Аннотация
В.П.Кондрахин, докт. техн. наук, проф., (Донецкий национальный технический университет), В.В.Косарев, канд. техн. наук, директор, Н.И.Стадник, докт. техн. наук, первый зам. директора, А.В. Мезников, зав. отделом (Донгипроуглемаш), Устойчивый момент и диапазон частотного регулирования двухдвигательного привода механизма перемещения очистного комбайна. В статье рассказывается об изменении диапазона частотно-регулируемого привода двухдвижетельного механизма перемещения.
Проблема и ее связь с научными и практическими задачами.
Нагрузки в частотно-регулируемом приводе двухдвижительных механизмов перемещения очистного комбайна с жестким тяговым органом носят динамический характер, обусловленный, во-первых, неравномерностью сил сопротивления движения машины (силы на исполнительных органах и силы трения в опорах), и, во-вторых, несовершенством зацепления звезд с рейкой. В соответствии с этим можно условно выделить две составляющие нагрузок в приводах. Колебания, соответствующие первой составляющей, происходят в приводах обоих звезд синфазно. Для другой составляющей характерно наличие как синфазных, так и несинфазных колебаний, период которых равен продолжительности зацепления одного зуба звезды. Амплитуды этих колебаний зависят от величины сдвига фазы между началом зацепления зубьев приводных звезд с цевочной рейкой, средней скорости перемещения и номинального скольжения электродвигателей. Для второй составляющей характерны также низкочастотные колебания, период которых равен времени перемещения комбайна на расстояние, равное длине секции рейки [1,2]. Для приводов, имеющих такой динамический характер нагружения, важную роль при выборе параметров привода, исходных данных для расчета на прочность и режима работы играет величина устойчивого момента, под которым понимается максимальное значение среднего уровня вращающего момента электродвигателя, при котором он при стационарных режимах нагружения может работать устойчиво, без опрокидываний.
Анализ исследований и публикаций.
В работе [3] предложены выражения для определения устойчивого момента привода исполнительных органов очистного комбайна с учетом случайного характера действующих нагрузок. В работе [4] получены аналогичные выражения для двухдвигательного привода исполнительных органов очистного комбайна, учитывающие разброс механических характеристик двигателей и его динамические свойства.
Однако для оценки устойчивого момента двухдвигательного частотно-регулируемого привода механизма перемещения полученные результаты могут быть использованы только после проведения дополнительных исследований. Это связано с особенностями формирования колебаний нагрузки в механизмах перемещения и их низкочастотным характером. Кроме того, для привода механизма перемещения важную роль играет вопрос диапазона частотного регулирования скорости, который непосредственно связан с величиной устойчивого момента привода.
Постановка задачи.
В работе поставлена и решена задача количественной оценки устойчивого момента и диапазона частотного регулирования двухдвигательных приводов механизма перемещения очистного комбайна с целью обоснованного выбора их параметров.
Изложение материала и результаты.
В качестве объектов исследований приняты механизмы перемещения очистных комбайнов для выемки тонких пластов УКД300 и УКД400. Для таких машин вследствие жестких габаритных ограничений вопросы выбора рациональных параметров привода особенно важны. Основные параметры механизмов перемещения комбайнов УКД300 и УКД400 приведены в табл. 1.
Анализ результатов измерений нагрузок в двухдвигательных приводах подачи очистных комбайнов УКД300 и УКД400 показывает, что нагрузки (токи двигателей и моменты) имеют случайные колебательные составляющие. Верхняя граница частоты колебаний увеличивается пропорционально средней скорости перемещения и не превышает 1,6 Гц.
На рисунке 1 представлена осциллограмма крутящих моментов левого и правого электродвигателей привода подачи комбайна УКД300, полученная в ходе стендовых испытаний на полноразмерном стенде ЗАО "Горловский машиностроитель".
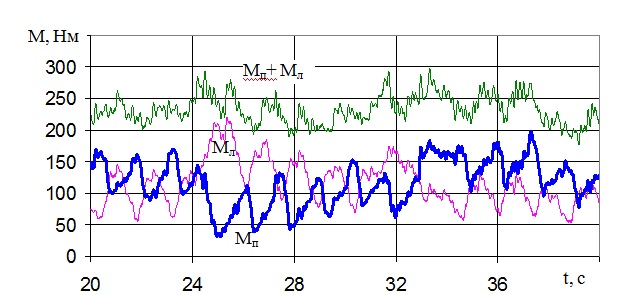
Рисунок 1 - Осциллограмма крутящих моментов левого Мл и правого Мп электродвигателей и суммарного момента привода подачи комбайна УКД300 при движении со скоростью 4,2 м/мин.
Необходимо отметить, что в условиях стенда силы резания и подачи на исполнительных органах имитировались примерно постоянными, статическими сопротивлениями.
Как видно на рис.1, в приводах механизма перемещения комбайна УКД300 формируются существенные несинфазные колебания нагрузки. Период высокочастотных составляющих равен продолжительности зацепления зуба звезды с рейкой, а низкочастотной составляющей - времени перемещения комбайном на расстояние, равное длине 1 рештака (1,5 м). Природа этих колебаний объяснена в работах [1,2]. Так как расстояние между осями звезд комбайна УКД300 достаточно большое (2,160 м), и между секциями рейки имеются зазоры, то зубья звезд входят в зацепление с рейкой не синхронно, что объясняет наличие несинфазных колебаний нагрузки с периодом, равным продолжительности зацепления зуба (примерно 1,5 с на рис.1).
На рисунке 2 представлена осциллограмма токов левого и правого электродвигателей привода подачи комбайна УКД400, полученная в ходе измерений, проведенных в АП "Шахта "Красный партизан" ГП "Свердловантрацит". Осциллограмма записана при выемке комбайном угля со скоростью перемещения 5 м/мин при угле падения пласта 0°. Здесь же приведена кривая суммарного тока обоих двигателей.
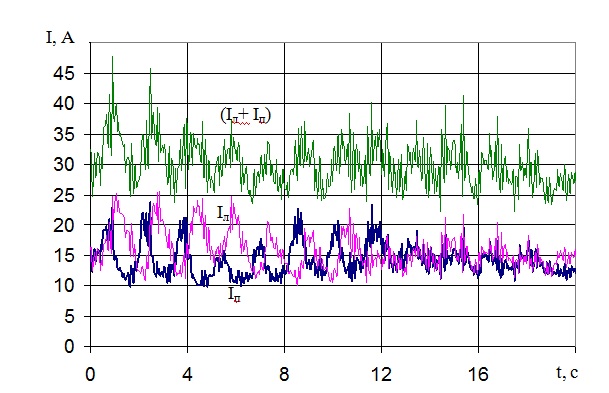
Рисунок 2 - Осциллограмма токов левого и правого электродвигателей и суммарного тока привода подачи комбайна УКД400 при выемке со скоростью VП=5м/мин.
Особенность формирования нагрузки привода механизма перемещения комбайна УКД400 заключается в том, что часть времени (а именно 5/12 общего времени работы, что соответствует зацеплению звезды с пятью зубьями из 12, расположенных на одной секции рейки) обе звезды входят в зацепление с зубьями одной рейки. Остальное время звезды зацепляются с зубьями соседних реек.
В случае, когда звездочки зацепляются с зубьями разных реек, из-за зазора между рейками моменты начала зацепления зубьев не совпадают по времени, возникает сдвиг фазы между началом зацепления зубьев, что приводит к возникновению несинфазных колебаний нагрузки в приводах со значительной амплитудой. Указанные режимы формирования нагрузок соответствуют участку 0-12 с на осциллограмме рис. 2.
Так как расстояние между осями звездочек принято равным кратным шагу зубьев рейки (кратность 7), при одинаковой степени износа зацепление зубьев обеих звездочек с зубьями одной рейки происходит синхронно. При этом колебания нагрузки в обоих приводах происходят синфазно и имеют сравнительно малую амплитуду (см. участок 12-20с на рис. 2).
Поскольку оба привода механизма перемещения работают на общий тяговый орган, то опрокидывание (остановка под нагрузкой) электродвигателей будет происходить совместно, несмотря на различие мгновенных значений моментов обоих двигателей в установившемся режиме. На рис. 3 приведен фрагмент осциллограммы токов при опрокидывании электродвигателей механизма перемещения комбайна УКД400.
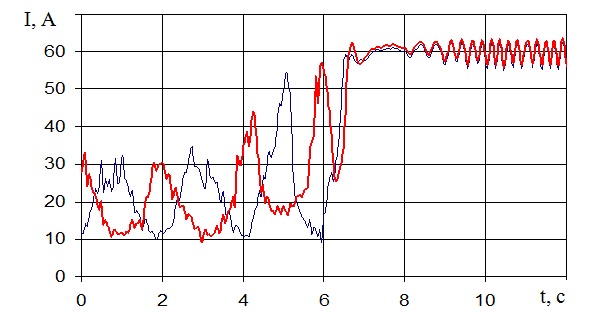
Рисунок 3.- Осциллограмма токов при опрокидывании электродвигателей механизма перемещения комбайна УКД400.
Как видно из рис. 3, колебания токов электродвигателей происходят в противофазе вокруг среднего уровня, близкого к номинальному току 24,5 А до тех пор, пока их значения не приближаются к критическому значению. После этого рост токов обоих двигателей происходит практически синхронно. Отсюда следует, что для оценки устойчивого момента двухдвигательного привода механизма перемещения следует учитывать неравномерность суммарного момента нагрузки.
Из рисунков 1 и 2 следует, что процесс изменения суммарной нагрузки привода перемещения очистного комбайна может рассматриваться как случайный. В работе [3] предлагается для оценки устойчивого момента в качестве параметра, характеризующего разброс значений случайного процесса относительно среднего, принимать коэффициент вариации нагрузки. Для статистической обработки были приняты участки осциллограмм с примерно постоянным уровнем средней нагрузки и постоянной скоростью перемещения. Наименьшая длина реализации принималась такой, чтобы путь, пройденный комбайном, примерно соответствовал длине одного рештака конвейера (1,5 м). Выбранная длина реализации случайного процесса позволяет учесть особенности формирования нагрузок с точки зрения их амплитуд и коэффициента вариации.
Результаты статистической обработки результатов измерения нагрузки приведены в таблицах 2 и 3. В таблицах приняты обозначения МО - математическое ожидание, КВ - коэффициент вариации. Ток и момент в рабочем диапазоне токов от 15 до 40 А ( при номинальном токе 24,5 А) в первом приближении связаны прямо пропорциональной зависимостью, коэффициент пропорциональности для электродвигателя ЭКВ4-30-6-02 примерно равен 12 Нм/А. В таблицах в скобках даны расчетные значения тока (табл.2) и момента двигателя (табл.3).
В механизмах перемещения очистных комбайнов обычно принимается разомкнутая система управления по закону частотного регулирования U1/f1=const (или ? = ?) при регулировании вниз от номинальной частоты (? < 1). При ? > 1 принимается закон регулирования U1 = const. Эффективное применение более сложных замкнутых систем управления (как скалярных, так и векторных) существенно затрудняется тем, что привод механизма перемещения является двухдвигательным, причем питание обоих двигателей осуществляется от одного преобразователя частоты. Такая структура привода обусловлена жесткими требованиями по его габаритным размерам, особенно по высоте.
Нагрузка и частота вращения двигателей в произвольный момент времени могут существенно различаться между собой (см. рис. 1 и 2), что делает неэффективным управление с обратной связью по току или частоте вращения одного из двигателей. Применение двух частотных преобразователей в случае их размещения на штреке требует наличия отдельного кабеля для каждого двигателя, что вряд ли технически реализуемо. Установка двух бортовых преобразователей из-за жестких габаритных ограничений возможна, по-видимому, только на комбайнах, предназначенных для выемки пластов большой мощности. Поэтому в большинстве случаев для механизмов перемещения очистных комбайнов целесообразно использование разомкнутых систем частотного управления.
Для построения зависимости Мкд(a) для указанного выше двухзонного управления в выражении (2) следует принимать y = a при a < 1 и y = 1 при a > 1. На рис. 4 приведены графики зависимостей Мк(?) и Му(?) для параметров привода с двумя электродвигателями ЭКВ4-30-6-02 при Vс=0,13.
На рис. 4 значками ? показаны точки, полученные при экспериментальных исследованиях привода механизма перемещения комбайна УКД300 на нагрузочном стенде при стационарном нагружении. Эти точки хорошо соответствуют кривой Мк(?), что подтверждает возможность использования выражения (2) для оценки критического момента электродвигателей механизма перемещения очистных комбайнов.
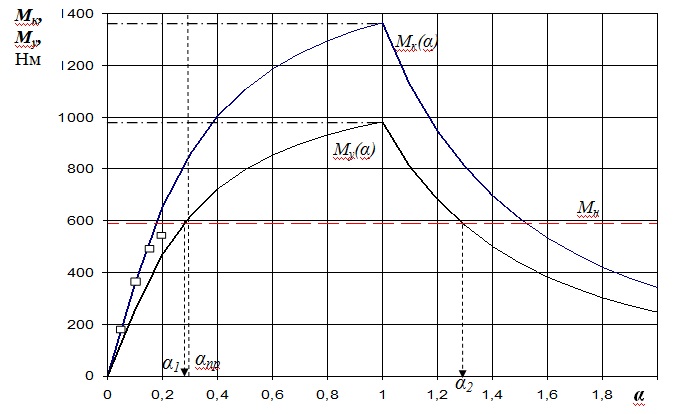
Рисунок 4.- Критический и устойчивый момент привода механизма перемещения с двумя электродвигателями ЭКВ4-30-6-02.
На рис. 4 приведено значение номинального момента Мн двухдвигательного привода (пунктирная линия), который, как известно, определяется из условия допустимого нагрева двигателя в длительном режиме при номинальной частоте питания (т.е. a = 1). При этом в первом приближении принято, что величина допустимого по нагреву момента в рассматриваемом диапазоне регулирования не зависит от частоты питания (или от ?). Для двигателей с независимым (в данном случае водяным) охлаждением при регулировании вниз от номинальной частоты это допущение сомнений не вызывает. При регулировании вверх от номинальной частоты для проверки этого допущения целесообразно проведение дополнительных исследований.
Точки пересечения кривой Му(a) с линией Мн определяют границы диапазона регулирования a1 и a2 , в котором устойчивый момент привода превышает номинальный.
В рассматриваемом случае a1=0,28, a2=1,28, то есть номинальный момент двигателя может быть реализован при частотах питания от 14 до 64 Гц. Полученные граничные значения a должны соответствовать минимальной и максимальной рабочей скорости механизма перемещения.
Выводы и направление дальнейших исследований.
Для оценки устойчивого момента двухдвигательного частотно-регулируемого привода механизма перемещения очистного комбайна следует использовать значения коэффициента вариации суммарной нагрузки двух приводов. По результатам шахтных измерений коэффициент вариации суммарной нагрузки при выемке можно принимать равным 0,116…0,130. Величина устойчивого момента привода механизма перемещения зависит от частоты питания и вида закона регулирования. При использовании закона U1/f1 = const граничные значения относительной частоты, при которых устойчивый момент привода с двумя электродвигателями ЭКВ4-30-6-02 превышает его номинальный момент, равны a1=0,28, a2=1,28, то есть номинальный момент двигателя может быть реализован при частотах питания от 14 до 64 Гц. При использовании закона регулирования (3) обеспечивается постоянство устойчивого момента привода при регулировании вниз от номинальной частоты. Однако расширить диапазон регулирования скорости в зоне низких частот таким способом невозможно из-за возрастания тока намагничивания и глубокого насыщения магнитопровода.
Список источников
1. Косарев В.В. Комплексные экспериментальные исследования механизма перемещения очистного комбайна УКД300/ В.В. Косарев, Н.И.Стадник, А.В.Сергеев, В.П.Кондрахин, Н.М.Лысенко, А.В. Косарев // Горное оборудование и электромеханика. - 2007. - №3. - с.2-6.
2. Кондрахин В.П. Моделирование нагрузок в двухдвижительном механизме перемещения очистного комбайна с частотно-регулируемым приводом / В.П.Кондрахин, Н.М.Лысенко, А.В.Косарев, В.В.Косарев, Н.И.Стадник // Наукові праці ДонНТУ, Серія: "Гірничо-електромеханічна": Зб. наук. праць. Випуск 113, - Донецьк: ДВНЗ "ДонНТУ", 2006. с.139-145.
3. Стариков Б.Я. Асинхронный электропривод очистных комбайнов / Стариков Б.Я., Азарх В.Л., Рабинович З.М. М., Недра, 1981.-288 с.
4. Бойко Н.Г. Привод исполнительных органов очистных комбайнов / Донецк, ДонНТУ, 2005.- 139с.
5. Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - 6-е изд., доп. и перераб. М.: - Энергоиздат, 1981. - 576 с., ил.