CONTROL OF COMPLIANT ELECTROMECHANICAL ROBOTS WITH COMPLEX KINEMATIC AND OSCILLATORY OCCURRENCES IN JOINTS
Автор: I.A. Sniegina, V.N. Khomenko, A.A. Melnyk
Источник: Материалы VI Международной научно-практической конференции Донбасс-2020: перспективы развития глазами молодых ученых.
Introduction
I.A. Sniegina, V.N. Khomenko, A.A. Melnyk CONTROL OF COMPLIANT ELECTROMECHANICAL ROBOTS WITH COMPLEXE KINEMATICS and OSCILLATORY OCCURRENCES IN JOINTS
This article describes links internal dynamics of elastic robots with complex kinematics. Taking into account internal elasticity of joints is important. It influence on the interaction quality of a robot with its environment, especially when interacting with human. The one can sense this phenomena when a classical PID regulation approach is employed. In the considered type of robots elasticity arises mainly from the robot Harmonic Drive reducer. We show this effect in simulations. A special, biologically inspired approach is needed to control interaction with a human in a natural, more perceptive way. Thus, we investigate to employ Rowat-Selverston neural oscillator to control vibration phenomena in joints of an interacting robot.
Development of robotic technologies is on a high level nowdays. Robots are used in industrial plants, replacing persons completely or partially. They execute technical operations of different complexity. Next, they help people in house holding too. Notably robots interact more and more with peoples. The study of interaction process between human and robot does not limited only with technical aspects but fundamentals biologics paradigms are also applied [1].
This paper considers control of compliant joints of a robot-manipulator. This compliance is due to the reducer with deformable dentures “Harmonic Drive”. The robot joints are initially controlled with a classical PID controller.
PID controller. A proportional–integral–derivative controller (or, simply PID) is a generic control loop feedback mechanism widely used in industrial control systems – a PID is the most commonly used feedback controller. It calculates an "error" value as the difference between a measured process variable and a desired setpoint, its derivate and integral. The controller attempts to minimize the error by adjusting the process control inputs [3].
The PID control scheme is named after its three correcting terms, whose sum constitutes the manipulated variable. The proportional, integral, and derivative terms are summed at the output of the PID controller. Defining u(t) as the controller output, the final form of the PID algorithm is:
![]()
where
Kp - proportional gain, a tuning parameter; Ki - integral gain, a tuning parameter; Kd - derivative gain, a tuning parameter; e - error = SP – PV;
t - time or instantaneous time (the present).
In this article we use a simple proportional controller to accentuate the influence of the reducer nonlinearities on the dynamics of the whole system.
Analysis of paper H. Serhan, C. G. Nasr, P. Henaff – Muscle emulation with DC motor and neural networks for biped robots[5]. Present paper show that it’s possible to model a nonlinear muscle model using a robot joint entrained with a DC motor controlled by a PID controller . The DC motor and PID are couples in a closed loop. The controller is tuned by Neural Network. Neural Network is a Multi-Layer-Perceptron. Tuning the PID of each of the DC-Motors implemented in articulations of the robot permit to obtain dynamic of movement equivalent to a human dynamics. The modeling implemented for the knees of a biped robot but the compliance effect of reducer does not taken into account and the robot is considered entirely rigid.
But the proposed by P. Henaff et al. [5] approach open dors to a world of biologically insipid control of robots. This is a new field on robotic control and shoud be studied in more details.
Bioinspiration. The past years science and technology developed under profound influence of the computer technology. Failures because of these technologies usage enforce to recover fundamentals of biologics paradigms. More exactly, biological approach permits to achieve «naturals» interaction of robots with humans and their environment.
Particularly it is important by physique interaction of robot with a human.
One of the vertebrate locomotion model is based on the concept of self-organized generators – Central Pattern Generators (CPG). This one can found in articles Bassler, 1993 ; Kollins, Ritchmond, 1994 ; Krous, 2002 ; Viller, Miranker, 1993. There is exists a problem of creation robot, which will act similar to a human. Advantages of utilizing CPG in robotics can be found in works of Ijspeert, 2008, Batchli, 2006, Matsuoka, 1995[2].
Oscillator of Rowat-Selverston. is a biologically inspired oscillator. First, biologically similar oscillators can "adjust" for the natural frequencies of mechanically compliant robot joints. Second, they adapt to the frequency of a person who communicates with the robot.
Biological neurons with several canals have complicated structure that creates difficulties in their modeling. American scientists Rowat and Selverston have presented (in 1997) an approximated model of such neuron. They took into account two groups of currents (“slow” and “fast”) and proposed two first order differential equations connecting currents and tensions. The fast current is described by equation (1) and the slow – by equation (2):
where ![]() ,
, ![]() - neuron membrane time constant;
- neuron membrane time constant; ![]() - time constant of a slow activation of currents;
- time constant of a slow activation of currents; ![]() - injected current; U - membrane tension; q - slow current; U and q - variables; F( U, σf) - nonlinear voltage-current characteristic of the fast current [5].
- injected current; U - membrane tension; q - slow current; U and q - variables; F( U, σf) - nonlinear voltage-current characteristic of the fast current [5].
Christian Ott, Alin Albu-Schaffer, Andreas Kugi – A passivity based cartesian impedance controller for flexible joint robots [6]. In this paper it has been exhibit that the feedback of joint torques for a flexible joint robot can be presented physically as a scaling of a motor inertia. This allows the combination of a torque feedback action with any controller designed for flexible joint robots. Christian Ott treated in detail the case of a Cartesian impedance controller.
Christian Ott is the most famous scientist working on problems of interaction between the robot and the environment. In his works he took into account elastic comportment of the robot joints.
It may be noted that he did not published works on the interaction of a «handshake» type with a human.
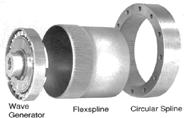
Mathematical model of a Harmonic Drive reducer. Reducer is a principal matter of mechanical compliance in joints of humanoids robots having rigid structure. Particularly this is a Harmonic Drive reducer (fig. 1). It consists of three parts. There are: wave generator, flexspline and circular spline. The elasticity arises in flexspline.
Harmonic Drive can exhibit much more complex dynamic behavior than gear transmissions without flexispline (epicyclic or worm-and-wheel gearbox) [7] but it has a zero backlash.

The reducer exhibits also significant friction in flexispline and in bearing. The equation of friction [7]:
![]()
where
![]()
Tfm - friction torque; Tvn - viscous torque for negative direction of angular velocity; Tvp - viscous torque for positive direction of angular velocity; Tsn - Coulomb friction negative direction of angular velocity; Tsp - Coulomb friction positive direction of angular velocity; u-1(x) - special function [7].
The compliance model it presented by the next equation [7]:
where Tmeas- measurable torque of motor; Δθ - flexspline relative torsion.
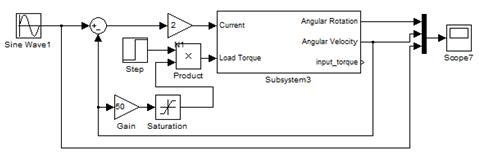
Simulation procedure. Modeling is executed in the Simulink MATLAB eviroment. The model containing joint driving motor (fig. 2a) and a Harmonic Drive reducer
(fig. 2b) was created. The load of a joint was modeled as a constant reactive opposite torque.
 a)
a)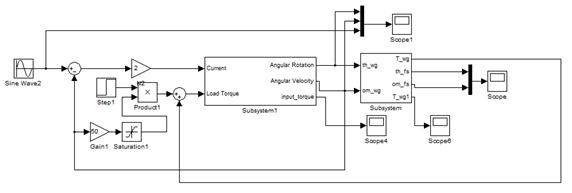 b)
b) Figure 2 – Simulation of a motor (a) and full system with Harmonic Drive reducer and proportional regulator (b)
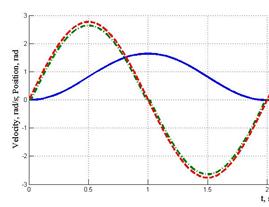
Analysis of simulation results. The real angular velocity differs from the desired velocity, because there is a load, which gives a static error (the curve shape of angular velocity and angular position are slightly different one from another (fig. 3, a) as a proportional regulator is used. The effect becomes more important when the model of Harmonic Drive reducer is added. The considered regulator does not able to overcome the effect of nonlinearities of the reducer (fig. 3, b).
 b)
b) 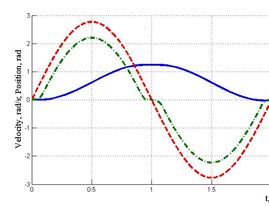
Figure 3 – Simulation results: a) motor; b) motor-HD.
As one can see on the figure 3b, the static error becames much more important because of compliant behavior and Coulomb friction in the HD reducer. Also, stiction influences at low speed. The total positioning error exceeds 10%. The problem should be solved with more sophisticated regulators.
Resume
This article describes links internal dynamics of elastic robots with complex kinematics. Taking into account internal elasticity of joints is important. It influence on the interaction quality of a robot with its environment, especially when interacting with human. The one can sense this phenomena when a classical PID regulation approach is employed. In the considered type of robots elasticity arises mainly from the robot Harmonic Drive reducer. We show this effect in simulations. A special, biologically inspired approach is needed to control interaction with a human in a natural, more perceptive way. Thus, we investigate to employ Rowat-Selverston neural oscillator to control vibration phenomena in joints of an interacting robot.
Bibliography
1. E. Gelenbe. Biologically inspired operations research // European Journal of Operational Research 108 (1998) 239 – 240.
2. T. Zielinska. Biological inspiration used for robots motion synthesis // Journal of Physiology – Paris, 103 (2009) 133 – 140.
3. http://en.wikipedia.org/wiki/PID_controller.
4. H. Serhan, C. G. Nasr, P. Henaff. Muscle emulation with DC motor and neural
networks for biped robots // International Journal of Neural Systems. – 12 c.
5. E. Snegina, A. Pougatch,V. Khomenko, A. Melnyk, P. Henaff, V. Borysenko. Practical aspects of Rowat-Selverston bio-inspired oscillator simulation // Наукові праці Донецького національного технічного університету 11 (186), 2011. – 369 - 373.
6. C. Ott, A. Albu-Schaffer, A. Kugi, S. Stramigioli, G. Hirzinger. A passivity based cartesian impedance controller for flexible joint robots – Part 1: Torque feedback and gravity compensation. – 7 c.
7. H.D. Taghirad, P.R. Bélanger. Modeling and parameter identification of Harmonic Drive systems // Journal of Dynamic Systems, Measurements, and Control. – 22 c.