В наше время асинхронные двигатели (АД) нашли широкое применение в различных отраслях промышленности, быту и сельском хозяйстве. Их используют в электроприводах различных механизмов: металлорежущих станков, лифтов, конвейеров, насосов, вентиляторов. Маломощные двигатели используются в устройствах автоматики и бытовой техники.
Широкое применение АД объясняется их достоинствами по сравнению с другими двигателями: высокая надёжность, простота ремонта, малое количество конструктивных элементов, возможность работы непосредственно от сети переменного тока, простота обслуживания.
Однако простота конструкции приводит к сложности при пуске двигателя. В момент пуска в ход скорости n=0, скольжение S=1. Так как токи в обмотках ротора и статора зависят от скольжения и возрастают при его увеличении, пусковой ток двигателя в 5 – 10 раз больше его номинального тока Iпуск=(5–10)Iн. Такие большие токи в статоре являются нежелательными по условиям динамических усилий в обмотках и нагрева обмоток. При частых пусках, а также при весьма тяжелых условиях пуска, когда маховые массы приводимых в движение механизмов велики, возникает риск перегрева двигателя.
При прямом пуске возникают такие негативные явления [1]:
1) Влияние на сам двигатель. Пиковые броски тока в переходном процессе пуска (5-10-кратные по отношению к номинальному) приводят к значительным усилиям на проводники, расположенные в лобовых частях обмотки электродвигателя. Как следствие, имеет место ослабление бандажирования обмотки, постепенное нарушение (перетиранию) изоляции и преждевременный выход двигателя из строя по причине короткого замыкания витков обмотки. Также проявляется и тепловое разрушение изоляции в результате превышения допустимого уровня температуры.
2) Влияние на питающую сеть. При питании от автономных генераторов или сетей малой мощности, а также при питании посредством протяженной линии падение напряжения на их внутреннем сопротивлении приводит к просадке напряжения на зажимах АД, особенно при протекании пусковых токов. Это также отрицательно сказывается на работе другого подключенного к сети оборудования (контроллеры, компьютеры, связь, терминалы релейной защиты и др.), а сам двигатель может не запуститься из-за малой величины развиваемого момента.
3) Влияние на технологический процесс. Значительные пиковые моменты переменного знака при пуске АД, превышающие номинальное значение момента до 4-5 раз, приводят к постепенному увеличению зазоров в механических соединениях между двигателем и механизмом, кроме того, в ряде случаев вредно сказываются на технологическом процессе, где такие механические нагрузки недопустимы. К числу таких механизмов относятся, например, магистральные конвейеры, когда может иметь место вытягивание приводного ремня, вентиляторы и смесители в случае опасности деформирования лопастей, поломка рабочих колес насосов, системы транспортировки развешанных, уложенных или хрупких материалов при возможности их раскачивания, падения или рассыпания и т.д.
Все способы пуска можно разделить для АД с короткозамкнутым ротором и АД с фазным ротором. Первые проще конструктивно и в обслуживании, а также дешевле и надежнее в работе, чем двигатели с фазным ротором, который имеет более сложную конструкцию.
В связи с этим, на наш взгляд, целесообразным является исследование пуска асинхронных двигателей с короткозамкнутым ротором. При этом исследования должны предполагать как теоретическую, так и практическую часть.
Как известно, различат следующие способы пуска АД с короткозамкнутым ротором:
- Прямой пуск (включение на полное напряжение питающей сети);
- Снижение напряжения питающей сети (требует наличия специальной сети);
- Ступенчатый пуск переключением пар полюсов (многоскоростной АД специального назначения);
- Переключением обмотки статора со звезды на треугольник (необходим доступ к началам и концам обмоток статора);
- Реакторный пуск (введение реакторов в цепь статора);
- Реостатный пуск (введение резисторов в цепь статора);
- Автотрансформаторный пуск;
- Частотный пуск (изменение частоты напряжения питающей сети);
- Пуск с применением муфт;
- Пуск с применением инерционой крыльчатки.
Для исследования, анализа и выбора метода пуска АД на кафедре «Электропривод и автоматизация промышленных установок» (ЭАПУ) в лаборатории систем управления электроприводами спроектирован стенд для исследования схем пуска АД. Стенд включает в себя:
1) Релейно-контакторная система управления двухскоростным двигателем. В основу стенда положено коммутационное оборудование фирмы Мoeller, используемое в электроприводах лифтов многоэтажных зданий. На рис.1 представлена принципиальная схема управления двухскоростным АД, в качестве которого принят двигатель АИР80В4/2У3 мощностью 1,5 кВт/2,2 кВт (380 В, 50 Гц, 1410/2760 об/мин, 3,8А/4,6А).
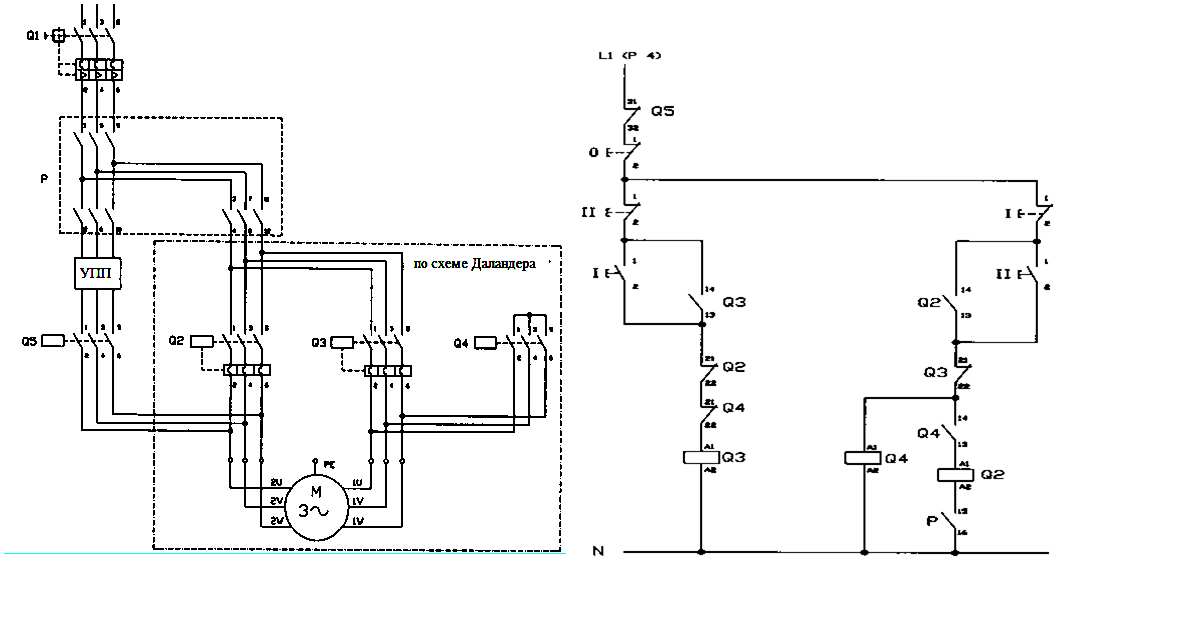
Рисунок 1 – Силовая и управляющая часть
2) Система плавного пуска АД на основе устройства Altistart_48_ATS48D17Q (17А, 170-460В), управляющего пуском двигателя АИР100S2 номинальной мощностью 4,5 кВт (~380 В, 50 Гц, 1440 об/мин, 14 А). Схема подключения устройства плавного пуска (УПП) приведена на рис.2. Нагрузка на валу исследуемой машины создается нагрузочным асинхронным двигателем АИР80S2 номинальной мощностью 2,2 кВт (~380 В, 50 Гц, 2780 об/мин, 4,8 А), питаемым от преобразователя частоты ACS550-01-012А-4 (12А, 380-480 В), что позволяет также выполнять исследование различных способов частотного пуска АД.
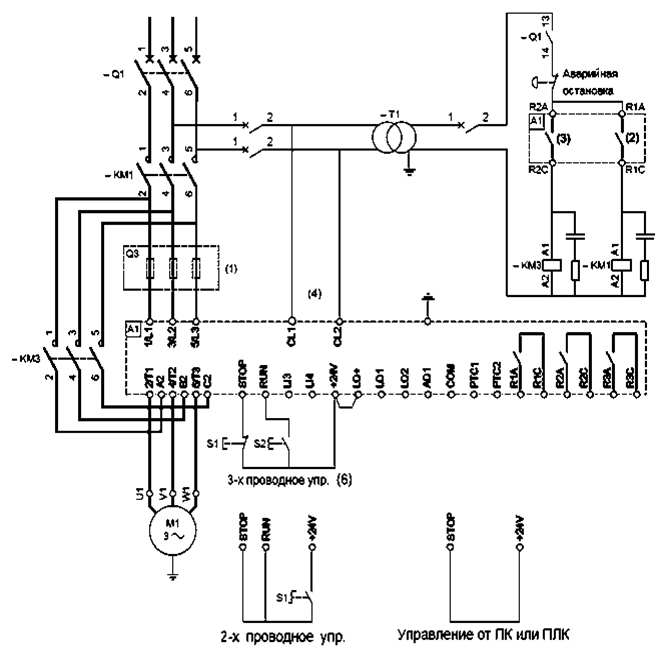
Рисунок 2 – Система плавного пуска на основе УПП Altistart_48_ATS48D17Q.
Применение УПП позволяет уменьшить ударные перегрузки путем снижения пусковых токов, снизить вероятность перегрева двигателя, повысить срок службы двигателя, устранить рывки в механической части привода в момент пуска и останова двигателей, исключить механические или гидравлические удары, поддерживать постоянное ускорение до достижения номинальной скорости даже при наличии значительного статического момента, увеличить срок службы конвейерных лент и механизмов, обеспечить предварительный прогрев двигателя во избежание появления конденсата, исключить работу при обрыве фазы питающей сети, обеспечить каскадный пуск и останов нескольких двигателей.
Кроме того, УПП позволяют снизить активную потребляемую мощность, существенно снизить реактивную мощность, защитить двигатель, снизить шум, нагрев и вибрацию электродвигателя. Вместе с тем, УПП, как правило, не предполагают регулирования скорости АД. Поэтому преимуществами УПП по сравнению с преобразователями частоты можно также считать: 1) значительно меньшая стоимость; 2) меньшие потери от прямого падения напряжения на силовых элементах; 3) простота схемы подключения; 4) более высокая надежность вследствие более простой силовой схемы; 5) наличие гармонических составляющих тока только во время пуска.
Разработанный стенд планируется к использованию в учебном процессе по подготовке бакалавров по направлению «Электромеханика» кафедрой ЭАПУ и в перспективе может быть расширен и дополнен. В качестве ближайшей перспективы рассматриваем реализацию системы логического управления АД на основе программируемого логического контроллера OVEN 100-24, а также разработку средств компьютерной регистрации напряжений, токов и скорости исследуемых АД.
Перечень ссылок
1. Кацман М.М. Электрические машины – Москва: Высшая школа, 2000.- 526 с.