Аннотация
Данная работа представляет собой сравнение двух наиболее пополуярных методов управления двигателем переменного тока: поле ориентированное и прямое управления моментом. Сравнение основывыется на различных критериях включая основные свойста управления, производительность в динамике и сложность реализации. Анализ проведен с помощью моделирования используюя Simulink Power System Block set, который позволяет полностью представить силовую часть и управляющую.
I. Вступление
Регулирование скорости или регулирование момента электроприводов - решающие компоненты в почти всех современных промышленных производственных процессах. Обычно в регулируемом электроприводе использовались электродвигатели постоянного тока, но за последние 20 лет, двигатели переменного тока используются все больше в различном промышленном применении из-за производительности, которую они могут обеспечить.
Разработка высокоэффективных стратегий управления АД, подталкиваемая требованиями промышленности, быстро развивалась в течение последних двух десятилетий. Две высокоэффективных стратегии управления асинхронным двигателем это - ПОЛЕОРИЕНТИРОВАННОЕ УПРАВЛЕНИЕ (FOC) [1], [2], [3], [7], [11], [13] и ПРЯМОЕ УПРАВЛЕНИЕ МОМЕНТОМ (DTC) , [5], [6], [8], [9], [10], [12], [14].
Асинхронный двигатель или синхронный двигатель с постоянными магнитами (PMSM) регулируемые этими методами могут быть применен даже в высокоэффективных серво приводах, которые раньше управлялись исключительно ДПТ. Оба метода FOC и DTC позволяют независимо управлять моментом и потокосцеплением. В ДПТ, это разделение осуществляется электромагнитным способом, путем ориентации потокосцепления статора, используя коммутатор. В машинах АД это разделение получается путем математических преобразований, таким образом, избегая проблем связанных с коммутатором. Упомянутые методы управления подверглись значительному исследованию за последние 15 лет, но осталось несколько проблем : FOC очень зависит от знания постоянной времени ротора. DTC, в его традиционном виде, приводит к не постоянной частоте переключения инвертора, которая может привести к высоким потерям инвертора/двигателя. Методы которые решают эту проблему приводят к решениям, которые параметрически зависимы.
Цель этой работы состоит в том, чтобы представить сравнительное исследование этих двух схем управления, используя моделирование в Simulink Power System Block Set , который позволяет полностью представить силовую часть и систему управления. Управление электродвигателем переменного тока существенно улучшилось за последние два десятилетия. Это стало тенденцией благодаря новым методам управления и идеям, выдвигаемыми исследователями со всего мира. Реализация этих идей стала возможна благодаря техническим разработкам, таких как контроллеры DSP и новым силовым полупроводникам.
II. ИССЛЕДОВАНИЕ В ОБЛАСТИ РАЗВИТИЯ ПРОМЫШЛЕННОГО ПРЕДПРИЯТИЯ
Векторное управление начало разрабатываться приблизительно в 1970. Возможны несколько типов векторного управления: ориентированный на ротор, на потокосцепление ротора, на потокосцепление статора и на потокосцепление намагничивания. Цель векторного управления заключается в том, чтобы управлять электромагнитным моментом также раздельно как в ДПТ. Это возможно, если управление машиной осуществляется в синхронно вращающейся системе координат, где переменные представляются как постоянные величины в установившемся состоянии: поле ориентированное управление позволяет раздельно управлять потокообразующей и моментообразующей составляющими. Однако только ориентированное на потокосцепление ротора управление позволяет получить полное разделение. Выбор различной ориентации по потоку может перевесить отсутствие полного разъединения для некоторых специальные методов. Здесь рассмотрен только ориентированный на потокосцепление ротора тип управления, которое также называют Поле Ориентированным Управление(FOC). FOC может быть реализован как через feed-forward связь, так и прямую в зависимости от используемого метода для идентификации потокосцепления ротора. Прямой FOC определяет ориентацию потокосцепления в воздушном зазоре при помощи датчика использующего эффекта Холла, поиск обмотки или другие способы измерений. Однако использование датчиков очень дорогостояще из-за специальных модификаций двигателя, которые требуется для размещения датчиков. Кроме того, не возможно непосредственно определить потокосцепление. Вычисление потокосцепления может привести к погрешности на низких скоростях из-за преобладания падения напряжения на сопротивлении статора в уравнении баланса из-за изменения потокосцепления и температуры.
Электромагнитный вращающий момент может быть выражен в общем виде, связывая d-q компоненты переменных:

Вышеупомянутое уравнение представляет модель электро-механической динамики асинхронного двигателя в синхронных координатах. Электромагнитный момент выражен через токи статора и ротора. Ток ротора можно убрать из уравнения, и момент может быть выражен через ток статора и любое из трех потокосцеплений. Следующие методы векторного управления зависят от выбранного потокосцепления
Управление, ориентированное по потокосцеплению в воздушном зазоре
Все вышеупомянутые три метода векторного управления подобны по реакции на момент и параметрической чувствительности. Однако система, ориентированная по потокосцеплению ротора имеет следующие преимущества перед другими двумя методами:
- Схема управления более проста в реализации.
- Нет просадок момента, если нет никакого ограничения на питание тока статора. Система ориентированная по потокосцеплению ротора может быть классифицирована следующим образом:
- Метод потокосцепления или метод обратной связи, где вектор потокосцепления и ток статора асинхронного двигателя управляется на основании вектора потокосцепления (прямое векторное управление). Этот метод требует датчиков потокосцепления или модель для точного вычисления амплитуды и угла потокосцепления.
- Метод управления частотой скольжения где обратная связь это угловая скорость ротора которая прибавляется к вычисленной скорости скольжения для предсказания положения вектора потокосцепления и им в свою очередь управлять вектором тока статора(не прямое векторное управление).
В отличие от прямого векторного управления, косвенное векторного управления самый популярный метод в промышленном применении, где требуется широкий диапазон скорости и быстрая реакция момента.
Следующая часть касается не прямого векторного управления, ориентированного по потокосцеплению ротора. Не прямой векторный метод управления по сути похож на прямое векторное управление, кроме блока создания векторного сигнала

Уравнения цепей Статора и ротора асинхронного двигателя выглядят следующим образом
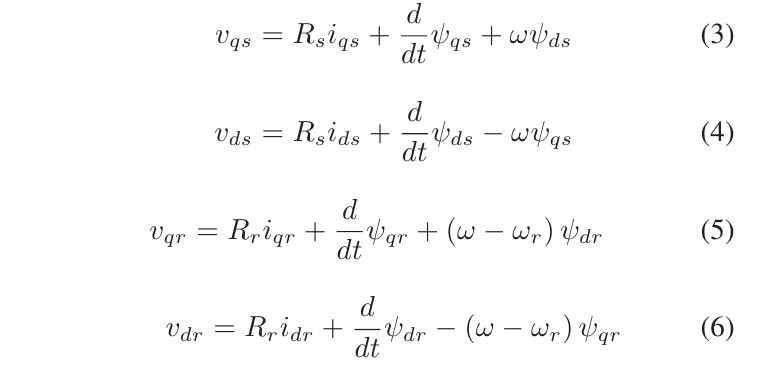
В синхронно вращающихся координатах.
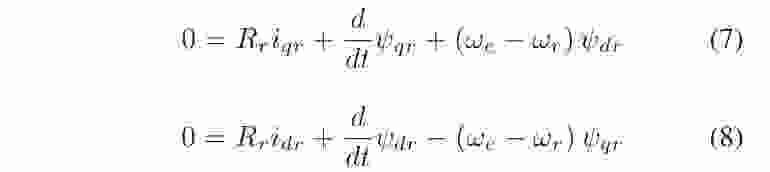
Уравнения потокосцепления ротора

Из вышеуказанных уравнений мы можем записать
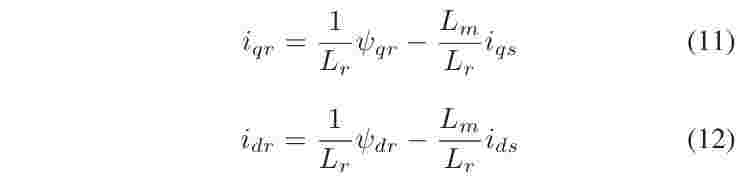
Токи ротора в Уравнениях (7) и (8), , могут быть выражены через (11) и (12)
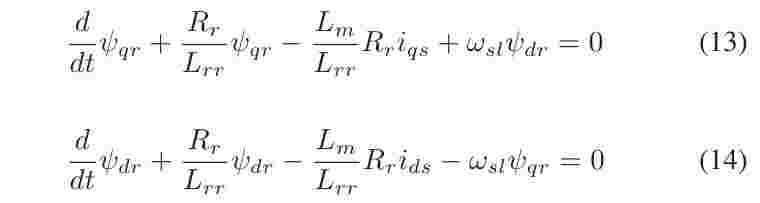
Заменяя условиями в Уравнении (13) и (14), мы получаем
Из выражения (15)

A. Реализация FOC в Simulink
Модель Simulink для классической ориентированной по потокосцеплению ротора векторное управление асинхронным двигателя показано на рис. 1. Она состоит из четырех блоков: модель асинхронного двигателя, инвертор PWM, и генератор напряжения управления и векторный контроллер. Управляющими входами являются - расчетная скорость и вращающий момент.
Блок векторного управления показан на рис. 3. Заданная скорость сравнивается с фактической скоростью ротора. PI регулятор обрабатывает ошибку и выдает моментообразующюю составляющую. Этот ток снова сравнивается с фактической моментообразующей составляющей тока. PI регулятор обрабатывает эту ошибку и вырабатывает сигнал задания. Блоки ”Go to” и ”From” используются, чтобы уменьшить сложность соединений. Потокосцепление вычисленное при помощи модели Блашке (как показано на Рис. 4) сравнивается с заданной величиной, чтобы выдать сигнал задания. Ошибка между токами обрабатывается PI-регулятором, чтобы выдать задания. Получение значение также показано на рисунке. Сигналы положительной ОС введены в цепи ids и iqs, для преодоления небольшого эффекта сопряжения. Другими словами, потокосцепление ротора прямо пропорционально d составляющей тока статора. Для реализации ориентации по потокосцеплению ротора можно использовать PWM модуляцию.
III. Прямое управление моментом
Прямое Управление моментом и Потоком (DTFC), который также называют Прямым Управление моментом (DTC), был разработан Немецкими и Японскими исследователями для использования в управлении моментом серводвигателей высокой мощности. Публикация теории DTC фактически была осуществлена в 1971. Недавно, она предоставила промышленную альтернативу FOC. DTC - это метод управления, который для создания момента и потокосцепления использует возможности для АД, питаемого от простого инвертора напряжения, который не требует контуров регулирования тока, при этом получая такую же производительность, что и в системах векторного управления. В приводе с прямым управлением моментом,
питаемого от инвертора напряжения, возможно напрямую управлять потоком и моментом выбором оптимального вектора напряжения.
Выбор вектора напряжения сделан, чтобы ограничить ошибку по потокосцеплению и моменту в пределах зоны гистерезиса и получить самую быструю реакцию момента и самую высокую эффективность в любой момент. В Прямом Управлении Моментом быстрая реакция момента может быть получена, выбором оптимального состояния переключения инвертора, если амплитуда потокосцепления поддерживается постоянной. Выражение электромагнитного момента может быть записано в следующей форме:

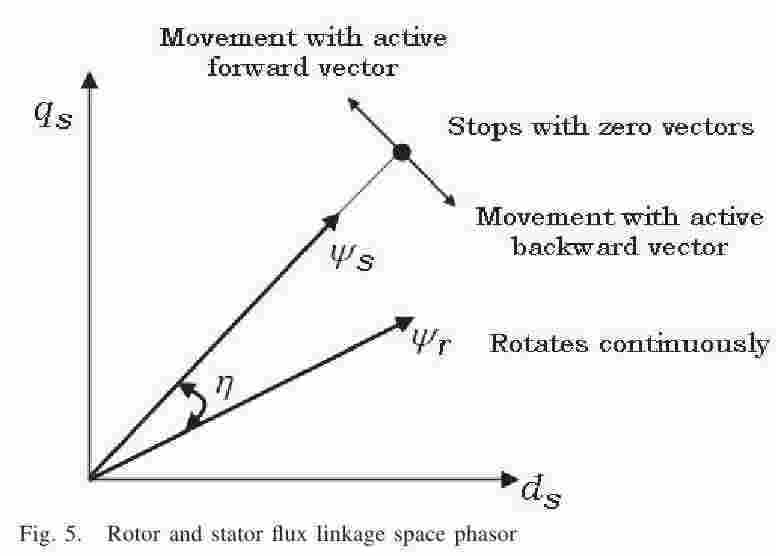
Можно представить вышеуказанное уравнение, в следующей форме используя диаграмму на рис. 5
Напряжение статора может быть описано следующим уравнением

Если пренебречь падением напряжения на статоре

Из уравнения (19) можно заметить, что напряжение инвертора непосредственно влияет на потокосцепление статора, требуемое положение будет получено, выбором соответствующего состояния ключей инвертора. Таким образом, потокосцепление статора перемещается в направлении напряжения статора со скоростью пропорциональной амплитуде вектора напряжения статора. Выбирая шаг за шагом, надлежащий вектор напряжения статора, можно получить требуемое потокосцепление статора.
Если требуется увеличение момента, то применяют векторы напряжения, которые перемещают вектор потокосцепления в направлении вращения. Если требуется уменьшение, тогда используют нулевые вектора
Если вектор потокосцепления статора находится в k-м секторе и двигатель вращается против часовой стрелки, вращающий момент может быть увеличен используя вектора напряжения статора Vk+1 или Vk+2, и уменьшен применяя нулевые вектора напряжения V 0 или V 7. Раздельное управление моментом и потокосцеплением статора может быть достигнуто, воздействием на радиальные и тангенциальные компоненты вектора напряжения статора в тех же направлениях, и таким образом можно управлять соответствующим переключением ключей инвертора. В целом, если вектор потокосцепления статора находится в k-м секторе, его амплитуда может быть увеличена при помощи переключения векторов Vk?1 (для вращения по часовой стрелке), или Vk+1 (для вращения против часовой стрелки ), и может быть уменьшена, применяя векторы напряжения Vk?2 (для вращения по часовой стрелке) или Vk+2 (для вращения против часовой стрелки ). Вышеуказанное сведено в таблицу I (таблица Takahashi)
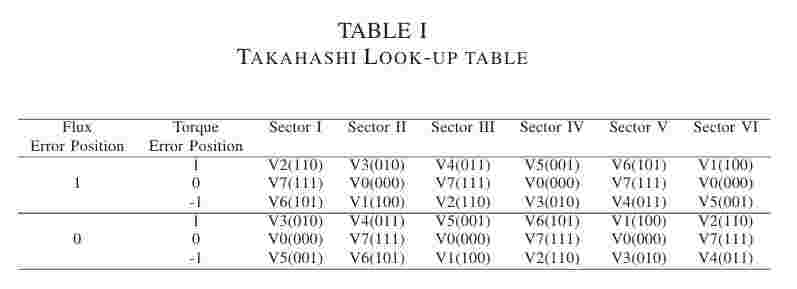
Входами к таблице являются ошибка по моменту и ошибка по потокосцеплению, для трехуровневого и двухуровневого гистерезиса соответственно. Ошибка вращающего момента равняется 1, если требуется увеличение момента, 0, если требуется уменьшение. Это для вращения против часовой стрелки:

Ошибка по потокосцеплению равна 1, если требуется увеличение и 0 , если требуется уменьшение.

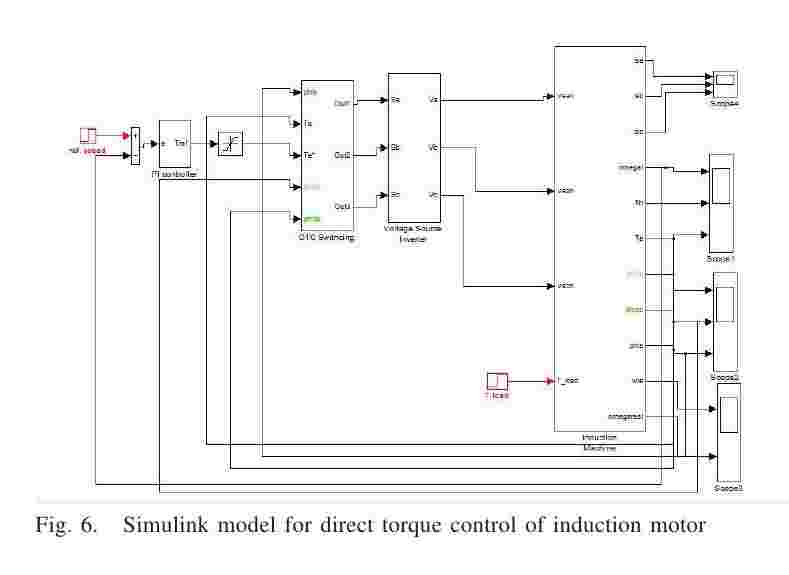
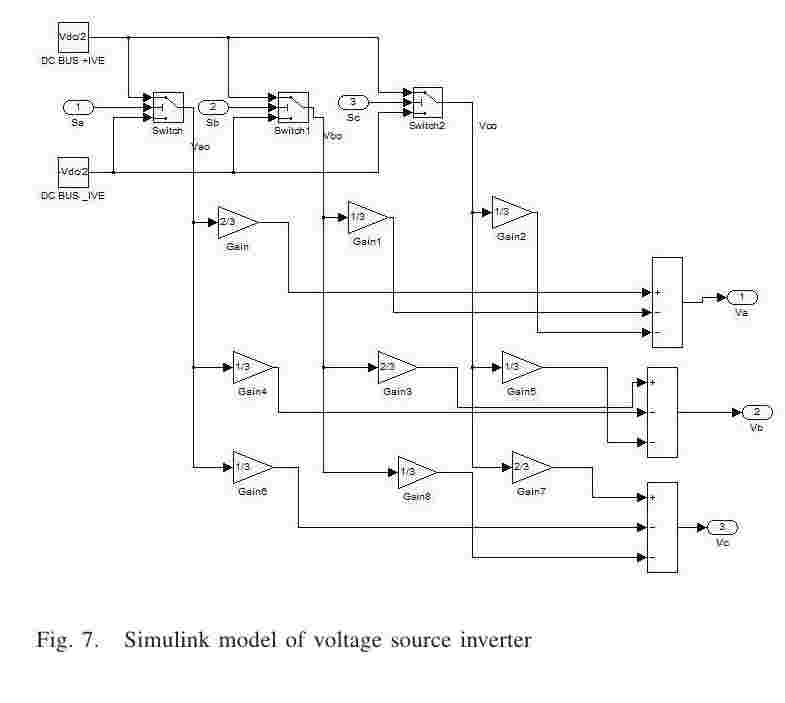
Модель системы DTC ориентированной по потокосцеплению статора в Simulink показана на рис. 6. Она состоит из четырех блоков: модель АД в неподвижных координатах, инвертор напряжения, контроллер DTC и PI-регулятор. PI-регулятор находится во внешнем контуре для точной регулировки скорости. VSI (показанный на Рис. 7) использует коммутирующие сигналы, сгенерированные контроллером DTC, чтобы управлять тремя блоками ”Switch” ,переключая между +V2dc и -V2dc. o-n блок преобразования включен в модель двигателя. Модель контроллера DTC в Simulink показана на рис. 8. Заданный момент создается PI-регулятором и заданным потокосцеплением статора, который задан в блоке ”Constant” и равен 0.5 Вб Как показано, DTC содержит два контура, соответствующие потокосцеплению статора и моменту. Заданные значения потокосцепления статора и момента сравниваются с фактическими значениями, и затем выдают ошибки, которые подаются на двух уровневый и трех уровневый гистерезисные регуляторы соответственно. Они могут быть реализованы с Simulink с помощью блоков ”Relay”. Выходы реле вместе с положением потокосцеплением статора используются в качестве входов в таблице Takahasi. Таблица может быть реализована функцией ”Embedded MATLAB Function" Этот блок использует ” If” и” If-else” функции.
IV. Результаты моделирования
Подробное сравнение между этими двумя методами было выполнено с помощью численного моделирования.
Негативными эффектами, связанными с переключением ключей пренебрегли. Таким образом, можно провести сравнение этих двух схем в установившемся состоянии и переходном.
Результаты моделирования FOC
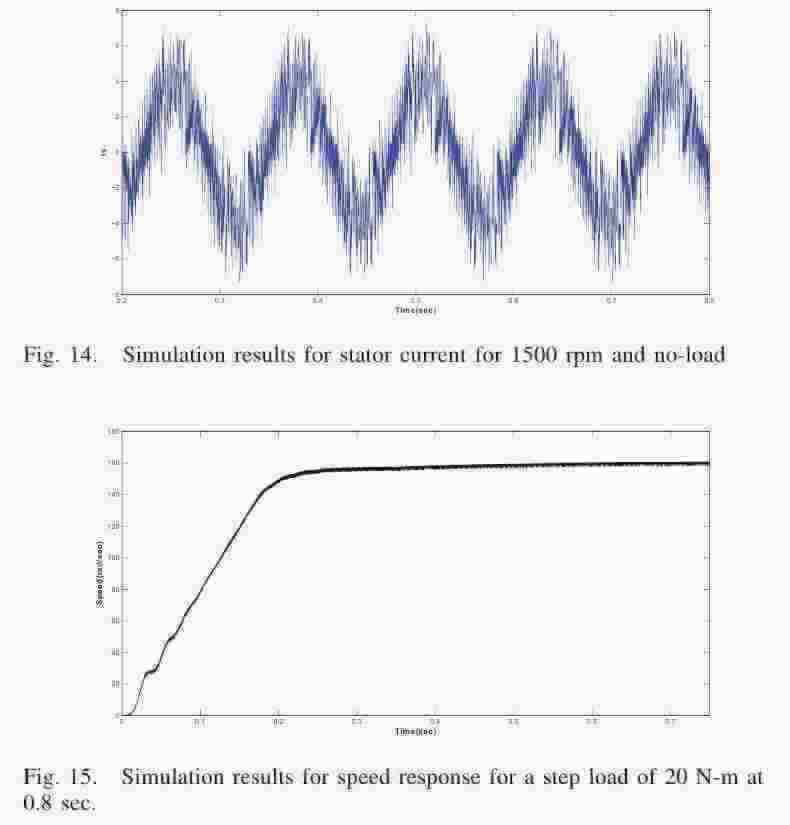
Рис 9. и 10. показывает результаты моделирования для токов статора; Увеличенное представление установившихся токов статора; реакция момента и реакция скорости соответственно без нагрузки. Заданная скорость равна 1500 об/мин. Как видно, двигателю требуется 0.05 секунды, чтобы достигнуть заданной скорости. Рис. 11 показывает реакцию момента для непрямого векторного управления при нагрузке прилагаемой скачком. Заданная скорость равна 1500 об/мин и нагрузка в 20 N-m набрасывается в 0.8 секунды.
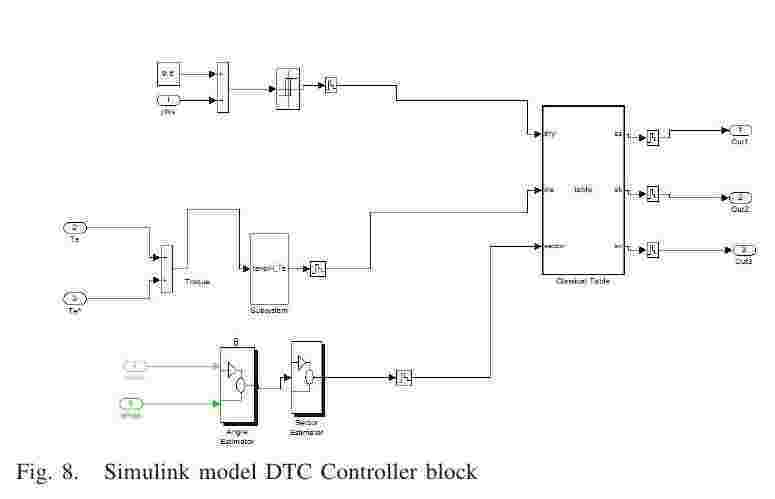
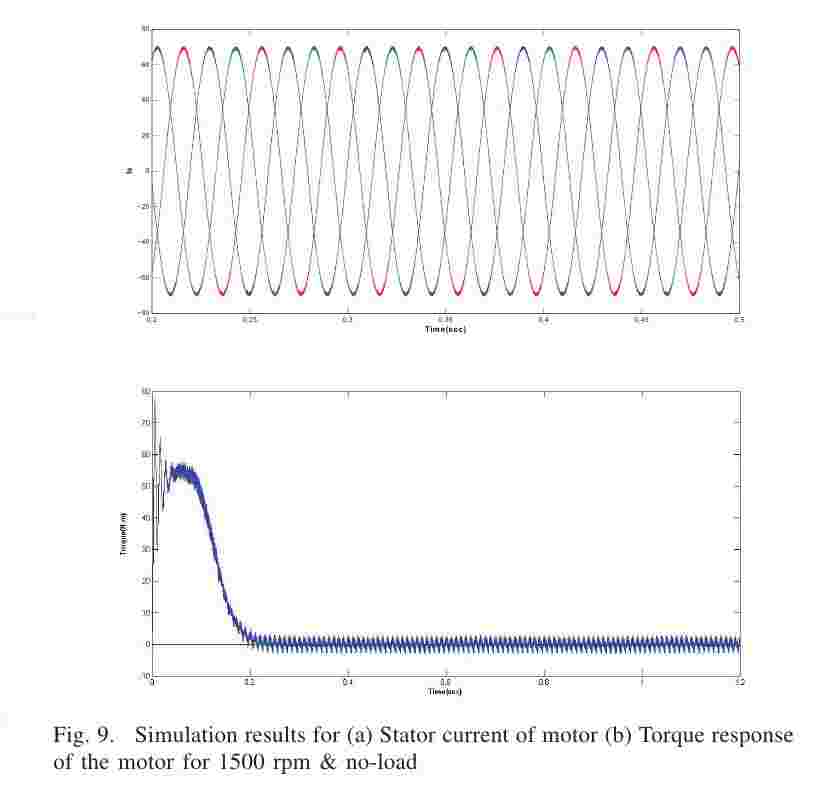
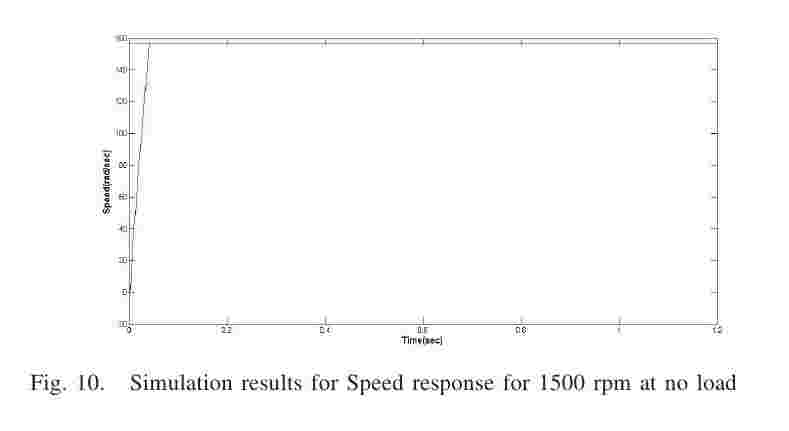
Рис. 12 показывает результаты моделирования для FOC при заданной скорости 1500 об/мин. Двигатель нагружается моментом 20 N-m в 0.8 секунды.
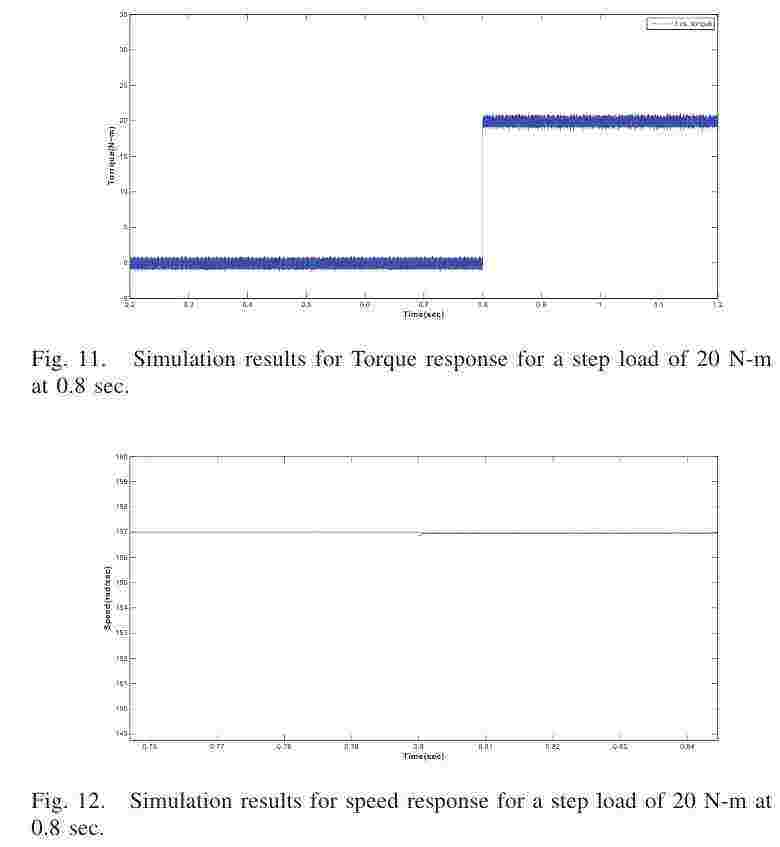
При такой нагрузке
скорость немного уменьшается и восстанавливается назад к исходному значению. Как видно, FOC требуется приблизительно 0.2 секунды, чтобы восстановить исходную скорость.
Результаты моделирования DTC
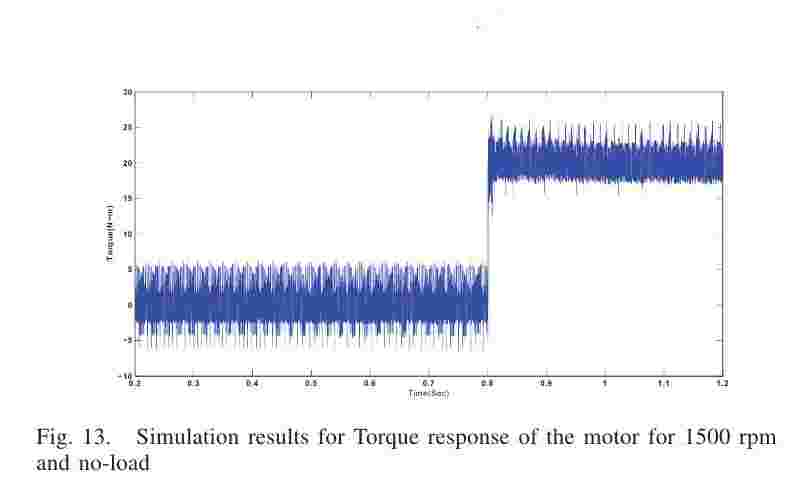
Рис. 13 показывает результаты моделирования DTC для заданной скорости 1500 об/мин. Двигатель работает без нагрузки. Как видно, для классического DTC, пульсация в переходном и установившемся состояния высока. Рис. 14 показывает ток статора полученный при моделировании.
Вывод
В работе рассмотрены основные характеристики FOC и DTC путем моделирования, а также выделены преимущества и недостатки каждого из подходов. ясно видно, что сложность реализация FOC выше чем DTC
Другая цель работы состоит в том, чтобы представить непредвзятое сравнение методов FOC и DTC, чтобы позволить пользователям выбрать более подходящее решение для любой задачи, которая требует регулирования момента. Было проведено моделирование в устойчивом состоянии и переходных режимах. В заключении можно сказать, что в целом производительность этих двух схем сопоставима. DTC предпочтителен для задач с высокой динамикой, но с другой стороны он имеет проблемы с более высоким током и пульсациями момента.
Литература
[1] Bimal K. Bose, Modern Power Electronics and AC Drives, Third
impression, INDIA: Pearson Education, Inc., 2007.
[2] B.K.Bose (Editor), Power Electronics and Variable Frequency Drives,
New York;IEEE Press:1996
[3] Blaschke F, ”The Principle of Field-Orientation as applied to the New
Transvector Closed-Loop Control System for Rotating-Field Machines,”
Siemens Review, Vol. 34, pp. 217-220, May 1972.
[4] Depenbrock M, ”Direct Self Control (DSC) of Inverter-Fed Induction
Machine,” IEEE Trans. Power Electronics, Vol. 3, No. 4, pp. 420-429,
Oct, 1988
[5] Fatiha Zidani, Rachid Nait said, ”Direct Torque Control of Induction
Motor with Fuzzy Minimization Torque Ripple,” Journal of Electrical
Engineering, Vol. 56, No. 7-8, pp. 183-188, 2005.
[6] Isao Takahashi, and Ohmori Youichi, ”High-Performance Direct Torque
Control of an Induction Motor,” IEEE Trans. Industry Applications, Vol.
25, No. 2, 257-264, Mar/Apr., 1989.
[7] Isao Takahashi, and Toshihiko Noguchi, ”A New Quick-Response and
High Ef?ciency Control Strategy of an Induction Motor,” IEEE Trans.
Industry Applications, Vol. IA-22, No. 5, pp. 820-827, Sep/Oct., 1986.
[8] Kazmierkowski M P, and Giuseppe Buja, ”Review of Direct Torque
Control Methods for Voltage Source Inverter-Fed Induction Motors,”
Conf. Rec. IEEE-IAS, pp. 981-991, 2003.
[9] Malik E. Elbuluk, ”Torque Ripple Minimization in Direct Torque
Control of Induction Machines,” IEEE-IAS annual meeting, Vol. 1, pp.
12-16, oct 2003.
[10] Marino P, M. D lncecco, and N. Visciano, ”A Comparison of Direct
Torque Control Methodologies for Induction Motor,” IEEE Porto Power
Tech Conference PPT’01, PORTO, PORTUGAL, Sep., 2001.
[11] Telford D., Dunnigan M. W., and Williams B. W., ”A Comparison of
Vector Control and Direct Torque Control of an Induction Machine,” in
Conf. Proc., IEEE PESC’00, 2000, vol. 1, pp. 421-426.
[12] Hoang Le-Huy., ” Comparison of Field Oriented and Direct Torque Con-
trol for Induction Motor Drives,” in Conf. Proc of Industry Applications
, 1999, vol. 2, pp. 1245-1252
[13] K.Hasse, ” Zur Dynamik drehzahlgeregelter antriebe mit stromrichter-
mespeisten asynchronykurzschlublaufermachinen,” Dramstadt, Techn.
Hochsch Diss., 1969
[14] Bimal K Bose, ” High performance control & Estimation in AC Drives,”
in conf. Rec.IEEE IECON’97,1997, pp.377-385.