Abstract
Anopriyenko A., Kryvosheyev S. The ship motion simulation subsystem design. This paper presents approach of motion ship simulation. The structure of simulation subsystem is described and mathematical model of position error determination is formulated.
В настоящее время, в связи с увеличением плотности транспортных
потоков, проблема обеспечения безопасности движения представляет
собой наиболее актуальную проблему на транспорте. Одним из способов
решения проблем данного направления является создание
интеллектуальных транспортных средств [1, 2].
Интеллектуальное транспортное средство – это подвижный объект,
оборудованный датчиками, вычислительным комплексом, и системой
управления. Датчики позволяют транспортному средству «чувствовать»
путь, потенциальные опасности, и другие транспортные средства;
вычислительный комплекс обрабатывает полученную информацию и
определяет действия объекта; система управления выполняет заданные
действия. При этом транспортные средства под управлением бортового
вычислительного комплекса, в отличие от непосредственно управляемых
оператором, не подвержены стрессам, усталости и другим внешним
факторам.
Движение в транспортном потоке является сложной задачей для
интеллектуальных транспортных средств, так как рациональные решения
должны быть приняты на основе неполной информации и в режиме
реального времени. В совокупность задач, решаемых бортовым
вычислительным комплексом, входят при этом планирование траектории
движения транспортного средства и оптимальное управление
перемещением по ней. Для движения транспортного средства по заданной
траектории необходимо осуществлять контроль не только за направлением
движением, а также за координатами местоположения.
Одним из важнейших направлений интеллектуализации
транспортных средств является разработка систем автоматизированного
судовождения. Для решения задачи автономного судовождения
разрабатываются интегрированные навигационные системы (ИНС) [2,3,4],
а также системы автоматического управления движением судна [5].
Современные автопилоты, установленные на судах, не управляют
местоположением непосредственно, но только через задание курса
(направления движения). При этом автопилот использует в качестве
входных данных значение курсового угла, получаемое от гирокомпаса, и
осуществляет управление движением судна вдоль прямой. Однако, в
общем случае, например, при движении по речным фарватерам или при
интенсивном воздействии волн, течения и ветра заданная траектория
может существенно отличаться от прямой. В этом случае требуется
использование более функционально развитых систем.
Наиболее совершенными системами такого рода являются ИНС
[2,3]. В состав программного обеспечения бортового вычислительного
комплекса ИНС должны входить подсистемы моделирования различных
динамических процессов, влияющих на точность движения по заданному
маршруту. Одной из таких подсистем должна быть, в частности,
подсистема моделирования движения судна по заданной траектории.
Движение судна по заданной криволинейной траектории является
особенно важным для судов внутреннего плавания, в связи с тем, что реки
изобилуют большим количеством поворотов, изгибов и характеризуются
существенным ограниченностью ширины судового хода.
Контроль местоположения судна требует постоянного наблюдения
за двумя параметрами движения: продольной и поперечной составляющей
скорости. Таким образом, система управления движением судна по
заданной траектории во всех трех степенях свободы (при рассмотрении
только горизонтального движения) представляет собой MIMO (multiple
input, multiple output) систему.
При движении судна по заданной траектории (прямо- или
криволинейной) необходимо обеспечить минимальную ошибку между
координатами текущей точки местоположения судна и предсказанной
точкой на заданной траектории (ошибка расхождения траекторий).
Предсказание траектории движения осуществляется на основе
математической модели [3]. Для поиска минимальной ошибки
расхождения траекторий необходимо осуществлять моделирование на
модели приведенной далее.
Вектор ошибки расхождения траекторий записывается следующим образом:
где e
1, e
2 – ошибки расхождения координат.
Как показано на рис. 1, составляющие вектора ошибки зависят от
курсового угла Ψ. Вектор ошибки следования вычисляется по следующей
формуле:
e=HT(Ψ)(pd − pv), (2)
где H – матрица преобразования из связанной с судном системы координат в абсолютную (земную) систему координат:
p
d, p
v – координат точек на заданной траектории и носа судна соответственно:
ω – угловая скорость вращения.
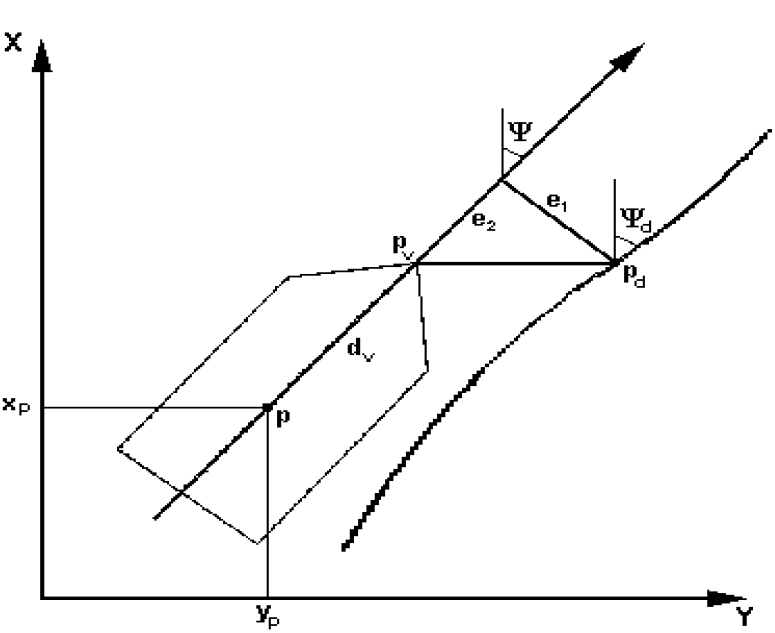
Рис. 1 – Определение ошибки расхождения траекторий
Координаты местоположения носа рассчитываются по формуле:
pv=p+H(Ψ)dv, (6)
где p – координаты центра вращения судна, d
v – расстояние между центром
вращения судна и координатами носа судна.
Таким образом, изменение ошибки выражается следующей
формулой:
Уравнение (7) используется в подсистеме моделирования динамики
судна для контроля за ошибкой расхождения между текущей и заданной
траекториями движения.
Подсистема моделирования движения судна, входящая в состав
бортового вычислительного комплекса ИНС, включает в себя, кроме
непосредственно модели движения судна [3], также подсистему контроля
ошибки расхождения траекторий. Структура данной системы приведена на
рис.2 и включает в себя следующие блоки: блок расчета ошибки
расхождения траекторий и блок расчета поправок траектории.
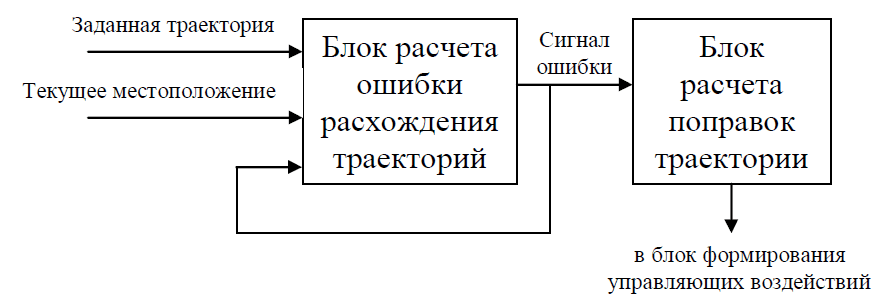
Рис. 2 Структура блока контроля за ошибкой расхождения траекторий
Блок расчета ошибки расхождения траекторий определяет значение
ошибки на основе уравнения (7). Блок расчета поправок траектории
формирует сигнал коррекции управляющих воздействий для силовых
приводов судна (рули и двигатели). Поправки вычисляются на основе
моделирования динамики судна [3], используя критерия минимального
времени возвращения судна на заданную траекторию.
Выводы
Рассмотренная подсистема контроля ошибки расхождения
траекторий легла в основу системы моделирования ИНС. Данная
подсистема позволяет учитывать внешние факторы, воздействующие на
судно во время движения, что обеспечивает стабилизацию судна при
движении по произвольной траектории. Разработка системы
моделирования ИНС выполняется в рамках договора о научном
сотрудничестве кафедры ЭВМ Донецкого государственного технического
университета с Институтом системной динамики и управления (ISR)
Штуттгартского университета (Германия).
Литература
- C.-Y. Chan, H.-S. Tan, B. Hongola. Steering Control In Vehicle-Following Collisions.
//Intellimotion, Vol. 8, №2, 1999, pp.4–7.
- M. Sandler, A. Wahl, R. Zimmermann, M.Faul, E.D. Gilles Practical Application of an
integrated Navigation System on Inland Ships. //Methods and Models for Automation and
Robotics, Poland, 1998, pp. 367–372.
- Кривошеев С.В., Потапенко В.А. Подходы к моделированию работы
интегрированных навигационных систем для судов внутреннего и смешанного
плавания //Наукові праці Донецького державного технічного університету. Серія:
Інформатика, кібернетика та обчислювальна техніка, вип. 6. – Донецк: ДонДТУ. –
1999. С.115-120.
- Святный В.А., Аноприенко А.Я., Кривошеев С.В., Потапенко В.А. Имитация
радиолокационной информации в интегрированной навигационной системе
//Сборник трудов VI международной научно-технической конференции
«Машиностроение и техносфера на рубеже XXI века». – Том 3. – Донецк. – 1999. –
с.12-15.
- T. I. Fossen, J. P. Strand. Passive Nonlinear Observer Design for Ships Using Lyapunov
Methods: Experimental Results with a Supply Vessel. //Automatica, Vol. 35, No. 1,
Januray 1999, pp. 3-16.
- Nomoto K. On steering quality of ships, International Shipbuilding Progr. 4 (35) (1957)
pp.354-370.