Имитировал поведение водителя АКК. Через изучение
водитель характеристики управляемости поведения, работе [5]
разработана
модель драйверов, который имитирует поведение водителя. Так на основе
устойчивого драйвера предварительного просмотра и динамической
калибровки. Гипотеза, ACC система устанавливается и показаны на рисунке
1. Это может быть разделена на информацию идентификация,
предварительный просмотр принятия решений и управления коррекцией. В
работе [6], основанный на классической нечеткого
контроллера, роман
нечеткой самонастройки алгоритм управления ACC устанавливается, и это
параметров контроллера может быть настроена в режиме онлайн на основе
оценки индексов, которые могут описать, как водитель учитывать качество
динамическую характеристику автомобиля продольной динамики.Алгоритм
управления блок-схема показана на рисунке 2.

Рисунок
1 –
Диаграмма систем (слева)
Рисунок
2 –
Контроллер блока диаграмм (справа)
Контроллер имеет два входа и один выход. Входные параметры ошибки
и
ошибок между оптимальными ускорения просмотра и фактического ускорения
и выходного параметра приращение педали акселератора или тормоза. EK
является добротность электронной ошибки ускоритель, CEK является
добротность ускорителя ошибок является добротность педали U
приращения. через анализ, начальное значение из трех параметров
контроллера выбрана, которые 4, 4 и 6.
Оптимизация
функций принадлежности нечетких самонастройки контроллера
Так как функции принадлежности контроллер имеет важное влияние
на производительность контроллера и это очень трудно определить форму
функции принадлежности. Так оптимизации членства. Функции контроллера с
помощью роя частиц оптимизации разработан метод, который можно
оптимизации функции принадлежности форму контроллер вводит для
упрощения конструкции контроллера. ACC алгоритма моделирования
окружающей среды модели. Carsim и Simulink моделирования совместной
программы АКК алгоритм построен и показан на рисунке 3. Carsim модуль
представляет динамическую модель транспортного средства,Принятие
решений модуля и модуля управления коррекции создана в Simulink. И
целевая функция частицы алгоритм оптимизации роя минимальную
погрешность между идеаломускорение и фактическое ускорение. Весь
процесс оптимизации схематично представлена на рисунке 4.
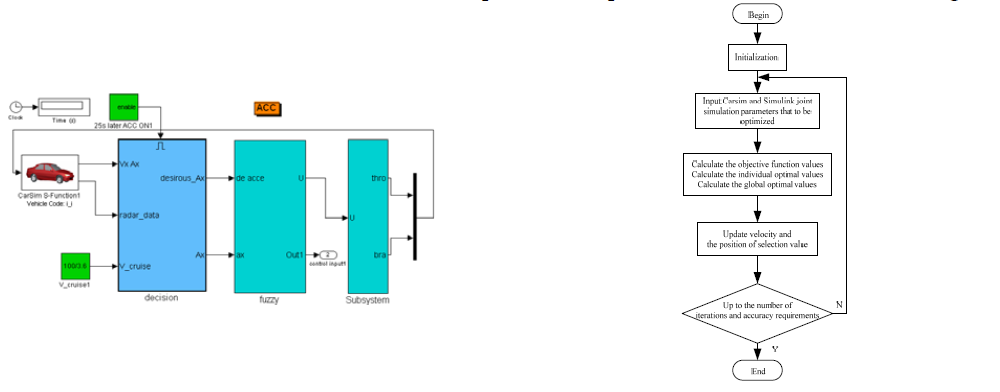
Рисунок
3 –
Система программы (слева)
Рисунок 4 –
Примитивные процесс программы (справа)
Алгоритм параметров
конфигурации.
Параметр имеет следующие параметры в роя частиц. Оптимизация
алгоритма.Максимальное число итераций установлен на 800, а количество
первичных частиц 24. По форме функции принадлежности, количество
оптимизированных параметров 20,так что начальная матрица 24 строк и 20
колонок. Ускорение параметр установлен в 2 терминал. Порог алгоритм
1E-25.Диапазон параметров оптимизации может соответствующий выбор
основан по их первоначальной стоимости.
Типичные условия
оптимизации процесса.
Принимая во внимание общий уровень скорости и типичные условия системы
АКК, оптимизированные условия эксплуатации устанавливаются следующим
образом, постоянной скоростью передней части транспортного средства 80
км / час. И хостинг автомобиля с постоянной скоростью 100 км / ч.
Постепенно близко к передней части транспортного средства. Тогда радар
обнаруживает передний автомобиль, автомобиль замедляется хостинг вниз и
имеет ту же скорость, с передней части транспортного средства на
следующие состояния. Передний разрез транспортного средства в другую
полосу в 40-х годах, поэтому хостинг Разгон до крейсерской скорости,
которая установлена в 100 км / ч.время моделирования 80-х.
Оптимальные
результаты и анализ.
Оптимизированные функции принадлежности формыускорение ошибки Е и
ускорением погрешности показаны на рисунке 5, 6.
 Рисунок
5 –
Оптимизация процесса (слева)
Рисунок
5 –
Оптимизация процесса (слева)
Рисунок 6 –
Оптимизация функции процесса (справа)
Моделирование.
Низкой и высокой скорости уровне типичных условий эксплуатации,
принятых для проверки производительности оптимизированный контроллер.
Результаты моделирования двух контроллеров сравнивают до и после
оптимизации.
Моделирование
низкоскоростных рабочих условиях.
В начальный существует передней части транспортного средства таким же
полосу с ACC автомобиля, но расстояние между двух автомобилей выходят
за рамки радиолокационных обнаружения, которые 500м. Начальная скорость
автомобиля хостинг 40км / ч, а крейсерская скорость установлена в60
км / час. В передней части с постоянной скоростью в 30 км / ч в
начальной, и начинает ускоряться в 70-х годах которые постоянно
ускоряться от 30 км / ч до 60 км / час 150S. Тогда постоянно
замедляться до 50 км / ч.в 150S после движении с постоянной скоростью
60 км / час 100s. Наконец, перед транспортное средство перемещается на
постоянной скоростью 50 км / час. Результаты моделирования системы АКК
управления транспортного средства приведены врис. 7.8 при этом условии.
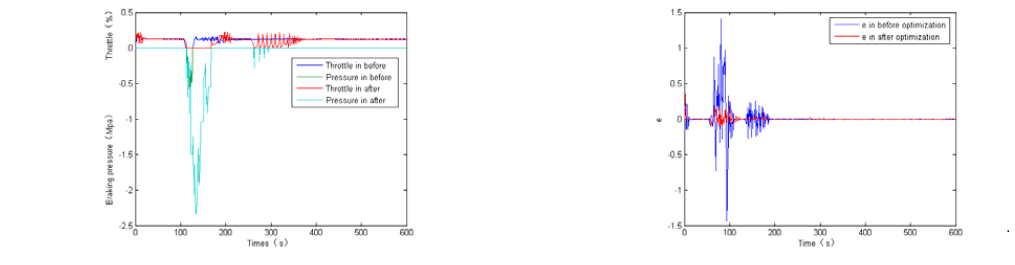 Рисунок
7 –
Сравнение кривой throle степени и тормозное давление (слева)
Рисунок
7 –
Сравнение кривой throle степени и тормозное давление (слева)
Рисунок 8 –
Сравнение кривой Е в низких скоростных условиях эксплуатации (справа)
Это видно из фигуры 7, как до,
так и после оптимизации контроллера может достичь цели и эффект
регулирования скорости в низкоскоростном рабочем состоянии. Тем не
менее, оптимизированные. Кривые дроссельной степени и давление в
тормозной системе являются более стабильными и менее колебательный и
гладкой в управление скоростью в процессе стабильного следующие и
круиз-контроль. И оптимизированный кривых. Степень газа и тормоза
давление колеблется больше, и тормоза и управления дроссельной
заслонкой часто переключаться для достижения хорошего следующую
особенность, когда транспортное средство находится хостинг бесплатный
проезд и следует передней части транспортного средства с изменением
скорости. Это видно из фигуры 8, оптимизированный контроллер управляет
более стабильной.
Моделирование
высокоскоростного рабочем состоянии.
В начальных, есть передний автомобиль по той же полосе с ACC
автомобиля, но расстояние 1000м. Начальная скорость автомобиля хостинг
100 км / ч,и крейсерской скорости установлен на 150 км / час. В
передней части с постоянной скоростью 110 км / ч в начальной и начинает
ускоряться в 70-х годах, которые постоянно разгоняться от 110 км / ч до
150 км / ч в 150S, затем постоянно замедляется до 140 км / ч в 150S
после движении с постоянной скоростью 150 км / ч в 100s.Наконец,
передние транспортное средство движется с постоянной скоростью 140 км /
час. Результаты моделирования приведены в изображение 9-10. Это также
можно увидеть оптимизированный контроллер управляет более стабильным,
тем лучше.
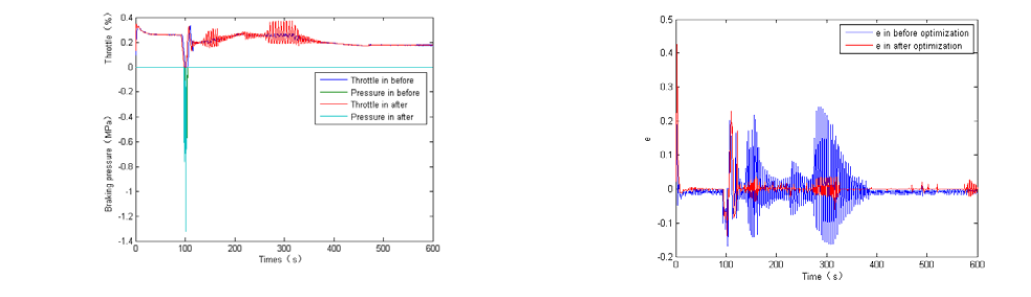 Рисунок
9 –
Сравнение кривой thottle степени и тормозное давление (справа)
Рисунок
9 –
Сравнение кривой thottle степени и тормозное давление (справа)
Рисунок 10 –
Сравнение кривой е в высокоскоростных условиях эксплуатации (слева)
Заключение
В
этой работе на основе роя частиц алгоритм оптимизации, нечеткие
самонастройки контроллера оптимизации параметров разработан метод,
который может решить проблему, которую трудно определить параметры
регулятора, которые должны соответствовать сложный нелинейный тест
автомобиля динамические характеристики. Через частицу метода
оптимизации роя, треугольник членства. Функция формы входа нечеткой
самонастройки контроллера предназначена. Результаты моделирования
показывают,что предложенный метод является эффективной и
оптимизированной нечеткой самонастройки контроллер имеет улучшенный
производительность.
Литература:
[1]
Brackstone M: Car-following: a historical review[J]. Transportation
Research Record(1999), 2(4):181~196.
[2]
Kazuo T, Hua O. Wang: Fuzzy Control Systems Design and Analysis: A
Linear Matrix Inequality Approach (Wiley Publications, New York 2001).
[3]
Guan H, Wang J W, Gao Z H: An Acc Control Algorithm Based on Driver
Behavior Model[J]. Automotive Engineering, 2004051.
[4]
Shi Y, Eberhart R: A modified particle swarm optimizer[A]. Proceedings
of the 1998 IEEE.
[5]
Guan H, Gao Z H: A Driver Direction Control Model and its Application
in the Simulation of Driver-Vehicle-Road Closed-Loop System[J]. SAE
paper, 2000-01-2184.
[6]
Gao Z H, Guo J: A Fuzzy On-Line Self-Tuning Control Algorithm for
Vehicle Adaptive Cruise Control System with the Simulation of Driver
Behavior[J]. SAE paper, 2009-01-1481.