Аннотация. В настоящее время цифровые неметрические камеры стали применяться для решения некоторых задач фотограмметрии. Ключевым моментом использования таких камер для фотограмметрических измерений является выполнение их калибровки, для чего целесообразно использовать бесплатный программный комплекс, разработанный сотрудниками лаборатории компьютерной графики и мультимедиа МГУ. Основная цель проведенных исследований — разработка методики калибровки цифровых неметрических камер с использованием данного программного комплекса, которая позволит получать параметры фотоаппаратов для последующего применения их для проведения фотограмметрических измерений.
Ключевые слова: калибровка, неметрические камеры, фотограмметрические измерения, объемный калибровочный полигон, мобильный тестовый объект, уравнения коллинеарности, наземная топографическая съемка, обмерные чертежи, элементы внутреннего ориентирования, дисторсияобъектива.
Abstract. Digital cameras non-metric now began to be applied to solve some problems of photogrammetry. Calibration non-metric of digital cameras — the main point in using these cameras for photogrammetric measurements. To solve this problem it is expedient to use a free software package developed by the laboratory staff of computer graphics and multimedia MSU. The main objective of studies - to develop a method of digital gauge nonmetric camera that uses the software package that will receive the parameters of cameras for photogrammetric measurements.
Keywords: calibration, non-metric cameras, photogrammetric measurement, volumetric calibration stand, a mobile test object, the collinearity equations, topographical surveying with a close range, drawings are compiled from measurements, the elements of inner orientation, lens distortion.
В настоящее время для решения некоторых задач фотограмметрии стали применятся неметрические малоформатные камеры. Относительно недорогие бытовые цифровые аппараты обладают хорошими радиометрическими характеристиками и позволяют получать цветные изображения, минуя фотохимический лабораторный процесс, и загружать их непосредственно в компьютер. Это и стало причиной стремления использовать такие фотоаппараты для измерительных целей.
Для фотограмметрических измерений с помощью бытовых камер необходимо выполнять их калибровку с целью получения элементов внутреннего ориентирования (фокусного расстояния и положения главной точки) и параметровдисторсии объектива.
На сегодняшний день имеется достаточно большое количество публикаций, посвященных этому вопросу. Авторами работ предлагаются различные подходы к выполнению калибровки неметрических малоформатных камер. Все подходы к решению задачи калибровки современных бытовых камер можно разделить на две основные группы: методы самокалибровки и методы непосредственно калибровки с использованием тестового объекта или калибровочногополигона.
Достаточно подробно суть предлагаемых методик самокалибровки и сравнительный анализ различных подходов изложены в работе Куркова В.М. «Методы учета систематических искажения аэроснимка. Самокалибровка».
«Суть аналитического метода самокалибровки,-как отмечает Курков В.М., -в учете систематических искажении координат аэроснимка в процессе уравнивания сети фототриангуляции, построенной по способу связок. В основе способа лежат уравнения коллинеарности. Сущность способа состоит в том, что одновременно определяются поправки к приближенным элементам внешнего ориентирования, координатам точек местности, элементам внутреннего ориентирования и суммарные поправки к координатам точек за влияние всех источников систематических ошибок». [3]
Положительным моментом методик самокалибровки является отсутствие необходимости создавать калибровочный полигон, т. к. все измерения производятся по полевым снимкам, для которых подбирается аппроксимационная модель, призванная исключить систематические ошибки из координат точек, измеренных на снимках. Но при этом способам самокалибровки присущ ряд недостатков.
Основная проблема — невозможность подбора универсальной аппроксимирующей функции не только для снимков, сделанных различными аппаратами, но и, порой, для снимков, сделанных конкретной съемочной системой. [3]
Кроме того, подобранный полином порой не позволяет учесть сложный характер распределения систематических погрешностей в координатах по полю снимка, несимметричность этого распределения.
Более эффективным и надежным является способ калибровки по классической схеме с использованием тестового калибровочного полигона. Лабораторный полигон используется компанией Vexel для калибровки широкоформатных цифровых аэрофотоаппаратов UltracamX [6] . Калибровка бытовых цифровых фотоаппаратов с использованием тестового лабораторного полигона производится в в ДонНТУ, для чего в одном из учебных кабинетов создан плоский калибровочный стенд. Для отыскания параметров калибровки камеры используется программа BlockMSG из программного комплекса DONETSKFOTO, разработанная профессором С.Г.Могильным [1].
В МИИГАИК для определения геометрических характеристик различных камер используется объемный тест-объект, состоящий более чем из 100 точек, а также специальная программа для определения параметров внутреннего ориентирования и дисторсии объектива [4].
Метод калибровки по объемному тестобъекту предлагают Р.Н.Гельман и А.Л.Дунц. Метод описан в статье «Лабораторная калибровка цифровых камер с большой дисторсией». Лабораторный способ основан на съемке с близкого расстояния тест-объекта и измерения на снимке в ручном режиме пиксельных координат точек. Дальнейшая обработка результатов измерений основывается на уравнениях коллинеарности [2].
Предлагаемые методики калибровок основаны на сравнении эталонных и действительных параметров. Измерения по снимкам с изображениями тестового полигона позволяют учесть сложный характер распределения систематических ошибок. Вычисления, основанные на применение уравнений коллинеарности логичны и понятны. Использование объемного тестового полигона позволяет провести полную калибровку аппарата, в результате которой станут известны элементы внутреннего ориентирования камеры и параметры дисторсии объектива, необходимые для последующих фотограмметрических измерений по снимкам, сделанным бытовым фотоаппаратом. Но подобные методики подразумевают построение дорогостоящего высокоточного калибровочного полигона и наличие программного комплекса, позволяющего автоматизировать процесс получения неизвестных параметров. При отсутствие последнего, калибровка станет неоправданно длительным и трудозатратным процессом. Увеличение трудозатрат приведет к увеличению стоимости проводимых работ, а это сделает бессмысленным использование неметрических камер вместо специализированной аппаратуры, т. к. применение бытовых фотоаппаратов для измерительных целей подразумевает упрощение и понижение стоимости проводимых работ. Именно трудоемкость проводимых работ, необходимость иметь оборудованную лабораторию со стабильными марками, координаты которых определены с высокой точностью, составляли основную проблему способов лабораторной калибровки. В 2005 году эта проблема стала разрешима благодаря появлению программного комплекса GML Camera Calibration Toolbox v 0.4. Авторы программы — сотрудники лаборатории компьютерной графики и мультимедиа при факультете ВМК МГУ — Велижев Александр и Вежневец Владимир. Программа является бесплатной. Она позволяет в автоматическом режиме вычислять внутренние параметры камер. Программа может использовать файлы форматов *.jpg, *.tiff, *.png, что позволяет использовать достаточно большой круг снимков со стандартными разрешениями. Результатами обработки снимков являются элементы внутреннего и внешнего ориентирования и коэффициенты дисторсии. [7]
Для выполнения калибровки требуется использовать достаточно простой в изготовлении мобильный калибровочный шаблон, представляющий собой шахматную текстуру, нанесенную на ровную поверхность (рис.1). Важен размер клетки рисунка, так как программа плохо распознаёт слишком мелкие клетки. Создатели программы рекомендуют делать клетки рисунка не менее 30 мм.
Также при изготовлении тест-объекта необходимо принять следующие рекомендации, указанные разработчиками [7]:
- Белого пространства(рис.2) между на ружной рамкой и границей объекта должно быть по ширине не менее одного квадрата.
- Все квадраты должны быть чётко видны.
- Желательно использовать при работе штатив.
- Делать не менее 25 снимков в съёмочной серии.
- При съёмке объекта стремиться заполнить его изображениями всю матрицу камеры.
- Сохранять постоянный угол наклона плоскости матрицы камеры относительно плоскости тест-объекта.
В результате проведения практических работ было выявлено, что рекомендаций, данных авторами недостаточно для успешного выполнения калибровки камеры. Поэтому по результатам проведенных экспериментов были составлены дополнения к существующим рекомендациям.
Как заявлено в инструкции по применению программы [7], при съёмке объекта необходимо стремиться заполнить его изображениями всю матрицу камеры (рис.3). Это необходимо для того, чтобы в итоге, опознанные на каждом снимке точки, находящиеся в углах схождения белых и черных квадратов (будем для удобства в дальнейшем называть их «опорными точками»), покрывали в совокупности равномерно всю площадь матрицы (рис.4). Кроме того, необходимо сохранять постоянный угол наклона плоскости матрицы камеры относительно плоскости тест-объекта. Для выполнения этих условий, авторы программного комплекса предлагают вариант съемки, показанный на рис.5.
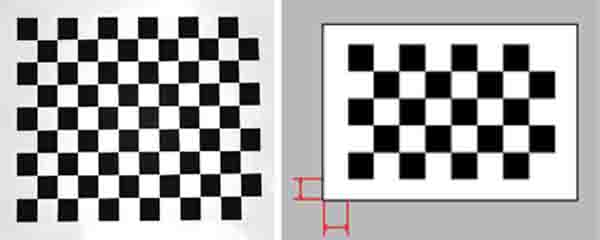
Рис. 1., Рис. 2 - Вид калибровочного шаблона
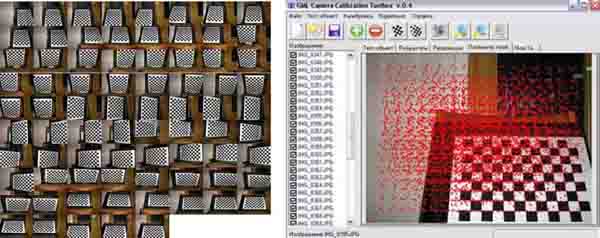
Рис. 3. Съемочная серия. Рис. 4 — Плотность точек
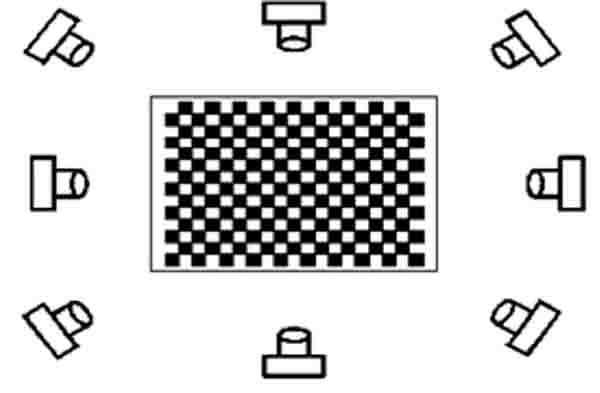
Рис. 5. Позиции фотографирования
В результате проведения подобной серии съемки, в программе будут обрабатываться варианты снимков объекта, показанные на рис. 6. Опытным путем было установлено, что на снимках типа б, г, д, е, ж, з, представленных на рисунке 6, тест-объект не распознается программой в ходе автоматического поиска опорных точек, и снимки такого типа отбраковываются при обработке.
Таким образом, для обработки остается два варианта экспозиции объекта, чего недостаточно для правильного функционирования программыпо замечанию самих авторов [7].
Это указывает, скорее всего, на то, что программа производит поиск «опорных точек» по способу построчного распознавания: при обработке снимка на нем распознается правый нижний угол тест-объекта с белым квадратом, и, по идеальным известным координатам положения точек, определяются области их поиска по строкам и столбцам. Это предположения основывается на том, что программой не распознаются изображения объекта, развернутые относительно рамок снимка под значительным углом. Поэтому при проведении калибровки аппаратов была использована иная методика съемки (рис. 7), в целом отвечающая требованиям, указанным авторамипрограммного комплекса.
При этом было выполнено основное требование съемки: сохранялся постоянным угол наклона объекта к плоскости матрицы камеры, а съемочная серия состяла при этом из снимков с восьмью различными позициями объекта.
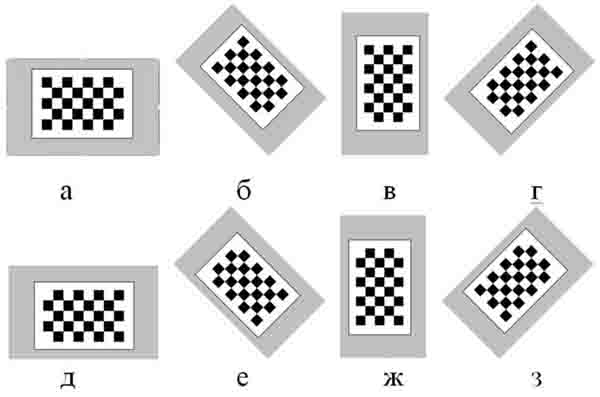
Рис. 6. Расположение изображениятест-объекта относительно рамок снимка
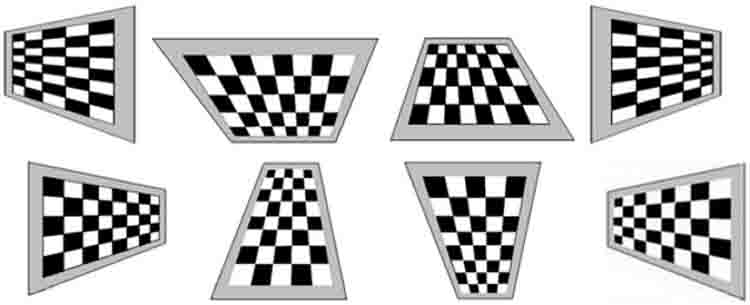
Рис. 7. Экспозиции объекта
Создатели программы рекомендуют перемещать объект относительно камеры для полного заполнения его изображениями матрицы аппарата. При выполнении работы было выявлено, что удобнее и практичнее тест объект устанавливать и закреплять под определенным углом, а перемещать саму камеру со штативом (штатив с двумя цилиндрическими уровнями для фотокамер) в плоскостях, параллельных стенду.
Опытным путем было выявлено, что программа при автоматическом поиске точек бракует снимки с изображением шахматного рисунка, расположенным под углом к плоскости снимка менее 5° (на рис. 8 показаны углынаклона тест-объекта).
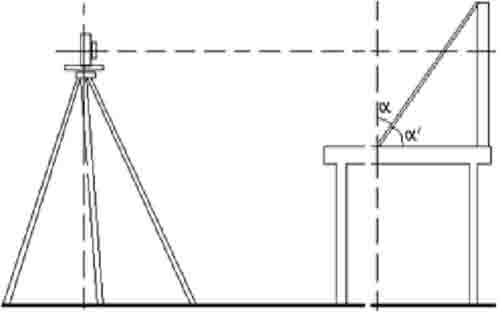
Рис. 8. Угол наклона тест-объекта
В результате выполненных работ были составлены следующие рекомендации, в дополнение к существующим, по выполнению калибровки цифровых фотоаппаратов с применением программного комплекса GML Camera Calibration Toolbox v 0.4:
- клетки текстуры должны быть четкими и яркими;
- шахматный рисунок должен быть нанесен с максимальной точностью, так чтобы клетки имели одинаковый, заранее определенный размер, а любые отклонения от эталонного размера были столь незначительными, чтобы это не влияло на качество работы программы, т.к. программный комплекс не предусматривает ввод фактической величины клетки тест-объекта, или ввода поправок за отклонение размера клеток от номинальной величины, и объект по умолчанию рассматривается как идеальный;
- съемка должна производиться в хорошо освещенном помещении, желательно дневным светом. Лучшие результаты также даетфотографирование совспышкой;
- перед выполнением съемки аппарат необходимо перевести в ручной режим съемки и, по возможности, отключить дополнительные автоматические настройки (например «интеллектуальное увеличение снимков»), которые, вероятно, вносят коррективы в полученное изображение, особенно, если эти исправления производятся за счет каких-либо пиксельных пересчетов;
- необходимо отключить автофокусировку в исследуемом аппарате и, если это возможно, установить фокусирование «на бесконечность» (или установить то фокусное расстояние, которое впоследствии будет применяться для работы);
- для более точной установки аппарата желательно использовать штатив с уровнями дляфото-ивидеокамер;
- желательно установить тест-объект на ровной горизонтальной поверхности с возможностью надежной фиксации угла наклона или разворота;
- необходимо менять экспозиции объекта, сохраняя постоянным значение угла наклона плоскости объекта к плоскости снимка. При одной экспозиции необходимо, чтобы из трех возможных углов наклона и разворота плоскости объекта относительно плоскости снимка, в идеале только один из углов наклона отличался от нуля (при этом плоскость объекта не может быть развернута относительно рамок снимка). Если у объекта угол наклона и разворота приблизительно одинаковые или оба угла наклона имеют сопоставимые значения, отличные от нуля, калибровка при таких условиях не даст истинных результатов.
С использованием данного программного комплекса в ходе исследовательских работ калибровались две бытовые камеры Canon PowerShot A 410 и Sony Caber-Shot W 210, имеющие стандартную оптику среднего класса, с характеристиками объективов, присущими большинству современных неметрических съёмочных систем. Аппараты позволяют выполнять съемку при полных ручных установках, отключая автоматическую фокусировку. Обе камеры имеют встроенный стабилизатор. Различные варианты проведенных съемок с использованием указанных фотоаппаратов позволили получить стабильные в пределах нескольких пикселей значения элементов внутреннего ориентирования. Значения коэффициентов дисторсии варьируются от съёмки к съёмке в пределах десятитысячных пикселя, что связанно с меньшей, субпиксельной, разрядностью самих величин.
По итогам проведенных опытов можно заявить о возможности калибровки неметрического фотоаппарата с использованием программного комплекса GML Camera calibration Toolbox v 0.4. Для того чтобы сделать выводы о качестве полученных результатов, необходимо было произвести их оценку точности. Для этого был выполнен ряд съемок в одинаковых условиях. Исследовались те же фотоаппараты: Canon PowerShot A 410 с разрешением матрицы 3,2 мгпкс и Sony Caber-Shot W 210, с разрешением матрицы - 12,1 мгкс, -при двух фиксированных установках предельного фокусного расстояния объектива каждый. Для аппарата фирмы Canon и аппарата фирмы Sony было выполнено по 10 съемочных серий для каждой из двух фиксированных установок предельных фокусных расстояний. Съемка производилась при стабильном угле наклона объекта в одинаковых условиях при 8 позициях объекта в одной серии.
Список литературы
- Сагайдак Д.И. Исследование и калибровка цифровых камер / Портал магистров ДонНТУ
- Гельман Р.Н., Дунц А.Л. Лабораторная калибровка цифровых камер с большой дисторсией // Геодезия и картография. М., 2002. №7, с.23-31.
- Курков В.М. Методы учета систематических искажения аэроснимка. Самокалибровка. // Известия вузов. Геодезия и аэрофотосъемка. М., 1980. -№6. с.75-79
- Михайлов А. П., Чибуничев А.Г., Курков В.М. Применение цифровых неметрических камер и лазерных сканеров для решения задач фотограмметрии
- Руководство по применению фотограмметрических методов для составления обмерных чертежей инженерных сооружений / Производственный и научно-исследовательский институт по инженерным изысканиям в строительстве ПНИИИС Госстроя СССР. М., 1984.
- Richard Ladstadter, Michael Gruber Geometric aspects concerning the photogrammetric workflow of the digital aerial camera ULRTACAMx.
- V.Vezhnevets, A.Velizhev GML C++Camera Calibration Toolbox(http://research.graphicon.ru/calibration/gmlc++-camera-calibration-toolbox.html).