
Alabiat Hamza
Electrotechnical faculty
Department «Electrical drive and automation of industrial installations»
Speciality «Electromechanical system of automation and electrical drive»
development and probe energy saving laws of frequency steering of the asynchronous engine
Чекавский Глеб Станиславович
contents
- introduction
- 1. Work purpose
- 2. relevance of a subject
- 3. As a result it is possible to use more effectively the energy brought to the engine
- 4. Assessment of efficiency of drop of losses of energy when using the converter of frequency
- 5. Results of the analysis of schedules of processes are reduced in tab. 1
- Conclusion.
- List of references
introduction
Systems of the frequency and adjustable electric drive (EP) on the basis of the three-phase asynchronous engines (AE) with scalar steering have a wide circulation in drive gears of gears
demanding speed regulation in the small range (to 10:1) in combination with moderate requirements to quality of transients (for example
majority of common industrial transport gears).
Control of systems of scalar frequency steering, in comparison with systems of vector steering with orientation across the field, is rather simple, and is generally reduced to a choice of the law of frequency steering.
In practice cases when driving the HELL of common industrial transport gears work with partial loading [1] when the moment on a shaft the HELL doesn't exceed 50% of nominal rate are frequent. It is known that power indicators the HELL [efficiency, power factor] are thus significantly lower than nominal (passport) rates.
At speed regulation the HELL by means of algorithms of scalar frequency steering is available possibility of additional increase of power indicators due to correction of the law of frequency steering. One of the most effective ways of such correction is the organization of an additional, parallel circuit of regulation of [2] coordinates which value is supposed to be stabilized.
This additional port of regulation has to provide drop of amplitude of the feeding tension that at partial loading the HELL, as shown in [1], leads to increase of parameters.
1.Work purpose
synthesis and the analysis of various modes of performance of a parallel circuit of the regulation (stabilization) intended for increase of power indicators of systems of scalar frequency steering the HELL and their maintenance at level, approximately corresponding to the natural characteristic the HELL is. Full capacity consumed by the engine is defined by expression:
2. relevance of a subject is defined by expression:
Full capacity consumed by the engine is defined by expression:
where, – operating (effective) values of tension and current of a phase of a stator the HELL. If the current phase shift of ? between the phase tension and current (a loading corner), that is known, knowing a cosine of this corner (power factor) it is possible to determine consumed active and jet capacities: Total loss of power in the engine are formed from electric losses in copper of a stator (?Рм1) and a rotor (?Рм2), losses in steel of a stator (?Pc1), mechanical (?Рмех) and additional (?Рдоб) of losses. Useful power on a shaft the HELL (output power) is equal: and efficiency of electromechanical transformation of energy is characterized к.п.д. It is expedient to carry out quantitative definition of mechanical losses in a binding to the kinematic scheme of mechanical system set in motion that is beyond the present article. Additional losses often are accepted otsenochno (to 1% of total losses). Therefore in this article we will be limited to consideration of only electric losses in (2). It is known that at loading change on a shaft the HELL power indicators of work of EP (? and ?) also change. This change takes place owing to dependence of a corner of loading of ? on frequency that causes corresponding change of internal resistance the HELL. Dependence of power indicators of EP as a static moment of loading of MS and frequency of the feeding tension at frequency steering the HELL according to the proportional law () is illustrated in fig. 1 for the engine 4A-180-M4 (30 kW).
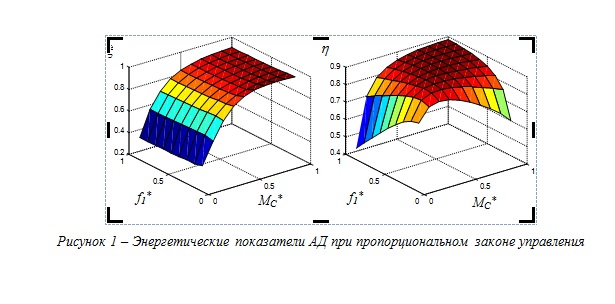
From dependences of fig. 1 it is visible that at partial loading of the driving engine there is a resource for increase in power indicators of the engine. For example, in work [Kitman M. "Probe of power characteristics of asynchronous electric drives at various modes of steering" Qualification work on receiving to the EYE "master" in the specialty 8.05070203 "Electromechanical systems of automation and the electric drive"] the problem of increase of power indicators of a drive gear of the passenger escalator is reached due to application of search algorithm. As it was shown above, loading of the driving engine of the escalator in big degree depends on number of the passengers staying on a cloth in the current time. Above also it was shown that power indicators of a drive gear thus also decrease. For providing a mode of optimum power consumption of a drive gear of the escalator it is expedient to reduce tension at partial loading of the escalator. Thus the basic ratio tension/frequency is exposed to change – amplitude of tension will be slightly less than reloading ability necessary from the point of view of preservation, as a result engine speed will decrease a little, but power indicators of a drive gear thus will be optimum (maximum).
3 a result it is possible to use more effectively the energy brought to the engine
- increases of efficiency of a drive gear – consumption of active power is reduced, the economy of the electric power as a result takes place;
- increases of power factor of a drive gear – consumption of jet power is reduced, and also indirectly we gain additional effect from drop of losses of active power in wires, bringing food to installation, and in the power cables connecting the converter of frequency to the driving engine.
Generally it is realized for the account:
For confirmation of this thesis it is necessary to execute test calculations that will be made lower.
4 Assessment of efficiency of drop of losses of energy when using the converter of frequency
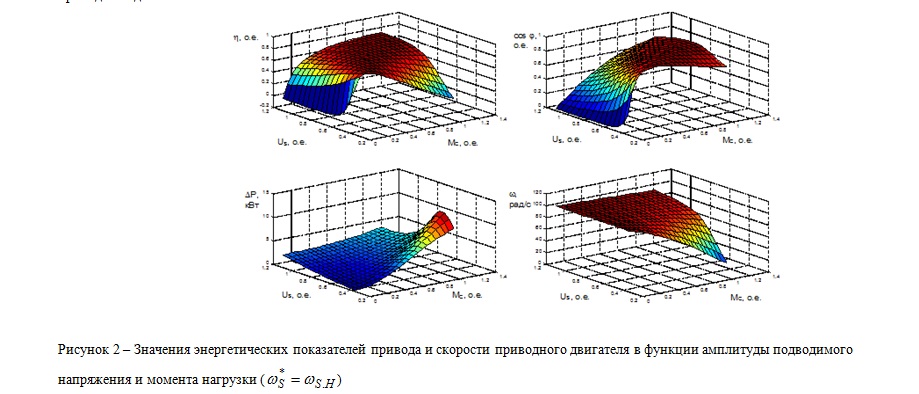
For an assessment of efficiency of drop I rubbed a drive gear of the escalator the test calculations which results are given in fig. 2 were executed. By means of the given dependences it is possible to estimate possible effect from application of energy saving steering. At nominal loading of a drive gear power indicators of a drive gear the best – к.п.д. and power factor of a drive gear are maximum. At drop of the moment of loading of Ms (at fixed Us=1) drop as к.п.д is observed. and power factor, i.e. бо ’the drive gear spends lshy part of active and jet power inefficiently. We will pay attention that at partial loading of a drive gear of loss of power decrease, but this drop isn't proportional to drop of the consumed active power. Besides, speed increase which is defined by ruggedness of rating mechanical data of the engine takes place. From dependences of fig. 2 areas of optimum power indicators of a drive gear are also visible. At concrete loading of a drive gear (<1) drop of amplitude of tension brought to the engine leads Mc=const to redistribution of streams of energy in the engine, and to increase as к.п.д. and drive gear power factor. Loss of power thus also decreases. We will pay attention that decreases as well ruggedness of mechanical characteristics, is it is necessary to take into account at specific modes of behavior of the gear. Dependences illustrate also that at the loadings of the engine close to nominal (full), possible effect from energy saving practically is absent, i.e. the problem of increase of energy efficiency of work of a drive gear is actual at incomplete loading of the driving engine.
5 Results of the analysis of schedules of processes are reduced in tab. 1.
Thus, algorithm introduction for a considered drive gear will allow:
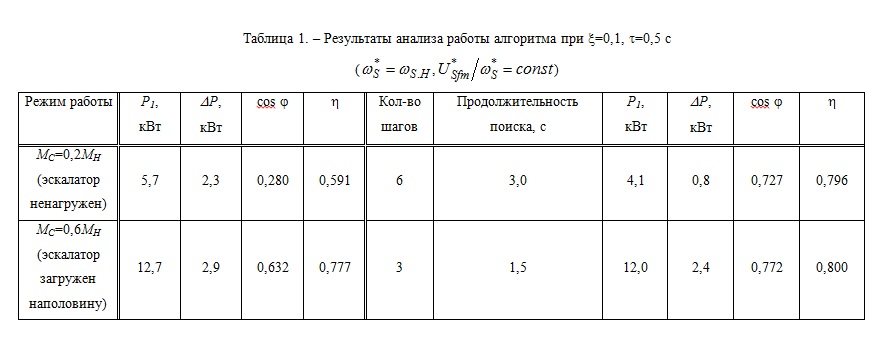
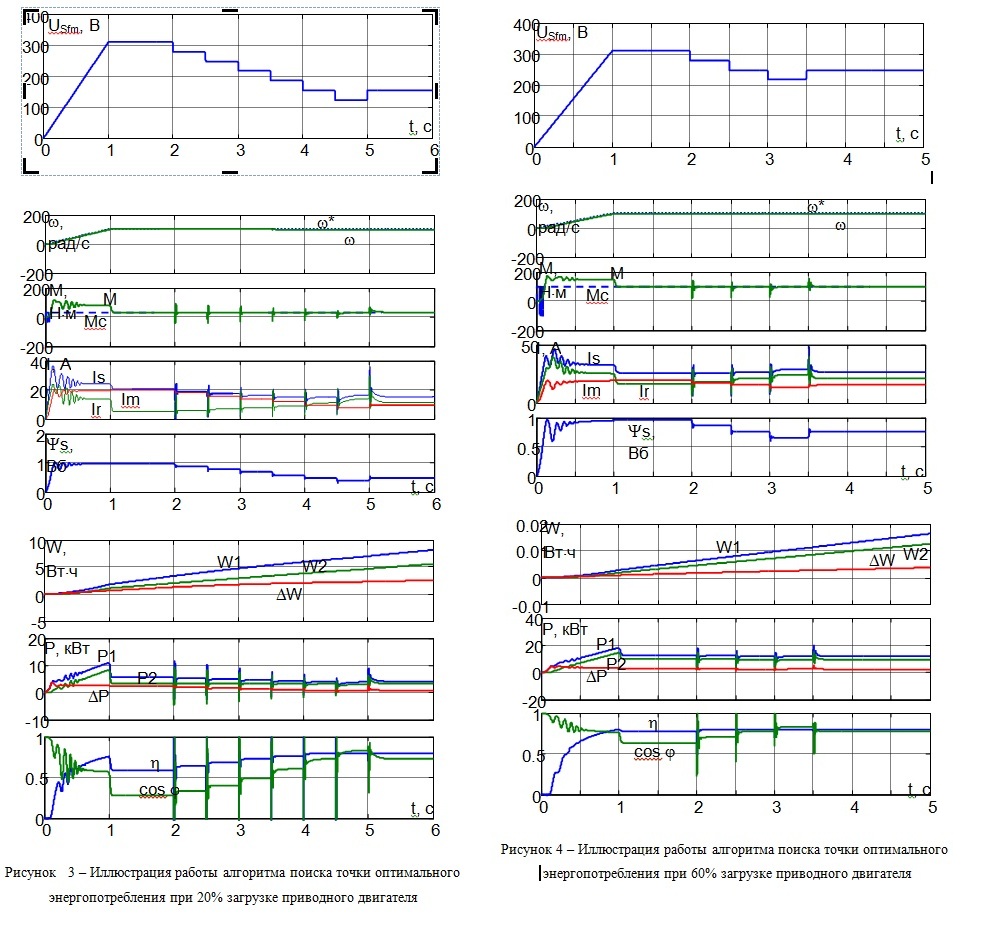
In fig.3.4, schedules of coordinates of the electric drive, illustrating work of algorithm of search of a point of optimum power consumption are submitted. Initially the mode of behavior of the electric drive is defined by rated brought voltage to the engine, the basic law of steering –. For descriptive reasons works of algorithm are accepted values of the local ?=0,1 parameters (the step of drop of amplitude of tension makes 10%), ?=0,5 with (duration of one step). In the analysis 2 boundary cases are taken – the drive gear works in a mode of real idle running at MC=0,2MH (the escalator isn't loaded, passengers are absent) (fig. 5.3), the drive gear is loaded half at (MC=0,6MH) (fig. 5.4).
Idea – to apply feedback which will provide automatic maintenance of a nektory power indicator at the set level.
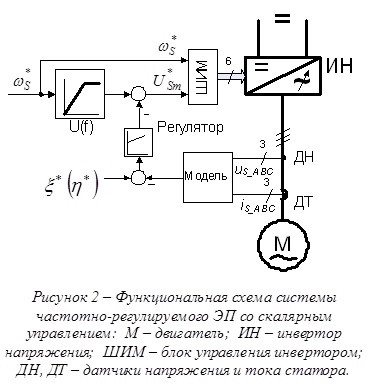
з the received dependences it is possible to estimate drop of power indicators at partial loading the HELL (at), and also to define desirable values of indicators as which it is expedient to accept the values close to the nominal. The generalized function chart of a control system of EP is presented in fig. 2. The system assumes parallel correction of the chosen power indicator (? or ?) – by impact on amplitude of tension enclosed to a stator the HELL. The model carries out calculation of necessary parameter on (1) or (3), the PI-type adjuster as a signal of a mismatch forms a signal of correction of amplitude of tension of a stator. Tuning of an adjuster of a parallel circuit is performed, proceeding from desirable dynamics of a circuit of regulation.
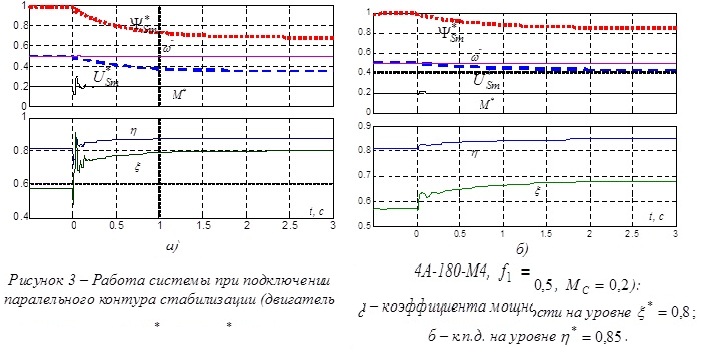
In fig. results of modeling of work of system are shown with a set frequency, a static moment of loading. In each of the considered cases the circuit of regulation is adjusted so that to provide achievement of desirable value of parameter in time, approximately making 2 pages. The presented results testify to possibility of achievement of a goal at the organization of an additional circuit of stabilization as power factor, and к.п.д. The first option thus is more preferable in view of more expressed monotonous dependence of ? on the frequency of f1 and the moment of loading of MC. It should be noted also that in other cases the additional circuit of regulation can be organized for maintenance at demanded level of any coordinate (for example, the consumed jet power, the module of flux linkage of a stator, etc.).
Conclusion.
It is shown that it is possible to reach improvement of power indicators of system of frequency and adjustable EP with scalar steering at the expense of the organization of an additional parallel circuit of stabilization к.п.д. or power factor at desirable level. It is obvious that it has advantages before application of search algorithm.
List of references
- Braslavsky I.Ya. Energy saving asynchronous electric drive [Studies. grant] / Braslavsky I.Ya. Ishmatov Z.Sh. Polyakov V. N. [Under the editorship of I.Ya. Braslavsky]. – M.: Academy, 2004. – 202 pages.
- Poles V. N. Dinamika of a circuit of optimization of modes of the asynchronous engine in a mode scalar Steering / Polyakov V. N., Borodin M. Yu. Ganzha N.N., Bortnikov M. E. // V_snik NTU "Hark_vsky Pol_tekhn_chniya _nstitut". Серія "Problemi of the avtomatizovany electric drive. Теорія і practice". – 2013 . – No. 36 (1009). – Page 230-231.