Введение
Использование математических моделей в контуре управления предоставляет возможность исследования и анализа различных состояний объекта, прогнозирования его поведения в зависимости от управляющих воздействий и внешних факторов, действующих на управляемый объект.
Основная идея предлагаемого метода
Предложенная модель криволинейного движения судна позволяет иметь стабильный радиус траектории корабля. Модель описывается уравнениями (1)–(3).
Пример применения предложенного метода
Пусть корабль имеет следующие характеристики: осадка T = 4 м, длина L = 80 м, ширина В = 15 м, расстояние между центром судна и движителем lr = 35 м, угол перекладки руля 20° δR = 0,349, коэффициент общей полноты δ = 0,7, начальные скорости движения составляют Vx = 5 м/с, Vy = 0 м/с, w = 0 (по осям OX, OY и угловая соответственно), корабль имеет два винта.
Модель написана на языке программирования С. Расчет осуществляется с помощью 4-го порядка точности интегрирования Рунге-Кутта.
Моделирование судна выполнено в следующих режимах: без распараллеливания, выполнение с использованием распараллеливания на 4 процессорных ядра и с использованием технологии NVIDIA CUDA. Для каждого варианта построены графики зависимости производительности от числа потоков(рис. 1).
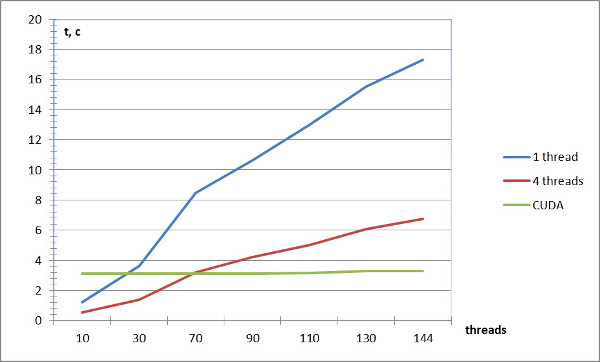
Рис. 1. Зависимость длительности процесса моделирования от количества потоков, запущенных в системе
Исследования были проведены на процессоре Intel i5-2430M процессором 2,40 ГГц(поддерживает 4 потока) и графическом процессоре NVIDIA GeForce GT 555M 144 ядер CUDA (144 потока).
Исследования показали достоверность предложенной математической модели криволинейного движения судна. Различные методы реализации модели имеют разное время обработки данных. Результаты исследований позволяют выбрать наиболее эффективный вариант обработки данных. Эта работа показывает преимущества использования технологии NVIDIA CUDA для большого количества потоков.
Список использованной литературы
1. Ivar-André Flakstad I hle / Guidance and Control / Norwegian University of
Science and Technology (NTNU) NO-7491 Trondheim, Norway. – 2006.
2. Thor I. Fossen Marine Cntrol Systems/ Norwegian University of Science and
Technology/ Trondheim, Norway. – 2002.
3. NVIDIA CUDA C Programming Guide/Version 3.1.
http://www.math.vt.edu/technology/facilities/cuda/NVIDIA_CUDA_C_ProgrammingGuide_3.1.pdf