Оптимизация переходных процессов движения механизмов перемещения крана
Автор:А.И. Панкратов, А.Ф. Залятов
Источник: Научные работы ДонНТУ (выпуск 16(142)).
Аннотация
А.И. Панкратов, А.Ф. Залятов. Оптимизация переходных процессов движения механизмов перемещения крана. Исследована методика определения оптимального управления для перемещения тележки крана. Показано влияние изменения частоты колебаний на переходный процесс.
При эксплуатации грузоподъемных механизмов возникают колебания груза, которые снижает производительность, увеличиваютриск возникновения аварийных ситуаций и ухудшают позиционирование [1]. Поэтому решение проблемы демпфирования колебаний позволит эффективнее использовать грузоподъемные оборудования.
Решение данной проблемы можно разделить на три группы:
- уменьшение раскачивания груза достигается за счет дополнительных движений механизма, осуществляемых оператором с помо-
щью ручного управления.
- применение замкнутых систем управления, которые требуют измерения величины угла отклонения. К недостаткам данных систем можно отнести сложность реализации и большие затраты при внедрении.
- реализация разомкнутой системы управления. Данный способ основывается на вычислении закона управления в момент пуска или торможения и не требует измерения величиныугла отклонения груза.
К недостаткам первой группы можно отнести быструю утомляемость оператора при увеличении рабочих скоростей. Недостаток замкнутых систем является сложность реализации и большие затраты при внедрении.
Последние исследования [2], посвященные решению данной проблемы, основываются на использовании принципа максимума Понтрягина, где управляющей величиной является момент на валу тележки, изменяющийся по релейной характеристике. Однако в данной работе допускалось не значительное изменение длина каната при совместной работе двух механизмов.
Сравним способы управления другими известными [1,2]. Общими требованиями всех рассматриваемых способов является полное гашение колебаний в конце переходного процесса.
На рисунке 1(4) рассмотрен закон управления №4, когда гашение колебаний обеспечивается в два этапа, исследование которого было выполнено в работе [3].
Анализируя графики рис.1 можно сделать вывод, что во втором варианте амплитуда колебаний наименьшая по сравнению с предложенными законами управления, однако полное успокоение раскачивания груза обеспечивается через время равное периоду колебаний (в 2 раза больше, чем в первом случае).
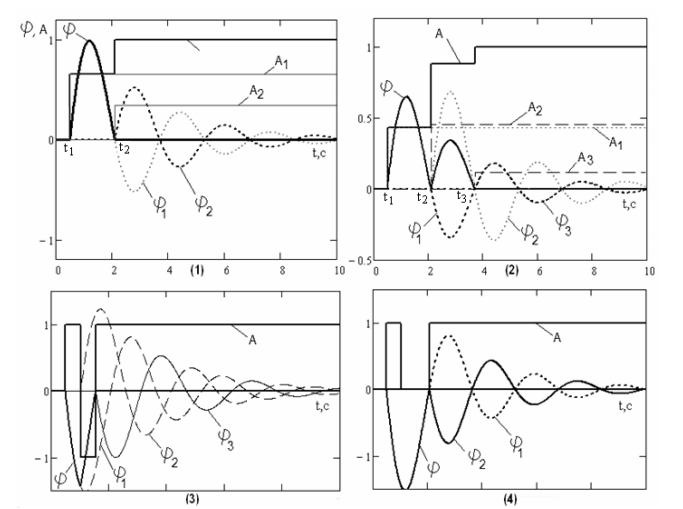
Рисунок 1- Графики переходных процессов А(t), φ(t)
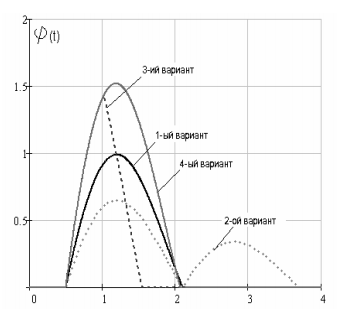
Рисунок 2 – Сравнение углараскачивания φi(t)
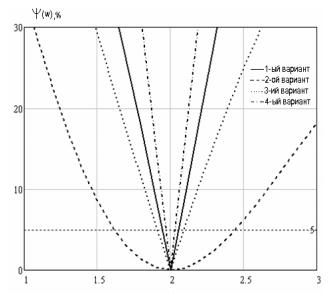
Рисунок 3 - Зависимость величины колебаний от изменения частоты
Сравним 4 метода демпфирования колебаний, изображенных на рис.(2). Из графиков видно, что первые два закона имеют меньшую амплитуду колебаний и большее время переходного процесса.
Для рассматриваемого класса ПТМ свойственно совмещение операций механизма передвижения груза по горизонтальной плоскости с одновременным его подъемом или спуском.
При изменении длины каната, изменяется частота колебаний груза, поэтому с помощью фазовой плоскости определим зависимость величины угла раскачивания в конце переходного процесса (в % от максимального) от изменения частоты.
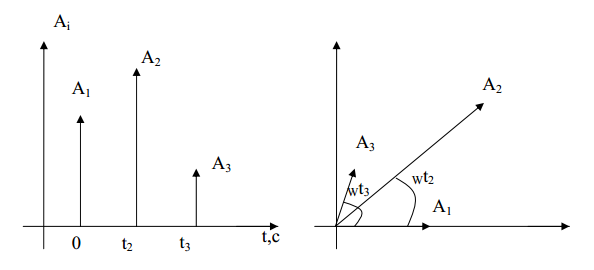
Рисунок 4 – Последовательность импульсов Аi
Из графиков видно, что при изменении частоты колебаний в конце переходного процесса остаются остаточные колебания. При использовании второго варианта остаточные колебания при изменении частотына 25% не превысят уровня 5%.
Анализируя графики рис. 3 можно сделать вывод, что при использовании второго закона управления (рис.1(2)) изменение частоты колебаний оказывает гораздо меньшее влияние на переходный процесс, чем рассмотренные методы.
Таким образом, построенные зависимости (рисунок 3) позволяют выбрать закон управления, при котором допускается совмещение операций передвижения груза с одновременным его подъемом или спуском и при этом угол колебаний в конце переходного процесса не превышает допустимого уровня.
Анализ полученных результатов свидетельствует о широких возможностях применения разработанного метода для выбора способа управления электромеханических систем грузоподъемных механизмов.
Список использованной литературы
1. Смехов А. А., Ерофеев Н. И. Оптимальное управление подъемно-транспортными машинами. – М.: Машиностроение, 1975. – 239 с. 2. Герасимяк Р. П., Мельникова Л. В. Оптимальное управление крановым механизмом передвижения // Автоматика. Автоматизация. Электротехнические комплексы и системы. – 1999. - №1. – С. 87-94. 3. Панкратов А.И., Залятов А.Ф. Оптимальное управление электроприводом механизма передвижения крана с учетом изменения длины каната // Проблемы автоматизированного электропривода. Теория и практика. – 2008.