Разработка нейросетевой модели для управления рисками проекта
Автор:Захарова Л.Н.
(ОАО "Покровское"),
Назимко В.В.,
д.т.н., проф., ДонНТУ
Автор:Захарова Л.Н.
(ОАО "Покровское"),
Назимко В.В.,
д.т.н., проф., ДонНТУ
Разработана модель работы очистного забоя на основе нейронной искусственной сети, которая используется для управления проектом отработки выемочного столба
Современное состояние мировой и отечественной экономики характеризуется перманентной нестабильностью, которая не только повышает риски любого проекта, но и создает такие условия, при которых управление риском является важнейшей и неотъемлемой компонентой самого проекта [1-3]. Большие проекты, требующие крупных инвестиций, осуществляются в большинстве случаев в условиях высокой неопределенности, причем существует множество факторов, которые влияют на устойчивость проекта, а предсказание реакции проекта на изменение факторов наталкивается на серьезную проблему нелинейности, которую уже не могут учесть традиционные математические модели.
Характерным примером является отработка угольных месторождений, которая в условиях Украины осуществляется в весьма сложных горно-геологических условиях. Указанные условия характеризуются нестабильной мощностью отрабатываемых угольных пластов, неспокойным их залеганием, наличием зон малоамплитудных нарушений, которые практически не поддаются детальной разведке, склонностью угольных пластов и вмещающих пород к газодинамическим явлениям, уровень прогноза которых далек от совершенства, сильным разбросом значений физико- механических свойств вмещающих пород и т.д. Это значит, что почти все проекты отработки запасов угля подвержены не только рискам, которые испытывают традиционные технологии, реализуемые на земной поверхности, но и дополнительным рискам геологической природы и специфики подземного производства, что в целом в несколько раз повышает уровень рисков. Высокая неопределенность факторов подземной добычи угля выдвигает новые требования к моделям, используемым при управлении проектами отработки угольных запасов. Одно из главных требований к таким моделям является условие устойчивой работы модели за пределами диапазонов, при которых реакция проекта на изменение значений влияющих факторов известна. Другими словами в подземных условиях больше вероятность возникновения такого сочетания значений факторов, при котором поведение модели заранее неизвестно.
Представление о неопределенности горно-геологических условий отработки выемочного столба в пределах угольного пласта одной из высокопроизводительных украинских шахт дает сравнение геологического строения угольного пласта и вмещающих пород, которые показаны на рисунке 1. На фрагменте (а) приведен прогнозный разрез толщи, а на фрагменте (б) фактический, который был зафиксирован после проведения подготовительной выработки в процессе подготовки столба к выемке. Видно, что мощность пласта изменяется в несколько раз по сравнению с прогнозным разрезом, причем по длине столба существуют зоны малоамплитудных нарушений, которые являются источниками опасных газодинамических явлений.
На сегодня подобные модели строятся на основе искусственных нейронных сетей [4-6], которые имеют существенное преимущество перед традиционными математическими моделями, основанными на теории вероятности и математической статистики. Нейронные сети способны к обобщению и могут обеспечивать устойчивый прогноз за пределами области данных, на которых тренировали данную сеть.
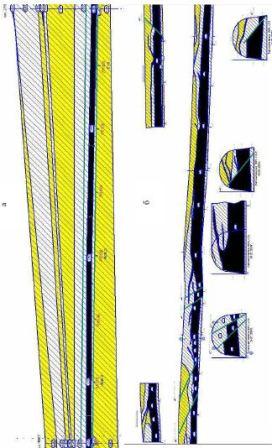
Проектный разрез и фактическое строение толщи
Существуют десятки типов нейронов. Пример искусственного нейрона в виде перцептрона показан на рис. 2. Нейрон получает на вход сигналы, которые в нашем случае представляют собой значения факторов, влияющих на процесс отработки выемочного столба. Входные сигналы поступают по синапсам и масштабируются с помощью весовых коэффициентов. Затем сигнал суммируется и преобразуется с помощью пороговой функции, которая выдает выходной сигнал, используемый для управления процессом, в данном случае ходом проекта.
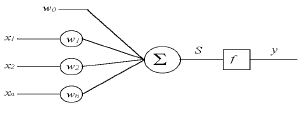
Рис. 2. Модель нейрона
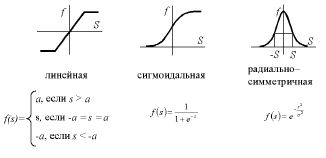
Рис. 3. Типы активационных функций нейронов
Пороговая функция выполняет очень важную роль, моделируя нелинейность системы в целом. Используется целый ряд пороговых функций в зависимости от природы управляемого процесса (рис. 3). Рис. 2. Модель нейрона Рис. 3. Типы активационных функций нейронов Общее свойство всех указанных функций является их нелинейность, обеспечивающая гибкость реакции системы на входные сигналы.
Нейроны объединяются в сеть и взаимодействуют между собою. Пример искусственной нейронной сети, которая является базой математической модели очистного забоя приведен на рис. 4.
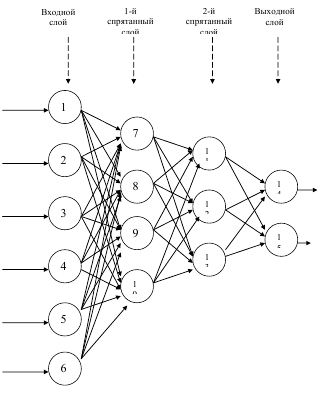
Рис. 4. Структура нейронной сети
В данном случае сеть состоит из шести входных нейронов во входном слое, семи нейронов в двух скрытых или промежуточных слоях и два нейрона в выходном слое. Все нейроны последовательно связаны в направлении прохождения сигнала, хотя это необязательно. Некоторые связи между смежными нейронами могут отсутствовать, могут быть обратные связи и т.д.
На вход сети подают текущие значения факторов в нейроны 1 - 6, которые в данном представлены расходом воздуха, подаваемого для проветривания очистного забоя, прочности пород кровли и почвы, уровню горного давления впереди лавы, а также факторами изношенности забойного конвейера, очистного комбайна и механизированных крепей. После преобразования входных сигналов на выходе сети получаем значения двух параметров: текущую скорость подвигания очистного забоя и вероятность его остановки или аварии. Преобразование входных сигналов осуществляется согласно зависимостям:

Для того, чтобы научить сеть адекватно реагировать на входные параметры, ее тренируют на основе фактического опыта. Фактический опыт собирают по данным работы аналогичного очистного забоя, работающего в аналогичных условиях в течение представительного отчетного периода, например квартала или года. Кроме этого, часть данных получают на основе ранее установленных зависимостей или выполненных предварительных исследований.
Существует несколько методов тренировки искусственной нейронной сети. На сегодня получил наибольшую популярность генетический алгоритм, который имитирует дарвиновский процесс естественного отбора, протекающий в условиях конкуренции. [7]. Генетические операторы используют те же операции, которые существуют в природе. Основными генетическими операторами являются кроссовер, или скрещивание, мутация и инверсия (рис. 5).
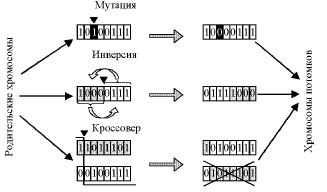
Рис. 5. Генетические операторы
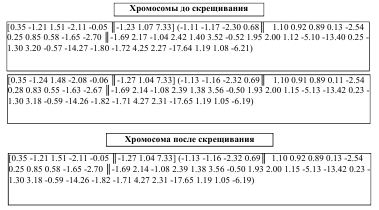
Рис. 6. Структура хромосом до и после скрещивания
При кроссовере два родителя порождают двух потомков, несущих частично наследственную информацию от обоих родителей. Важно при этом, что место скрещивания хромосом родителей выбирается случайным образом, что обеспечивает случайный поиск лучших индивидуумов по всему множеству возможных сочетаний одновременно. Благодаря параллелизму, который заложен в идею генетического оператора, поиск лучших индивидуумов происходит с очень высокой скоростью. Оператор мутации не позволяет процессу поиска застревать на локальных максимумах или минимумах.
Гены могут быть представлены либо двоичным кодом как показано на рис. 5 или вещественными числами, что иллюстрируется схемой на рис. 6. В зависимости от природы моделируемого объекта в качестве генов могут выступать любые признаки, которые выполняют важную роль в процессе. В данном случае в качестве генов используются весовые коэффициенты и смещения, которые изображены на рис. 1 и приводятся в формулах (1 и 2). Процесс мутации моделируется следующими простыми зависимостями
Для тренировки нейронной сети используют наборы входных и выходных данных, число которых должно быть больше на порядок числа нейронов в тренируемой сети. В данном случае сеть состоит из 15 нейронов, поэтому необходимо иметь для тренировки порядка 100-200 наборов данных. Такое число фактических данных достаточно просто получить по итогам анализа работы очистного забоя в течение квартала. На рис. 7 показан процесс тренировки сети, в результате чего происходит неуклонный рост среднего уровня фитнеса и величины фитнеса наилучшей нейронной сети. В качестве фитнеса используется в данном случае величина, обратная суммарной ошибке сети по всем выходным наборам данных. Чем меньше суммарная ошибка, тем выше фитнес, тем больше вероятность имеет лучшая сеть оставить после себя потомство и таким образом передать свои способности к прогнозированию.
Аналогичная модель создается и тренируется для системы вентиляции и транспорта. Кроме того, весьма целесообразно добавить экономическую модель объекта, в данном случае выемочного участка. Некоторые входные факторы одних моделей представляют собой выходные сигналы других моделей. На рис. 8 показана схема взаимодействия и взаимосвязи отдельных моделей проекта.
В итоге математическая модель проекта собирается из отдельных моделей (очистных работ, транспорта, вентиляции и экономики), которые взаимодействуют между собой. Так выходной фактор «скорость подвигания очистного забоя» модели «очистные работы» является входным фактором в модели «экономика», а выходные факторы моделей «транспорт» и «вентиляция» являются входными факторами «количество воздуха» и «надежность конвейерной цепочки» для модели «очистные работы». Существует также обратная связь между моделью «экономика» и остальными моделями проекта, поскольку устойчивое финансирование всех компонент проекта является жизненно важным для его устойчивости в целом.
Применение указанной модели дает возможность оперативно управлять проектом на основе текущей информации, которая используется в качестве входных сигналов в составляющие проект модели. Такое управление в режиме реального времени дает возможность заблаговременно прогнозировать и устранять негативные эффекты, которые могут снизить скорость подвигания очистного забоя, а значит увеличить риск невыполнения проекта в срок.
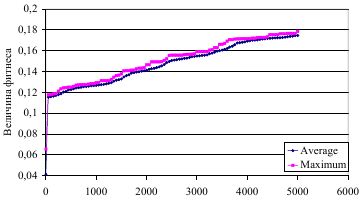
Рис. 7. Процесс тренировки нейронной сети
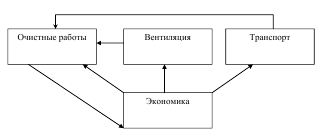
Рис. 8. Общая структура проекта отработки выемочного столба