Зондове діагностування слабопослідовних схем за методологією «веденого зонда»
Автор: Деменко А. Г., Зінченко Ю. Є.
Источник:
Автор: Деменко А. Г., Зінченко Ю. Є.
Источник:
Важливою складовою експлуатації обчислювальної техніки завжди було технічне обслуговування, зокрема діагностування, пошук та усунення несправностей. На даний час в сучасних цифрових пристроях все частіше застосовується контролепридатне проектування, яке дозволяє автоматизувати тестування і пошук несправностей.
Для широкого застосування діагностики необхідний оптимальний алгоритм пошуку несправностей (АПН), але його немає. Це пояснюється трудомісткістю та складністю розробки таких алгоритмів. В галузі систем зондової діагностики (ЗД) залишається невирішеним ряд проблем, серед яких в першу чергу слід виділити проблеми мінімізації перестановок зонда (тобто тривалості процесу діагностики), локалізації несправності з точністю до знімною компоненти та проблему мінімізації зовнішньої пам’яті системи ЗД.
Актуальним є пошук рішень цих проблем з метою отримання досить універсального алгоритму пошуку несправностей.
Мета роботи – розробити алгоритм зондового пошуку несправностей для цифрових схем, з урахуванням технологічних особливостей «реальних» схем, та оптимізувати його по середній кількості перестановок зонда [1].
Метод пошуку несправності (МПН), який реалізує алгоритм пошуку несправності (АПН), використовує граф пошуку несправностей (ГПН), що визначає послідовність зондування ключових точок (КТ), залежно від стану схеми [1-2]. Граф пошуку несправності будується за описом схеми.
Вершини ГПН підрозділяються на чотири типи: початкову, проміжні, контрольні і кінцеві. Мітки початкової, проміжних і контрольних вершин складаються з одного елементу і є символічними позначеннями КТ, які перевіряються в процесі зондування. Початкова вершина символізує КТ (контакт вихідного або двонаправленого роз’єму), в якій була вперше зафіксована несправність ОД і в підсхемі якої виконуватиметься пошук несправності. Проміжні вершини позначають КТ, які необхідно прозондувати. Контрольні вершини використовуються для запам’ятовування інформації про те, що КТ вже була прозондована, що дозволяє виявити кільця в схемі, в яких неможливо встановити несправний елемент. Якби контрольні вершини були відсутні, то складно було б визначити, що КТ вже зондувалася, оскільки довелося б шукати всі проміжні вершини з однаковими мітками і позначати їх. Кінцева вершина графа символізує закінчення пошуку несправності по одній з гілок графа; мітка вершини містить повідомлення, яке описує припущено джерело несправності, виражене множиною з одного або декількох елементів ОД. Множина міток контрольних вершин співпадає з множиною міток проміжних вершин. Ця множина складається з символічних позначень всіх КТ схеми. Кожної КТ відповідає рівно одна контрольна вершина, а відповідних проміжних вершин може бути декілька [3].
З проміжних вершин ГПН завжди виходитимуть дві дуги, помічені символом R1 = ‘N’ і R2 = ‘Y’, ототожнювані з результатом зондування КТ, відповідній даній вершині. Дуга з міткою ‘Y’ позначає перехід у разі збігу реальної ТР КТ з еталонною, дуга з міткою ‘N’ - перехід у разі неспівпадання реакцій. По дузі з міткою ‘Y’ можна перейти в іншу проміжну або в кінцеву вершину. По дузі з міткою ‘N’ завжди виконується перехід в контрольну вершину, мітка якої співпадає з міткою проміжної вершини. Початкова і контрольна вершини завжди мають одну витікаючу дугу з міткою ‘N’, по якій виконується перехід в проміжну або кінцеву вершини. Дуги з міткою ‘Y’ називаються Y-дугами, а з міткою ‘N’ – N-дугами.
Послідовність вершин ГПН, зв’язана дугами, що починається початковою вершиною і закінчується однією з кінцевих вершин, символізує порядок зондування контрольних точок ОД за наявності в останньому несправності, описуваною кінцевою вершиною і при виникненні в ньому ТР, описуваних відповідними дугами. Кількість проміжних вершин такої послідовності відображає число перестановок зонда, яке необхідно здійснити для виявлення несправності, описуваною кінцевою вершиною послідовності. Граф в цілому задає алгоритм пошуку всіляких несправностей ОД [2].
ГПН може бути легко представлений для машинної обробки. У системі ЗД такий граф можна задавати за допомогою текстового файлу, для чого розроблений спеціальний формат структури файлу. Експериментальні дослідження показали, що розмірність такого файлу порівняно не висока і пов’язана з об’ємом ОД прямо-пропорційною залежністю [3].
Основною характеристикою АПН є середнє число перестановок зонда (матема- тичне очікування), яке необхідно виконати для виявлення середньостатистичної несправності ОД. Ця характеристика може бути легко розрахована за допомогою ГПН, що також є одним з його достоїнств.
Використання ГПН в представленій інтерпретації по суті зумовлює в цілому стратегію пошуку несправностей об’єкту ЗД [3-4].
Схема, що діагностується, складається з чотирьох компонент (рис. 1). Схема є комбінаційною (КС) або слабопослідовною (псевдокомбінаційною – ПКС), оскільки в ній відсутні глобальні зворотні зв’язки. В алгоритмі «веденого зонда» використовується опис тільки структури схеми, а функціональність, реалізована кожним компонентом, значення не має. Компоненти схеми та їх виходи пронумеровані. Вхідні і вихідні псевдокомпоненти позначаються великими літерами [4].
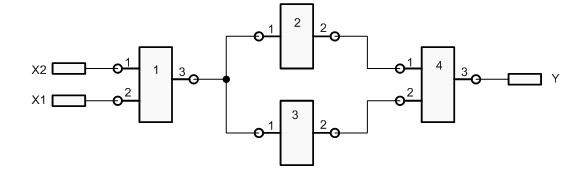
Рисунок 1. Схема, що діагностується
На рис. 2 приведений ГПН для наданої схеми. Вершини позначені кухлями, усередині яких знаходяться мітки. Ребра позначені стрілками, їх мітки пишуться поряд. Початкова і контрольні вершини обведені, щоб відрізняти їх від проміжних і кінцевих вершин. У якості мітки проміжних і контрольних вершин використовуються номер компонента і номер його виводу, розділені через крапку, що однозначно визначає КТ схеми. Початкова вершина як мітку має позначення вихідного псеводокомпонента. У кінцевих вершинах, якщо несправний компонент, ставитися буква ‘К’ і номер компоненту, а якщо несправна ЛС, то буква ‘Л’ і мітка КТ, до якої дана ЛС підключена.
У роботі запропонований поліпшений АПН за методологією «веденого зонда», зокрема, з можливістю виділення з об’єкта діагностики блоків з локальними зворотними (замкнутими) зв’язками. Це, в свою чергу, дозволить сприймати групу елементів з локальними зворотними зв’язками як псевдоелемент. Таким чином, ОД буде псевдокомбінаційною, а не складно- або слабопослідовною схемою.
Для наочності розглянемо приклад на рис. 3. Наведена комбінаційна схема подібна до схеми на рис. 1, але в ній замість елемента 2 розташований RS-тригер. Тригер складається з елементів 5 та 2 - групи елементів, які мають локальні зворотні зв’язки. Схема є слабопослідовною. Її можна перетворити на псевдокомбінаційну, замінивши тригер на еквівалентний псевдоелемент, що виконує аналогічну функцію. Отримана псевдокомбінаційна схема буде аналогічною до схеми з рис. 1, її ГПН - аналогічним до рис. 2. Він є значно простішим та вимагає меншу кількість перестановок зонду, ніж складний ГПН для схеми з рис. 3.
Для пошуку несправності в отриманій псевдокомбінаційній схемі можна застосувати алгоритм GALOP, який вимагає меншу кількість перестановок зонда, ніж SCAN, що застосовується у схемах зі зворотними зв’язками. Якщо несправність була виявлена в псевдоелементі, то очевидно, що вона в групі елементів зі зворотними зв’язками. Для цієї групи буде застосовуватися вже алгоритм SCAN.
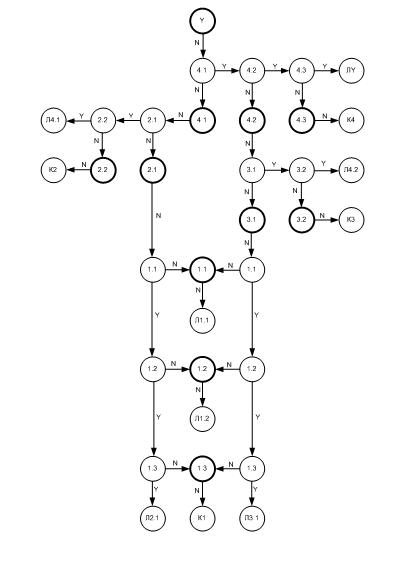
Рисунок 2. ГПН для схеми, що діагностується
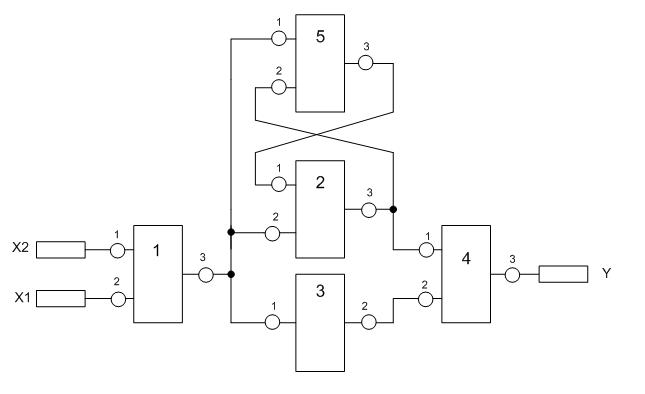
Рисунок 3. Слабопослідовна схема, що діагностується
Робота в позначеному напрямку пов’язана з розробкою і тестуванням АПН по методу «веденого зонда», з особливою увагою до пошуку і заміні груп елементів з локальними зворотними зв’язками на еквівалентні псевдоелементи.
Був розгянутий приклад побудування ГПН як для слабопослідовної схеми, так і для аналогічної псевдокомбінаційної. Необхідна подальша розробка та тестування АПН на реальних схемах.
Якщо розроблений алгоритм буде досить вдалим, то його використання в ЗД принесе значну вигоду в часі тестування обчислювальних пристроїв, інтегральних схем та іншої техніки, що потребує діагностики.