Аннотация
А.В. Торопов, Д.А. Абдураманов Особенности построения систем позиционирования в упаковочных автоматических установках на базе серийных преобразователей частоты LENZE
Описаны основные требования к функциональным возможностям преобразователей частоты, используемых в задачах позиционирования. Сформулированы особенности программирования и настройки электроприводов для систем позиционирования упаковочных автоматов и механизмов, работающих в старт-стопных режимах. Описаны функциональные возможности серийного преобразователя частоты lenze 8400 Vector Highline и представлены выводы о целесообразности его применения в задачах управления положением.
АКТУАЛЬНОСТЬ РАБОТЫ.
В последнее время возрастают требования к производительности автоматических упаковочных линий и установок. При этом в значительной степени производительность системы в целом определяется быстродействием двух электроприводов: так называемых «питателя», работающего в режиме позиционирования для подачи упаковочной пленки системы, и «запайщика», работающего в режиме переключения скоростей вращения [1]. Определение рациональной структуры и элементов систем электропривода, обеспечивающих высокую производительность без значительного увеличения стоимости оборудования в целом, является актуальной задачей.
МАТЕРИАЛ И РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ.
Особенностью украинского рынка упаковочных механизмов является значительное присутствие на нем западноевропейских поставщиков, предлагающих потребителю установки, выпускающие до 70 упаковок в минуту. В таких условиях нашему производителю, чтобы конкурировать с зарубежными поставщиками, необходимо предлагать аналогичные установки по значительно более низким ценам и в то же время не уступающие им по качеству. Одним из подходов к снижению стоимости упаковочных автоматов является реализация большинства функций, обычно выполняемых программируемым контроллером либо внешней микропроцессорной системой с помощью самого преобразователя частоты. При этом освобождаются вычислительные ресурсы контроллера для выполнения других функций, таких, как визуализация, обработка высокоскоростного датчика метки и т.д. Другим подходом к снижению стоимости упаковочных автоматов является замена дорогостоящих сервопреобразователей с синхронными двигателями, обеспечивающих точное позиционирование пленки и ее удержание, преобразователями частоты с асинхронными двигателями, оборудованными фотоимпульсными датчиками обратной связи.
Возможным решением реализации замкнутой системы управления позиционированием пленки является применение преобразователей частоты новой серии 8400 Vector Highline немецкой компании Lenze [2]. Отличительной особенностью такого электропривода является встроенная функция табличного позиционирования, т.е. возможность реализации профилей перемещения с заданными скоростью и ускорением. В преобразователе можно назначить до 13 фиксированных перемещений по положению, а также обеспечить управление преобразователем в режиме регулирования скорости, толчковом режиме, режиме поиска опорной «нулевой» точки. Внешний контроллер формирует лишь дискретные сигналы на включение соответствующих профилей перемещения и режимов работы, что существенно позволяет уменьшить его вычислительную загрузку. Общий вид окна настроек отрабатываемого профиля перемещения имеет вид, изображенный на рис. 1. Для конфигурирования преобразователей частоты серии 8400 Vector Highline использовалось программное обеспечение L-force Engineer Highlevel. Оно позволяет осуществлять настройку встроенного контроллера путем изменения не только значений параметров настройки, но и логических связей между функциональными блоками преобразователя частоты. В данном программном обеспечении задействованы конфигурации для типовых настроек преобразователей частоты, работающих в режиме регулирования положения. Основными из них являются: режим регулирования скорости, режим табличного позиционирования по заданному профилю и режим позиционирования с применением концевых выключателей. Отметим, что для электропривода питателя используется режим табличного позиционирования по заданному профилю, при котором обеспечивается автоматическое конфигурирование параметров профиля перемещения, а также логика срабатывания дискретных датчиков метки. Подключение преобразователя к персональному компьютеру осуществляется либо с помощью специального модуля диагностики E94AZCUS, либо с помощью последовательного интерфейса связи CAN
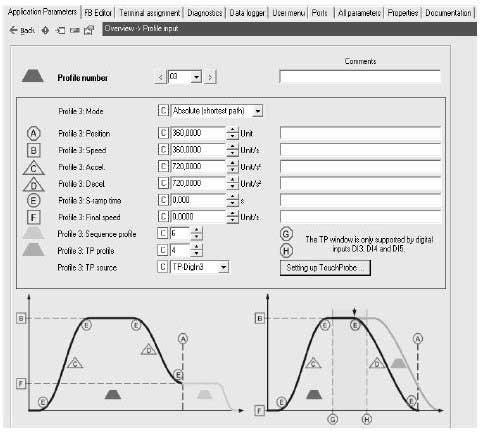
Рисунок 1 – Окно настройки параметров профиля перемещения при подаче управляющих дискретных входных сигналов
При настройке профиля пользователь имеет возможность задания типа перемещения – абсолютное или относительное, максимальной скорости движения, времени ускорения и замедления, а также скорости при окончании движения по профилю. Для реализации профиля перемещения с абсолютным позиционированием необходимо провести процедуру поиска опорной точки для привязки механизма к начальному положению. При этом возможны несколько алгоритмов поиска начального положения как по концевым выключателям, так и по достижению максимального значения тока электродвигателя (в случае упаковочных механизмов используется поиск по фронту дискретного датчика положения).
По окончании отработки заданного профиля перемещения преобразователь переходит в режим ожидания до поступления сигнала задания на выполнение следующего перемещения либо выполняет профиль, номер которого определяется значением параметра Sequence profile.
Важной особенностью преобразователя частоты Lenze 8400 Vector Highline является трехконтурная система управления электроприводом с Пи-регуляторами тока, скорости и внешним П-регулятором контура положения. В этом случае при наличии датчика обратной связи по скорости (энкодера) обеспечивается удержание вала асинхронного электродвигателя в заданном положении при наличии нулевого сигнала задания по положению. Поскольку электропривод «питателя» не подвержен действию резкопеременных нагрузок и в основном работает при стационарных ускорениях/замедлениях в процессе работы, при хорошей настройке параметров ПИ-регулятора скорости, П-регулятора положения оказывается вполне достаточно для обеспечения высокой точности стабилизации положения пленки. Еще одним преимуществом преобразователя частоты 8400 Vector Highline является наличие быстродействующего и более медленного частотных каналов, что позволяет подключить одновременно два энкодера. К быстродействующему частотному каналу подключается фотоимпульсный датчик угловой скорости, установленный на валу асинхронного двигателя, в то время как к более медленному частотному каналу подключается фотоимпульсный датчик линейного перемещения, устанавливаемый непосредственно на упаковочную пленку.
Также важной особенностью преобразователя частоты, работающего в упаковочных системах, является наличие дискретного входа для подключения датчика метки, так называемого Touch Probe. В связи с проскальзыванием пленки возможно накопление ошибки позиционирования и смещение рисунка упаковочного пакета относительно места запайки. Для исключения такого эффекта используется цветная метка, наносимая на боковые поверхности пленки для определения точного положения пакета. Наличие метки определяется с помощью быстродействующего фотоэлектрического дискретного датчика, подающего сигнал на преобразователь частоты о достижении заданной точки позиционирования. Окно настроек параметров работы такого датчика, подключаемого к преобразователю частоты, имеет вид, представленный на рис. 2.
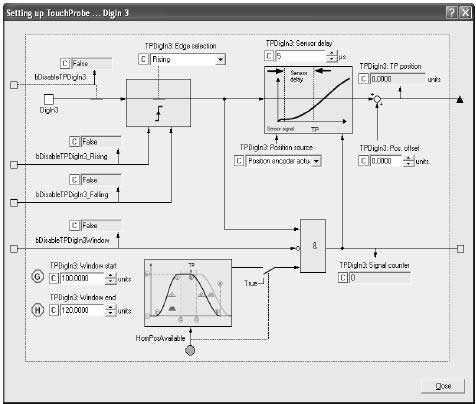
Рисунок 2 – Окно настроек датчика метки при программировании преобразователя частоты
Основными параметрами настройки, определяющими работу системы позиционирования, являются тип фронта срабатывания датчика Touch Probe, задержка срабатывания датчика, зона срабатывания датчика.
При срабатывании датчика внутри зоны ожидания, определяемой параметрами Window start и Window End, профиль позиционирования изменяется и точка конечного положения смещается относительно первоначальной. При этом преобразователь частоты обеспечивает отработку профиля, номер которого определяется значением параметра TP profile.
Таким образом, можно сформулировать следующие требования к преобразовательным устройствам для управления электродвигателями упаковочных механизмов, исходя из особенности их эксплуатации:
- в преобразователе частоты должны иметься два частотных канала для подключения независимого фотоимпульсного датчика угловой скорости двигателя и датчика линейного перемещения пленки;
- должна быть предусмотрена возможность отработки профиля положения при подаче дискретного сигнала на вход преобразователя частоты;
- встроенная система управления электроприводом должна содержать внешний контур регулирования положения, при котором обеспечивается стабилизация положения пленки при отсутствии сигнала на перемещение;
- в преобразователе частоты должен быть предусмотрен вход для подключения датчика метки Touch Probe для точного позиционирования при проскальзывании упаковочной пленки.
ВЫВОДЫ
Увеличение конкурентоспособности упаковочного оборудования украинских производителей возможно за счет снижения стоимости используемых составляющих систем электропривода. В частности, в случае применения преобразователей частоты 8400 Vector Highline компании Lenze, обеспечивающих работу асинхронных двигателей в режиме позиционирования, становится нецелесообразным использование синхронных серводвигателей с соответствующими системами управления. Использование вышеуказанных преобразователей частоты также позволяет уменьшить вычислительную загрузку программируемого логического контроллера, используемого для управления автоматикой. Дальнейшее увеличение производительности упаковочных механизмов возможно за счет синхронизации по скорости и положению взаимосвязанных систем электропривода. Так, в частности, возможен обмен данными между преобразователями частоты «питателя» и «запайщика» с применением частотных каналов передачи данных либо встроенного последовательного интерфейса CAN.
ЛИТЕРАТУРА
1. Регулируемый электропривод механизмов подачи упаковочного оборудования / Д.А. Абдураманов, А.В. Торопов // Упаковка.
– К.: ІАЦ "Упаковка", 2008. – С. 40–42.
2. L-Force drives 8400 Hardware Manual [Электронный ресурс], руководство по эксплуатации. – Электронные данные. – Хамельн, 2011. – Режим доступа: http://src.lenze.com/lenzebibliothek/en/_start.htm