Аннотация
Милых В.И., Майстренко А.М. Частотный преобразователь управляющий потерями асинхронного двигателя Точное измерение потерь мощности преобразователей и двигателей с высоким КПД – сложный процесс, а дополнительные трудности вызваны сигналами с широтно импульсной модуляцией (ШИМ). Скоро, двигатели снабженные преобразователями и системы механического привода будут иметь собственную классификацию эффективности. Кроме того, должны быть определены методы учета потерь в устройстве, и поданы соответствующие стандарты. Эта работа содержит результаты измерения потерь 37 кВт АД с синусоидальной и широтно-импульсной модуляцией. Пять различных типов преобразователей частоты использовались для того, чтобы получить единственные потери двигателя.
I. Введение.
Введение инструкций касательно эффективности использования энергии по всему миру создало такое определение как потери, и соответственно, эффективность использования энергии асинхронного двигателя является одной из наиболее важных тем. В настоящее время несколько стандартов IEC находятся на стадии рассмотрения или развития. Стандарт IEC 60034-1: Вращение электрической машины – Часть 1: Производительность и характеристика [1] находится на рассмотрении и его публикация ожидается в 2014 году. В следующем пересмотре стандарта также снабженные преобразователям машины, как ожидается, получат свои классы эффективности. Стандартный IEC 60034-2-1: Вращение электрических машин – Часть 2-1: Стандартные методы определения потерь и эффективности с помощью тестирования (исключая машины для транспортных средств тяги) [2] находится на стадии рассмотрения, и уже в 2013 году ожидается его публикация. Этот стандарт был предметом многих научных статей, таких как [3] – [5]. Пересмотр стандарта IEC 60034-2-1 [6] будет иметь значительное отличие от первого издания, так как будет изменен порядок выполнения одного из тестов, т.к.до этого порядок испытаний и измерений точек в тесте были фиксированы, а минимальная точность измерительных приборов постоянно увеличивалась. Стандарт IEC 60034-2-3: Вращение электрических машин – Часть 2-3: Методы определения потерь и эффективности машин переменного тока ,которые снабжены преобразователями с помощью тестирования [7] на данный момент разрабатывается, и ожидается, что он вступит в силу течении 2013 года. Канадская Ассоциация Стандартов работает над развитием стандарта CSA 838: Методы определения эффективности использования энергии для трехфазных систем приводов переменной частоты. Также ведутся действия по развитию стандарта в соответствии с экологическими принципами, который будет определять энергию требуемую для эффективной работы полных приводных модулей (CDM) и систем механического привода (PDS). Этот стандарт будет определяет IE классы и обеспечивать пределы, а также процедуры проверки для их классификаций. Преобразователи напряжения используются почти четыре десятилетия, но до сих пор КПД преобразователя вызывает интерес как объект стандартизации и классификации уровня эффективности.
В настоящее время существует руководство IEC 60034-17:Индукционные двигатели с короткозамкнутым ротором снабженные преобразователями [8] и стандарт IEC 60034-31: Руководство по выбору и применению энергосберегающих двигателей в том числе с переменной скоростью работы [9]. В [10] показано, что в различных испытательных лабораториях один тот же двигатель показывает очень разные результаты.Испытанием серии Round Robin было доказано, что потери на уровне 15% допустимы и является разумным. Это показывает, что определение КПД даже связанных сетью машин весьма проблематично определить. Определение побочных потерь найболее изучаемая и подверженная критике проблема. Дополнительные гармонические потери, вызванные методами ШИМ были широко изучены в литературе, например, в [16] - [23] . Тем не менее, там не существует никакого общепринятого способа определить дополнительные гармонические потери и узнать зависят ли они от нагрузки или нет.
Как говорилось ранее, эта работа содержит результаты измерения потерь 37 кВт АД с синусоидальной и широтно-импульсной модуляцией. Пять различных типов преобразователей частоты использовались для того, чтобы получить единственные потери двигателя, причем два типа этих преобразователей работают на двух различных частотах переключения. Определенные принципы строения и работы преобразователей опущены для того, чтобы их производители не могли быть идентифицированы.
Эта статья организована следующим образом. Раздел II дает подробное описание лабораторного оборудования, используемого при проведении опытов. Раздел III концентрируется на измерении КПД двигателя с синусоидальным питанием. В разделе IV приводятся и анализируются преобразователи частоты управляющие потерями двигателя. Раздел V состоит из обсуждения результатов и в последнем разделе приведены выводы касательно всей работы.
Таблица 1 Параметры двигателя при соединении в треугольник

II. Лабораторные измерения
Схема лабораторной установки приведена на рис-1. Во время измерений все данные непрерывно собираются с 10-секундным интервалом через интерфейс LabVIEW, для получения разных данных с точно такой же отметкой времени. Электрическая мощность измеряется с 12 -канальным анализатором Yokogawa оборудованным высокоточной Hitec Zero-Flux CURACC системой измерения тока (до 300 А). Скорость вращения и крутящий момент определяются с помощью HBM T12. Температура окружающей среды измеряется в три этапа. Датчики PT -100 установлены в 210 мм от стороны, противоположной приводу и по бокам машины. Температурные датчики со схемами компенсации и четырьмя проводами установлены с помощью системы Keithley 2701. Полученные и накопленные данные с Keithley 7702 передаются по 40-модульному дифференциальному каналу мультиплексора. Разрешение системы составляет 0,01 К, а точность ± 0,06 К плюс ошибка датчика ± (0,15 + 0,002 | Т | ) К.Точность измерения приборов приведена в таблице II .Те же самые методы измерения используется в [24] для получения потери двигателя с синусоидальной и ШИМ системой снабжения одновременно с помощью калориметрического метода и метода измерений на входе и выходе. Последний метод показал, что он для расчета изменения потерь непригоден и поэтому лучше использовать калориметрический метод. Вообще в электрическом двигателе при преобразовании одного вида энергии в другой часть энергии теряется в виде теплоты, рассеиваемой в различных частях двигателя. В электрических двигателях имеются потери энергии трех видов: потери в обмотках, потери в стали и механические потери. Кроме того, имеются незначительные добавочные потери. Повышение температуры двигателя – главный покозатель определение размеров, то есть один из важнейших факторов в процессе проектирования, и этот фактор также может использоваться в качестве индикатора изменений потерь [25].
III. Опыты измерений КПД
Измерения КПД проводятся в соответствии проекту стандарта МЭК 60034-2-1 Во 2-ом издании опыт выполняют два раза, чтобы уменьшить влияние ошибок измерений, в результате используя метод B - суммирование потерь. Тест холостого хода выполняется сразу после нагрева, когда двигатель еще находится в нагретом состоянии. Это значительное изменение 2-го издания по сравнению с первым. В результате получается более низкое трение и соответственно меньше потери сопротивления в взаимодействии воздуха со смазкой в подшипниках. Трения и потери сопротивление воздуха являются главными факторами влияющими на температуру двигателя. Два испытания холостого хода (одна с холодным двигателем и еще одного с горячим) а затем дополнительный пробег без нагрузки были выполнены. В опыте первого холостого хода,температура обмотки статора была 24 ° C с холодным двигателем, а во втором опыте 92 ° С с горячем двигателем, когда трение и потери сопротивление воздуха составили 272 Вт и 147 Вт, соответственно. Опыт пуска двигателя под нагрузкой на обмотку при температуре выше 100°С и опыт пуска дополнительной нагрузки на муфту вала был удален. После этого двигатель охлаждали в течение опыта холостого хода. Потери холостого хода поддерживали температуру обмотки двигателя чуть более 40°С. Потери в стали предполагаются постоянными во время холостого хода и коррекция температурных потерь обмотки статора проводилась в расчете трения и сопротивление воздуха в зависимости от времени на рис. 2.

Рисунок 1 Измерительная схема
Таблица 2 Измерительный прибор точности


Рисунок 2 Трение и потери сопротивления воздуха и температура обмотки в зависимости от функции время.
Показатели потерь и повышения эффективности измерений приведены в таблице III и составляющие этих потерь в таблице IV. Показатели потерь немного увеличились во время проведения второго измерения. Такие показатели как: скольжение, температура, и ток статора также немного увеличились. Перед этой серией измерений, кривая температуры обмотки сопротивления была найдена. Во время проведения опыта холостого пробега с тепловой номинальной нагрузкой, температура обмоток двигателя состовляла 91,1°С и 91,6 ° С соответственно, а сопротивления обмоток составило 111 мОм. При анализе синусоидального снабжения, кривая сопротивление температуры используются вместо измерения сопротивления.
Таблица 3 Индикаторы потерь и эффективность

Таблица 4 Потери в моторе сонласно IEC 60034-2-1

Эта процедура гарантирует, что там не существует погрешности в измерениях сопротивления из-за слабого контакта между измерительным прибором и двигательным терминалом, и результаты измерение сопротивления обмотки статора сопоставимы друг с другом. КПД в таблице III рассчитываются с использованием механической энергии вала P2 вместо использования потребляемой электрическая мощность P1. КПД можно вычислить с помощью данных как на входе так и на выходе с помощью известных уравнений известными уравнениями.


В этом случае, это означает, то, что когда общие потери двигателя корректируются на эталонную температуру КПД рассчитанные с помощью мощностей на входе и на выходе будут немного отличается друг от друга. Наиболее разумно использовать мощность на выходе при расчете КПД из-за того, что если потери двигателя будут больше, двигатель возьмет больше мощности от сети, чтобы преодолеть эти большие потери. Коэффициент корреляции составил ? 99,9% в серии измерений.
Результаты, приведенные в таблицах III и IV показывают, процедура измерения КПД IEC дает сопоставимые результаты с реальным КПД . Прямое измерение КПД на входе и на выходе является более чувствительным к ошибкам измерений, чем метод МЭК.
IV. Питание преобразователя
Два тепловых теста при нагрузке были выполнены с каждым преобразователем частоты. Опыты были проведены при частоте 50 Гц и 45 Гц , и при 100% и 81% номинальном моменте двигателя. Кроме того, тепловой опыт выполненный при частоте 45 Гц осуществлялся при снабжении питанием генератором. Во время опыта при частоте 50 Гц было увеличено входное напряжение преобразователя, чтобы избежать ослабления магнитного поля и достичь снижения времени состояние перегрузки двигателя. В каждом опыте было взято напряжение равное номинальному напряжению двигателя. Максимально допустимый момент с номинальной частотой вращения был достигнут при подаче из преобразователя примерно 92% от номинального крутящего момента (в зависимости от производителя двигателя). Таким образом, скольжение двигателя и ток статора больше, чем номинальное скольжение (1,2%) и номинальный ток (65,4) в измерениях преобразователя частоты с номинальной нагрузкой. Поскольку напряжение основной гармоники равна номинальному напряжению двигателя, и механическая мощность имеет то же самое значение как и все преобразователями, амплитуда тока статора непосредственно связана с потерями двигателя. При 45 Гц входное напряжение преобразователя равно номинальному напряжению двигателя. Таким образом, преобразователь частоты работает над линейной модуляцией и, следовательно, при возврате их к точке измерения результаты должны быть полностью сопоставимы.
Во время всех этих измерений были использованы кабели в цепях питания преобразователя и, также, от преобразователя к двигателю. Длина входного кабеля преобразователя 12 метров и кабеля от преобразователя на двигатель 8 метров.
А. Потери двигателя
Преобразователи частоты на рис. 3-8 помечены числами. Первый преобразователь использует пространственно-векторную модуляцию с частотой 4кГц и второй такой же, преобразователь с частотой 2 кГц. Пятый и шестой те же преобразователи, но с возможностью переключений на высокую и низкую частоты, соответственно.

Рисунок 3 Потеря и повышение температуры по сравнению с синусоидальной результатов снабжения в 45 Гц и 50 очков Гц.
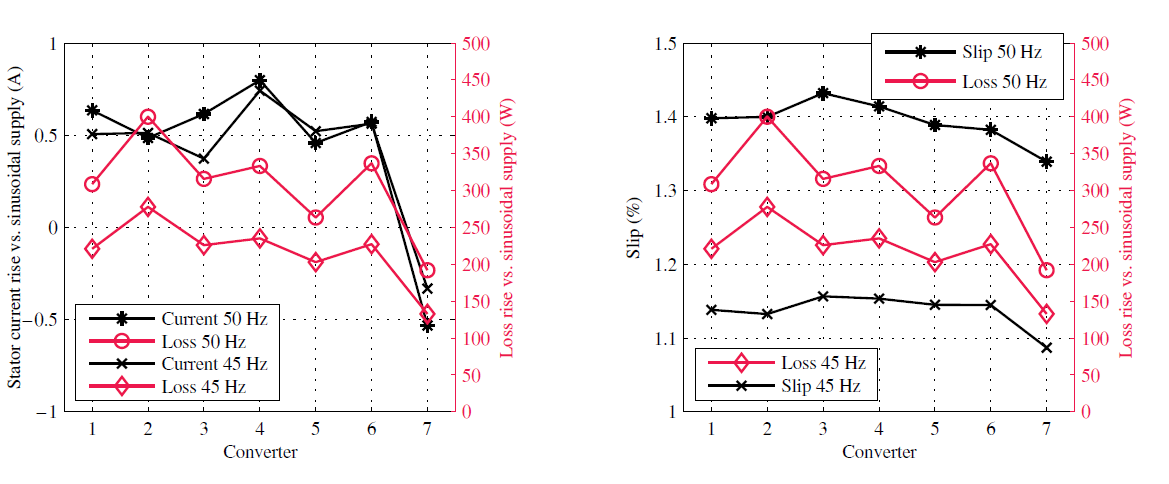
Рисунок 4-5 Потеря поднимается и статора RMS текущее значение по сравнению с синусоидальной питания Результаты в 45 Гц и 50 Гц точек. / Потеря поднимается против синусоидальной и скольжения двигателя в 45 Гц и 50 Гц измерения точек. Синусоидальный скольжения питания в 50 Гц Дело в том, 1,33% и в 45 Гц точки 1,12%.
Список использованной литературы
[1] Rotating electrical machines – Part 30: Efficiency classes of singlespeed, three-phase, cage-induction motors (IE-Code), Ed. 1, IEC 60034- 20, November 2008.
[2] Rotating electrical machines – Part 2-1: Standard methods for determining losses and efficiency of rotating electrical machinery from tests (excluding machines for traction vehicles), Ed. 1, IEC 60034-2-1, September 2007.
[3] W. Cao, “Assessment of induction machine efficiency with comments on new standard IEC 60034-2-1,” in Proc. 18th Int. Conf. on Electrical Machines, Vilamoura, Portugal, September 2008, pp. 1–6.
[4] W. Cao, “Comparison of IEEE 112 and New IEC Standard 60034-2-1,” IEEE Trans. Energy Convers., vol. 24, no. 3, pp. 802–808, September 2009.
[5] A. Boglietti, A. Cavagnino, and S. Vaschetto, “Induction motor EU standards for efficiency evaluation: The scenario after IEC 60034-2-1,” in Proc. 37th Annu. Conf. on IEEE Industrial Electronics Society, Melbourne, Australia, November 2011, pp. 2786–2791.
[6] Rotating electrical machines – Part 2-1: Standard methods for determining losses and efficiency of rotating electrical machinery from tests (excluding machines for traction vehicles), Ed. 2, IEC 60034-2-1 CD, December 2011.
[7] Rotating electrical machines – Part 2-3: Specific test methods for determining losses and efficiency of converter-fed AC machines, Committee draft, IEC 60034-2-3, August 2010.
[8] Rotating electrical machines – Part 17: Cage induction motors when fed from converters – Application guide, Ed. 4, IEC 60034-17, May 2006.
[9] Rotating electrical machines – Part 31: Guide for the selection and application of energy-efficient motors including variable-speed applications, Ed. 1, Draft technical specification, 2/1575/DTC, IEC/TS 60034-31, September 2009.
[10] A. Mohle, “Determination of motor efficiency on the basis of IEC600034-2-1 Round-Robin testing for the improvement of the standard,” in Proc. 2010 Motor Summit, Zurich, Switzerland, October 2010, pp. 38–39.
[11] W. Cao, K.J. Bradley, J.C. Clare, and P.W. Wheeler, “Comparison of stray load and inverter-induced harmonic losses in induction motors using calorimetric and harmonic injection methods,” IEEE Trans. Ind. Appl., vol. 46, no. 1, pp. 249–255, January/February 2010.
[12] A.C. Machado, J.E. de S. Pacheco, M.V. Ferreira de Luz, C.G.C Neves, and R. Carlson, “Stray load losses calculation routine based on the ehstar method,” in Proc. 18th Int. Conf. on Electrical Machines, Vilamoura, Portugal, September 2008, pp. 1–4.
[13] K. Stockman, S. Dereyne, D. Vanhooydonck, W. Symens, J. Lemmens, and W. Deprez, “Iso efficiency contour measurement results for variable speed drives,” in Proc. 19th Int Conf. on Electrical Machines, Rome, Italy, September 2010, pp.1–6.
[14] D. Vanhooydonck, W. Symens, W. Deprez, J. Lemmens, K. Stockman, and S Dereyne, “Calculating energy consumption of motor systems with varying load using iso efficiency contours,” in Proc. 19th Int. Conf. on Electrical Machines, Rome, Italy, September 2010, pp. 1–6.
[15] W. Deprez, J. Lemmens, D. Vanhooydonck, W. Symens, K. Stockman, S. Dereyne, and J. Driesen, “Iso efficiency contours as a concept to characterize variable speed drive efficiency,” in Proc. 19th Int. Conf. on Electrical Machines, Rome, Italy, September 2010, pp. 1–6.
[16] E.N. Hidebrand and H. Roehrdanz, “Losses in three-phase induction machines fed by PWM converter,” IEEE Trans. Energy Convers., vol. 16, no. 3, pp. 228–233, September 2001.
[17] A. Boglietti, A. Cavagino, A.M. Knight, and Y. Zhan, “Factors affecting losses in induction motors with non-sinusoidal supply,” in Conf. Rec. 2007 IEEE Industry Applications Conf. 42nd IAS Annu. Meeting, vol. 1, New Orleans, LA, USA, September 2007, pp. 1193–1199.
[18] J.-J. Lee, Y.-K. Kim, H. Nam, K.-H. Ha, J.-P. Hong, and D.-H. Hwang, “Loss distribution of three-phase induction machines fed by pulsewidthmodulated inverter,” IEEE Trans. Magn., vol. 40, no. 2, pp. 762–765, March 2004.
[19] Y. Wu, R.A. McMahon, Y. Zhan, and A.M. Knight, “Impact of PWM schemes on induction motor losses,” in Conf. Rec. 2006 IEEE Industry Applications Conf. 41st IAS Annu. Meeting, vol. 2, Tampa, FL, USA, October 2006, pp. 813–818.
[20] A. Ruderman, “Electrical machine PWM loss evaluation basics,” Energy efficiency in motor driven systems, Heidelberg, Germany, September 2005.
[21] Y. Zhan, A.M. Knight, Y. Wu, and R.A. McMahon, “Investigation and comparison of inverter-fed induction machine loss,” in Proc. IEEE Industry Applications Society Annu. Meeting, Edmonton, Alberta, Canada, October 2008, pp. 1–6.
[22] A. Boglietti, A. Cavagnino, and A. M. Knight, “Isolating the impact of PWM Modulation on Motor Iron Loss,” in Proc. IEEE Industry Application Society Annu. Meeting, Edmonton, Alberta, Canada, October 2008, pp. 1–7.
[23] Z. Gmyrek, A. Boglietti, and A. Cavagnino, “Estimation of iron losses in induction motors: Calculation method, results, and analysis,” IEEE Trans. Ind. Electron., vol. 57, no. 1, pp. 161–171, January 2010.
[24] L. Aarniovuori, A. Kosonen, M. Niemela, and J. Pyrhonen, “Calorimetric measurement of variable-speed induction motor,” in Proc. 20th Int. Conf. on Electrical Machines, Marseille, France, September 2012, pp. 870–876.
[25] L. Aarniovuori, L. Laurila, M. Niemela, and J. Pyrhonen, “Measurements and simulations of DTC voltage source converter and induction motor losses,” IEEE Trans. Ind. Electron., vol. 59, no. 5, pp. 2277–2287, May 2012.
[26] L. Aarniovuori, L. Laurila, M. Niemela, and J. Pyrhonen, “Loss calculation of a frequency converter with a fixed-step circuit simulator,” in Proc. 12th European Conf. on Power Electronics