The model of curvilinear motion of ship is proposed. It allows to stable a ship trajectory radius. The algorithm is based on empirical formulas which are getting as the result of modeling in basin. Conditions for this method’ application and example of its application are given. The experimental results are shown.
Keywords: mathematical model, ship motion, velocity, angular velocity, screw, attachment, curvilinear motion.
Introduction
Maneuvering theory: assumes that the ship is moving in restricted calm water, e.g. in sheltered waters or in a harbor. Hence, the ship model is derived for a ship moving at positive speed U under a zero-frequency assumption such that added mass and damping can be represented by using hydrodynamic derivatives.
Seakeeping analysis is used in operability calculations to obtain operability diagrams according to the adopted criteria. It also refers to the motions of a vessel in waves usually at a specific speed (included station-keeping, i.e. zero speed) and heading in a sinusoidal, irregularor random seaway – frequency-dependent added mass and damping[1].
The Principle of Guidance, Navigation and Control
Guidance: is the action or the system that continuously computes the reference (desired) position, velocity and acceleration of a vessel to be used by the control system. These data are usually provided to the human operator and the navigation system.
The basic components of a guidance system are motion sensors, external data like weather data (wind speed and direction, wave height and slope, current speed and direction, etc.) and a computer.
The computer collects and processes the information, and then feeds the results to the vessel's control system. In many cases, advanced optimization techniques are used to compute the optimal trajectory or path for the vessel to follow. This might include sophisticated features like fuel optimization, minimum time navigation, weather routing, collision avoidance, formation control and schedule meetings [1].
Navigation: is the science of directing a craft by determining its position, course, and distance traveled.
In some cases velocity and acceleration are determined as well. This is usually done by using a satellite navigation system combined with motion sensors like accelerometers and gyros.
The most advanced navigation system for marine applications is the inertial navigation system (INS).
Navigationis derived from the Latin navis, "ship", and agere, "to drive." It originally denoted the art of ship driving, including steering and setting the sails. The skill is even more ancient than the word itself, and it has evolved over the course of many centuries into a technological science that encompasses the planning and execution of safe, timely, and economical operation of ships, underwater vehicles, aircraft, and spacecraft [1].
Control is the action of determining the necessary control forces and moments to be provided by the vessel in order to satisfy a certain control objective. The desired control objective is usually seen in conjunction with the guidance system. Examples of control objectives are minimum energy, set-point regulation, trajectory tracking, path following, maneuvering etc. [2].
Main idea of proposed method
The model of curvilinear motion of ship is proposed which allows having stable radius of ship trajectory based on formulas (1)-(3):
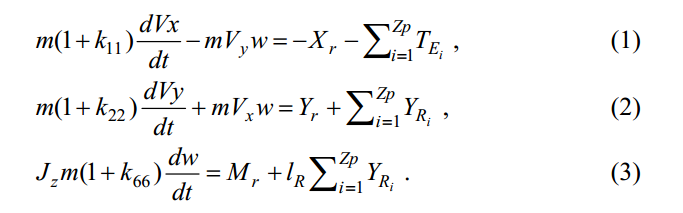
where V_x, V_y are velocities by axes X and Y;
w is an angular velocity;
m – mass of ship;
Xr, Yr, Mr – hydrodynamic hull energies;
lR – distance between center of ship and mover;
TEi – traction of mover by axis X;
YRi – traction of mover by axis Y;
Zp – number of movers;
Jz – inertia momentum;
k11, k22, k66 – coefficients of associated mass on deep water.
These formulas allow determining velocities of ship with the course of time.
These variables come out from other formulas which describe geometrical characteristics of ship, side and straight pull, characteristics of screw and rudder, water resistance.
Hydrodynamic hull energies are determined by next formulas:
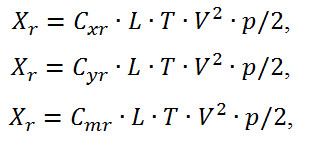
where C_xr, C_yr, C_mr – appropriate coefficients which depend on water resistance, geometrical characteristics of ship and a center gravity drift angle;
L – length of ship;
T – draught of ship;
p – density of water;
V – velocity of ship.
Inertia momentum is determined in such way:

where B – beam of ship; δ – coefficient of general fullness.
So, the model of curvilinear motion of ship can be described by formulas (1)-(3).
Example of application of proposed method
Let a ship has such characteristics:
T=4m (draught), L=80m (length), B=15m (beam), l_R =35m (distance between center of ship and mover), δ_R =0.349f (angle of rudder transposition 20̊ ), δ=0.7 (coefficient of general fullness), V_x=5m/c, V_y=0m/c, w=0 (initial velocities). It is a passenger ship, it has two screws.
Calculation are realized using 4th-Order method of integration Runge-Kutta. The language C is used.
The same model was tested on different ways. At first it was run like function. The second variant – running program in threads. It increases performance. And third variant – run this model with technology NVIDIA CUDA. For each variant elapsed time was calculated. The graphics of dependence of perfomance from number of threads were constructed. The results are shown on Figure 1.
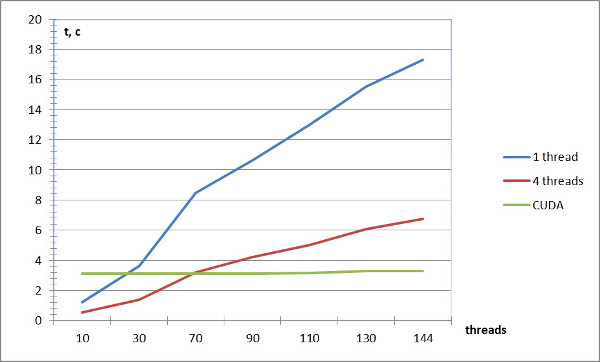
Figure 1 – dependence of elapsed time from quantity of threads running on system
The researches were made on processor Intel i5-2430M CPU 2.40GHz (4 threads available) and graphical processor NVIDIA GeForce GT 555M 144 CUDA cores (144 threads available).
Why CUDA is better
The reason behind the discrepancy in floating-point capability between the CPU and the GPU is that the GPU is specialized for compute-intensive, highly parallel computation – exactly what graphics rendering is about – and therefore designed such that more transistors are devoted to data processing rather than data caching and flow control.
More specifically, the GPU is especially well-suited to address problems that can be expressed as data-parallel computations – the same program is executed on many data elements in parallel – with high arithmetic intensity – the ratio of arithmetic operations to memory operations. Because the same program is executed for each data element, there is a lower requirement for sophisticated flow control, and because it is executed on many data elements and has high arithmetic intensity, the memory access latency can be hidden with calculations instead of big data caches [3].
Conclusion
The researchers showed that the proposed mathematical model is correct. Different systems showed different elapsed time. According these results we can choose the most effective variant of obtaining results. This work shows benefits of using NVIDIA CUDA technology.
References
1.Ivar-André Flakstad Ihle / Guidance and Control / Norwegian University of Sci-ence and Technology (NTNU) NO-7491 Trondheim, Norway, 2006.
2. Thor I. Fossen Marine Cntrol Systems / Norwegian University of Science and Technology / Trondheim, Norway, 2002.
3. . NVIDIA CUDA C Programming Guide
http://docs.nvidia.com/cuda/pdf/CUDA_C_Programming_Guide.pdf