Аннотация
Буряк А.Д., Исследование процессов и обоснование системы автоматизированного электропривода шахтного электровоза на основе использования вентильного двигателя. В работе рассказывается о применении вентельных двигателей в шахтных локомотивах.
Проблема и ее связь с научными и практическими задачами.
Основной вид внутришахтного транспорта - электровозный. Он обеспечивает около 70% грузоперевозок горной массы, продолжает оставаться доминирующим [1]. Однако, не претерпев серьезных технических усовершенствований, электровозный транспорт имеет низкие показатели практически по всем технологическим и эксплуатационным параметрам. Увеличение единичных мощностей и модернизация формы кузова, конструкции тяговых двигателей и т.п. позволили улучшить показатели использования рудничных электровозов, но в небольшой степени.
Анализ исследований и публикаций.
По сравнению с приводами большинства горных машин и механизмов рабочий режим тягового привода характеризуется рядом отличительных особенностей, сущность которых следует из анализа диаграммы движения электровоза (рис. 1).
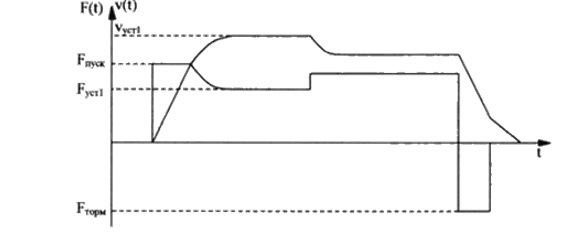
Рисунок 1 - Диаграмма движения электровоза
Приводу шахтного локомотива свойственны частые перегрузки, имеющие место в режимах пуска (Fпуск) и торможения (Fторм). Переменный вес состава, непостоянный коэффициент сцепления и уклон путей также обусловливают значительное колебание сил сопротивления движению, а, следовательно, и мощности, потребляемой приводом. При этом с целью ограничения ее величины необходимо обеспечивать соответствующее снижение частоты вращения тягового двигателя.
Таким образом, основным требованием к тяговому приводу является его устойчивая работа во всем диапазоне варьирования тяговых усилий при условии ограничения потребляемой мощности величиной энергоемкости аккумуляторной батареи или тяговой сети. Указанные обстоятельства определяют форму тяговой характеристики шахтного аккумуляторного электровоза (рис. 2).
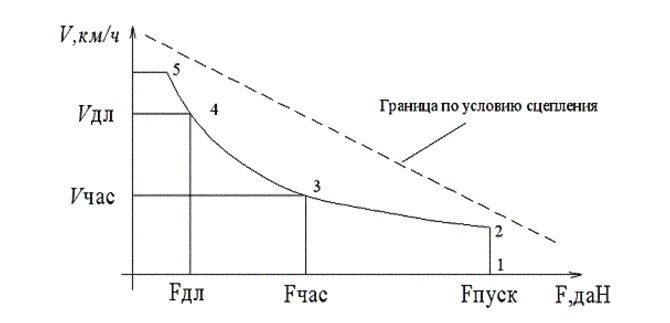
Рисунок 2 - Тяговая диаграмма электровоза
В общем случае она состоит из двух зон регулирования: режима пуска и разгона электровоза.
При пуске (участок 1-2 на рис.2) должна обеспечиваться постоянная сила тяги, значение которой определяется ограничением по сцеплению между колесами и рельсами. Тяговый двигатель при пуске должен развивать момент, превышающий его номинальное значение в 1,5-2 раза [2]. По мере увеличения скорости мощность, потребляемая тяговым двигателем, возрастает. Скорость в конце режима пуска (точка 2 на рис. 2) определяется допустимой длительной мощностью источника питания.
Вторая зона регулирования (участок 2-5 на рис. 2) соответствует повышенной скорости движения после достижения максимальной мощности. Данный участок тяговой диаграммы характеризуется наличием двух точек, соответствующих основным режимам работы привода локомотива. Первый из них, длительный (4), соответствует движению разгруженного электровоза и характеризуется повышенной скоростью (Vдл) при малой величине тягового усилия (Fдл). Второй, часовой (3), режим используется при транспортировании состава с номинальным весом. При этом электровоз работает на малой скорости (Vч), развивая требуемое повышенное тяговое усилие (Fч). По величине потребляемой мощности длительный и часовой режимы могут быть классифицированы, соответственно, как продолжительный с переменной нагрузкой (S6) и кратко временный (S2). Таким образом, в соответствии с тяговой характеристикой мощность, потребляемая приводом, не остается постоянной, а в некоторой степени возрастает с увеличением усилия сопротивления движению поезда. Этим обеспечивается максимальное использование мощности двигателя при пуске, а также в наиболее производительном, часовом, режиме работы.
Задача регулирования механических параметров тягового привода наиболее просто решается посредством применения в качестве приводного двигателя постоянного тока последовательного возбуждения (ДПТ). Основными преимуществами этой машины по сравнению с остальными двигателями являются простота реализации процесса регулирования скорости, возможность непосредственного подключения к автономному источнику электропитания (аккумуляторной батарее).
Широкое применение ДПТ в рудничном тяговом приводе обусловлено простотой регулирования частоты вращения. На практике это реализуется посредством амплитудного (реостатные системы) или импульсного (тиристорные системы) управления напряжением якорной обмотки.
Построение автоматизированного электропривода на основе ВД
Эффективным решением задачи разработки альтернативного тягового привода, лишенного недостатков привода постоянного тока является применение для этой цели бесколлекторного двигателя переменного тока, в качестве которого может быть использован вентильный двигатель (ВД) с возбуждением от высокоэнергетических постоянных магнитов на роторе, выпуск которых освоен ведущими электротехническими компаниями.
ВД обладают целым рядом конструктивных и техникоэксплуатационных преимуществ, по отношению к существующим типам электрических машин: отсутствие узлов, требующих техобслуживания - бесколлекторная машина; обеспечение взрывобезопасности; большая перегрузочная способность по моменту, что обеспечивает возможность применения в тяговом приводе; высокое быстродействие, возможность оптимизации режимов работы по скорости и нагрузке; наивысшие энергетические показатели; высокая надежность и повышенный ресурс работы; низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками. Таким образом, преимущества ВД с электронными системами управления объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока, а часто и превосходят их.
Для управления характеристиками вентильного двигателя наиболее целесообразно использовать микропроцессорную систему управления (МСУ).
На рисунке 3 представлена предлагаемая структурная схема привода.
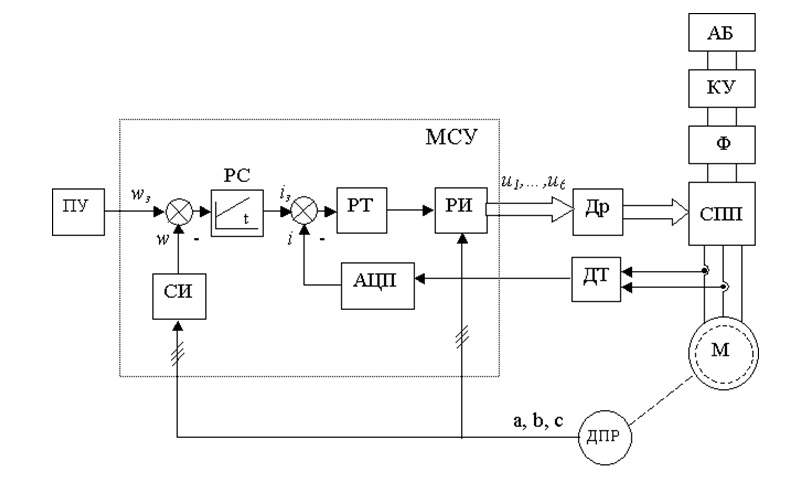
Рисунок 5 - Структурная схема привода
Питание двигателя осуществляется от аккумуляторной батареи (АБ), через коммутирующее устройство (КУ), фильтр (Ф) и силовой полупроводниковый преобразователь (СПП). В качестве элементов СПП целесообразно использовать силовой IGBT модуль транзисторов с полной управляемостью. Сигнал от ДПР поступает на счетчик импульсов (СИ), который производит их подсчет для определения текущей скорости. Для программного управления ВД необходима цифровая обработка аналоговых сигналов (от датчика тока) и дискретных (угловое положение ротора и скорость) входных сигналов и сигналов обратных связей. Регулирование тока двигателя осуществляется с помощью широтно-импульсного регулирования напряжения, подводимого к статору.
Выводы и направление дальнейших исследований.
Таким образом, одним из направлений совершенствования привода является отказ от использования ДПТ и нерациональных схем управления электроприводом. Одним из решений проблемы может быть применение в качестве приводных вентильных двигателей. Будучи оснащенными силовым инвертором и системой управления с использованием микроконтроллера, такие электродвигатели в принципе позволили бы решить задачу совершенствования электропривода шахтного электровоза.
Построеннаматеиматическая модель электропривода на основе вентильного двигателя. Она может быть использована для исследования динамических процессов в вентильном электроприводе с ШИР, для выбора и уточнения параметров регуляторов, выбора оптимальной частоты ШИР, исследования энергетических характеристик электропривода и двигателя в частности.
Список источников
1. Синчук О.Н., Беридзе Т.М., Гузов Э.С. Системы управления рудничным электровозным транспортом, - М.: Недра, 1993. - 255 с.
2. Алексеев Н.И. Оптимизация систем электрической тяги в подземных выработках. - М.: Недра, 1979. - 252 с.
3. Дьяконов В., Круглов В. MATLAB. Анализ, идентификация и моделирование систем. Специальный справочник. - СПб.: Питер, 2002. - 448 с.: ил.
4. Ильинский Н.Ф., Козаченко В.Ф. Общий курс электропривода: Учебник для вузов, - М.: Энергоатомиздат, 1992 - 544 с.