ВВЕДЕНИЕ.
Проблема экстренной эвакуации персонала при авариях в шахтных стволах является актуальной не только для горнодобывающих шахт Украины. Как показывает опыт работы горноспасательных служб развитых зарубежных стран, основными средствами для эвакуации людей из клетей и подземных горизонтов являются мобильные подъемные установки с автономным электроснабжением (рисунок 1).
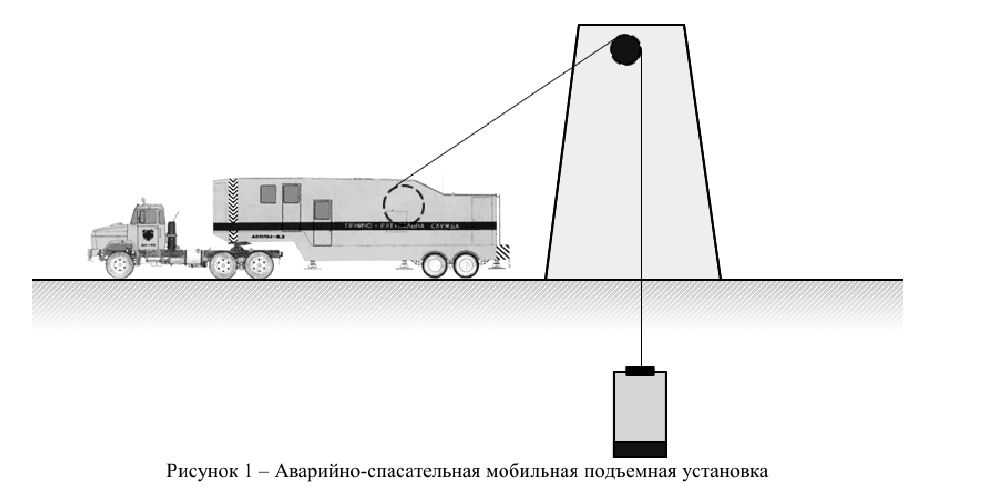
Наиболее приемлемым средством при аварийно-спасательных работах в стволах являются мобильные подъемные установки с автономным электроснабжением, которые должны использоваться для эвакуации людей из подземных горизонтов шахт и клетей (при их зависании в армировке ствола с продолжительным отказом оборудования основной подъемной установки или исчезновении напряжения в системе энергоснабжения шахты). Это подтверждается практикой применения мобильных аварийных лебедок горноспасательными службами зарубежных стран и анализом ситуаций, возникающих из-за отсутствия такого оборудования в Украине и странах СНГ.
Сложности в применении мобильных установок заключаются в том, что все шахты имеют разные поверхностные комплексы и подъездные пути к стволам, в которых может возникнуть необходимость применения такой установки. При этом практически невозможно установить блок подъемной машины на необходимом расстоянии относительно копра и обеспечить условия выполнения требований параграфа 364 Правил технической эксплуатации, которые сформулированы по отношению к максимальной длине и углу наклона струны каната для стационарных подъемных установок, сложно обеспечить значение углов девиации каната относительно отклоняющего шкива в тех же допустимых границах, что и для стационарной установки. Это значит, что мобильный аварийно-спасательный комплекс вынужденно должен эксплуатироваться в технических условиях с запредельными, по сравнению со стационарными установками, эксплуатационными параметрами.
При аварийном торможении в механической системе мобильной подъемной установки возникают экстремальные динамические режимы, которые сопровождаются интенсивными продольными и поперечными колебаниями вертикального отвеса каната и его наклонной струны. Поэтому влияние динамических процессов в наклонной струне на динамику сосуда в отвесе каната при мобильном варианте подъемной установки становится очень значительным, а параметры динамических отклонений струны каната в вертикальной и горизонтальной плоскостях при торможении могут достигать значений, которые способны привести к выходу каната за реборды шкива и аварийному срыву каната с отклоняющего шкива.
Это делает задачу определения допустимых значений геометрических и функциональных параметров работы оборудования мобильной установки в реальных условиях шахтного стола (каната, его струны, отклоняющего шкива, подъемной машины относительно копра, настройки аварийного тормоза с учетом особенностей динамических процессов в отвесе и струне каната при всех практически возможных вариантах применения в реальных шахтных условиях) чрезвычайно актуальной с научной и практической точек зрения.
Целью данной статьи является исследование динамических процессов в системе «наклонная струна-отвес-спасательная клеть» мобильной аварийно-спасательной подъемной установки на основе численного интегрирования разрешающей системы дифференциальных уравнений (1), полученной в работе [1].
где mcmp, mгр, mR, С , lk , µ, y, x, j(t), Fст, , Tm, txx – соответственно, приведенные к окружности барабана массы струны, отвеса с грузом, вращающихся частей подъемной машины, жесткость отвеса каната на растяжение, угол наклона струны к горизонту, полная длина каната, коэффициент затухания в канате, поперечные перемещения середины струны каната, вертикальные перемещения клети, окружное ускорение барабана, статическое тормозное усилие, кратность тормоза, постоянная тормоза, единичная функция Хэвисайда.
Уравнения учитывают взаимное влияние динамических процессов в наклонной струне и отвесе каната, геометрические и инерционные параметры элементов системы.
РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ.
Для проведения численной обработки и анализа математической модели (1) было реализовано программное решение при помощи средств, доступных в прикладном математическом пакете Wolfram Mathematica.
Функцией основного программного модуля является моделирование динамических процессов в канате мобильной подъемной установки в режиме торможения. Решение строится с использованием адаптированного численного метода Рунге-Кутта.
Результатом решения системы дифференциальных уравнений (1) являются зависимости относительных поперечных перемещений центра струны каната y(t) , вертикальных перемещений подъемного сосуда x(t) и замедления барабана j(t) , вычисленные на моделируемом промежутке времени.
Для анализа поведения динамических усилий в канате введен специальный параметр – коэффициент динамичности, представляющий собой отношение динамического усилия в нижнем сечении каната к статическому усилию. Характерным является его максимальное значение на всем промежутке численного моделирования

Анализ зависимости коэффициента динамичности от различных параметров подъемной установки проводится следующим образом: при фиксированных параметрах модели подъемной установки, один исследуемый параметр изменялся в определенном диапазоне с заданным шагом, достаточным чтобы получить 20-50 контрольных точек. Для каждой контрольной точки решалась система дифференциальных уравнений (1) и вычислялось максимальное значение коэффициента динамичности (2) на всем вычисленном промежутке времени.
На приведенном ниже рисунке 2 показаны результаты моделирования поведения коэффициента динамичности в нижнем сечении каната от изменяющейся длины струны для кратности тормозного усилия веса концевого груза Q = 28300 H , длина отвеса каната составляет lотв = 600 м .

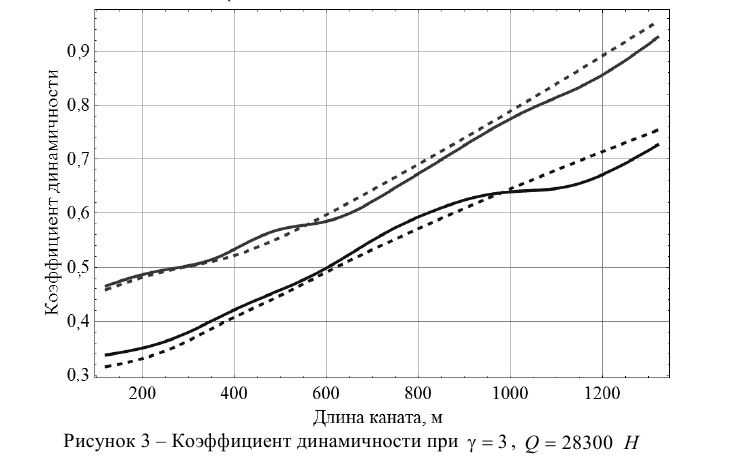
На рисунке 3 приведены графики зависимости коэффициента динамичности в нижнем сечении каната от изменяющейся длины отвеса, для кратности тормозного усилия равного 3 и веса концевого груза Q= 28300H. Длина струны каната – lcmp =120м .
При изменении длины отвеса каната при спуске/подъеме клети происходит изменение собственных частот колебаний системы «струна-отвес», а при срабатывании предохранительного тормоза начинается интенсивный колебательный процесс в наклонной струне и отвесе каната с грузом, который сопровождается взаимным обменом энергией колебаний между струной и отвесом через направляющий блок (рисунок 1). При этом периодически изменяется длина каната на участках наклонной струны и вертикального отвеса. Этот колебательный процесс относится к типу параметрических. Поэтому явление поочередного нарастания амплитуд поперечных колебаний в струне и вертикальных в отвесе по типу «биения», которое происходит при определенных соотношениях парциальных частот системы (а, значит, и длин участков каната), можно назвать внутренним параметрическим резонансом.
В зависимости от значений параметров тормоза и скорости подъема в момент его срабатывания в зонах параметрического резонанса максимальная амплитуда колебаний клети и струны может меняться в несколько раз. В самых неблагоприятных случаях может происходить аварийноопасное набегание клети на канат с его ослаблением и соударение струны с конструкциями копра.
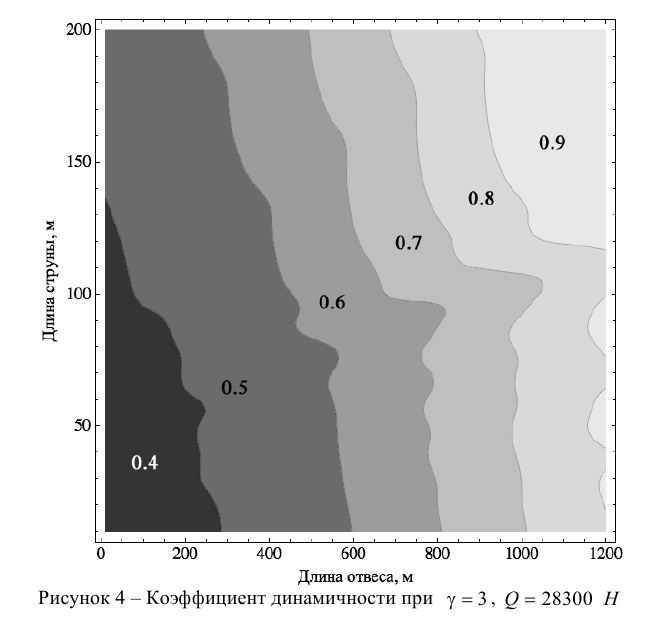
Для определения положения зон параметрических резонансов в зависимости от коэффициента динамичности kmax(lcmp,lотв) и от длин отвеса и струны каната были построены соответствующие контурные графики. Пример такого графика приведен на рисунке 4.
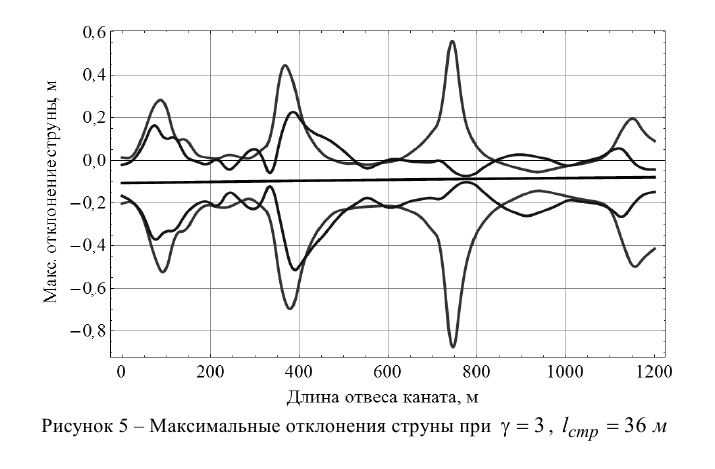
При размещении мобильной подъемной установки в реальных условиях шахт согласно проекту ее применения зачастую наклонная струна располагается близко от различных технических сооружений. Во время торможения амплитуда поперечных колебаний струны может быть настолько большой, что приведет к ее соударению с элементами надшахтных зданий и возникновению аварийной ситуации. Поэтому учет максимальных отклонений точек струны, как от прямой линии, так и от положения равновесия является важной теоретической и практической задачей, которой должно быть уделено внимание при выборе эксплуатационных параметров аварийно-спасательной подъемной установки.
Так для исследования зависимости максимальных отклонений центра струны каната в режимах спуска и подъема груза от его положения в стволе был проведен ряд вычислительных экспериментов. При фиксированных параметрах системы для кратности тормозного усилия равного 3 и длины струны каната =63 pm clм варьировалась длина отвеса каната и вычислялись значения максимальных отклонений струны каната вверх и вниз, а также, для сравнения, вычислялось отклонение струны каната в положении равновесия. Результаты этих численных экспериментов приведены на рисунке 5.
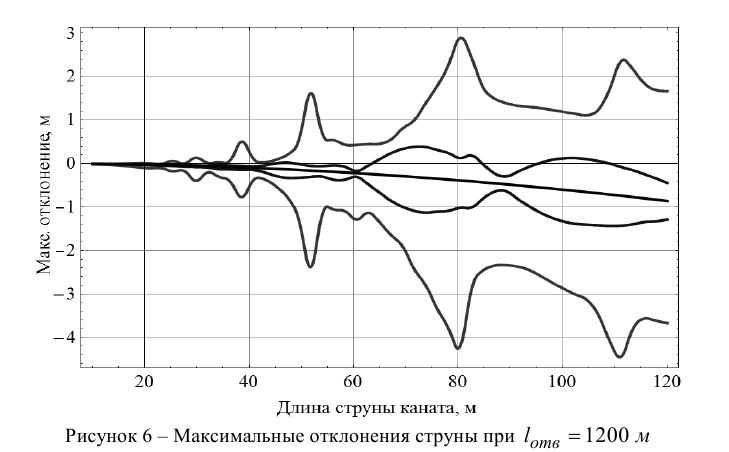
Аналогичный ряд вычислительных экспериментов был проведен для исследования влияния длины самой струны на ее амплитудные характеристики. Для этого при фиксированных параметрах системы для трех значений длины отвеса каната lотв =1200 м варьировалась длина струны каната и вычислялись значения ее максимальных отклонений вверх и вниз в режимах спуска и подъема груза а также, для сравнения, вычислялось отклонение струны каната в положении равновесия (рисунок 6).
ВЫВОДЫ.
В результате проведенных численных экспериментов сделаны следующие выводы:
- Установлено, что наиболее опасным с точки зрения повышения динамических нагрузок в канате подъемной установки в общем случае является режим предохранительного торможения при подъеме груза.
- Самое значительное влияние на величину коэффициента динамичности системы оказывают такие параметры настройки тормоза, как интенсивность нарастания и кратность тормозного усилия. При завышенной кратности велика вероятность набегания сосуда на канат даже при малых длинах струны и отвеса каната.
- Увеличение длины отвеса каната (при неизменном весе клети) и уменьшение веса подъемного сосуда (при неизменной дине отвеса) ведут к повышению коэффициента динамичности в канате подъемной установки.
- Учет влияния поперечных колебаний струны каната приводит к повышению коэффициента динамичности системы, в частности, увеличение длины струны с 10 м до 200 м вызывает увеличение коэффициента динамичности на 20-30 %, уменьшение угла наклона струны с 90 град до 0 град – увеличение коэффициента динамичности на 5-10 %.
Полученные результаты могут быть использованы при синтезе системы программного управления тормозом мобильной подъемной установки, исключающей возникновение аварийноопасного набегания клети на канат при торможении в зонах параметрического резонанса.
Список использованной литературы
1. Ильин С.Р. Экспериментальные исследования динамики мобильной аварийно-спасательной
подъемной установки в режиме предохранительного торможения / С.Р. Ильин, С.В. Самуся // Стальные
канаты. — 2009. — Вып. 7. — С. 60–65.
2. Ильин С.Р. Математическая модель нелинейных колебаний струны и отвеса каната мобильной
подъемной установки / С.Р. Ильин С.В. Самуся // Наукові праці ДонНТУ. Сер. гірничо-електромеха-
нічна. — 2008. — Вип. 16 (142). — С. 122–131.
3. 3. Ильин С.Р. Исследование жесткостных характеристик системы «струна - отвес каната - сосуд»
аварийно-спасательной мобильной подъемной установки / С.Р. Ильин, С.В. Самуся // Гірнича електро-
механіка та автоматика: наук.-техн. зб. — 2009. — Вип. 82. — С. 142–148.
4. Степанов А.Г. Динамика машин / А.Г. Степанов. — Екатеринбург: УрО РАН, 1999. — 392 с.