Аннотация
Шевченко О.І., Механізми переміщення очисного комбайна з частотно-регульованим електроприводом Актуальність теми пов'язана з недавньою появою технологічних розробок, наприклад, поява тиристорів і транзисторів нового покоління, тому відкрилися нові перспективи розвитку і росту вугільного виробництва шляхом технічного переоснащення підприємства, наприклад використання механізмів переміщення очисних комбайнів з частотно-регульованим електроприводом.
Вступ
Велика частка вугілля в загальному об'ємі споживаних власних енергоносіїв країни, дозволяє нам говорити що вугільна промисловість є однією з найбільш важливих галузей народного господарства України. Забезпечення необхідної і достатньої кількості високоякісного і конкурентоздатного вугілля, що видобувається, є гарантією енергетичної незалежності держави. Очисний комбайн є однією з основних машин вуглевидобувного виробництва. Від правильно обраних параметрів очисного комбайна визначається продуктивність шахти.
Широке застосування для приводу очисних комбайнів отримали асинхронні електродвигуни. Ці двигуни мають більший термін служби, менші габаритні розміри і велику безпеку в умовах шахти в порівнянні з двигунами постійного струму при тій же потужності. Асинхронні двигуни прості у виготовленні і експлуатації. Але, незважаючи на ці достоїнства, у нього є один основний недолік - це складність регулювання їх швидкості традиційними методами (зміною живлячої напруги, введенням додаткових опорів в ланцюг обмоток). Усунути цей недолік можна застосувавши частотне регулювання, теорія якого була розроблена ще в тридцяті роки. Але на практиці здійснити частотне регулювання вдалося набагато пізніше.
ОСНОВИ ЧАСТОТНОГО РЕГУЛЮВАННЯ. ВИМОГИ ДО МЕХАНІЗМІВ ПЕРЕМІЩЕННЯ ОЧИСНИХ КОМБАЙНІВ.
Суть частотного регулювання швидкості обертання асинхронних електродвигунів полягає в тому, що частота живлячої напруги на вході електродвигуна змінюється. Для зміни частоти напруги використовують спеціальні пристрої - частотні перетворювачі. Зміна частоти мережі можлива в дуже широких межах. Таким чином, частотне регулювання, вживане для асинхронних електродвигунів в електроприводах різних виробничих механізмів і систем, дає можливість не лише підвищити якість процесу, але і понизити поточні експлуатаційні витрати.
В умовах, коли потрібно високопродуктивні комбайни, підвищуються вимоги до систем переміщення з точки зору забезпечення ними високих силових і кінематичних показників. Важливе значення придбаває обґрунтований вибір електродвигуна приводу переміщення очисного комбайна.
Як показали результати експериментальних і теоретичних досліджень навантажень в частотно-регульованих приводах механізму переміщення очисних комбайнів УКД300 і УКД400, при значній нерівномірності навантаження в приводах виникає необхідність підвищення тягових характеристик комбайна, а, отже, вибору електродвигуна більшої потужності. ГП "Донгипроуглемаш" був розроблений галузевий стандарт який поширюється на очисні комбайни з однодвигуновими приводами, що переміщаються за допомогою тягового ланцюга або каната при ручному управлінні. Нині актуальною проблемою є розробка методики обґрунтованого вибору електродвигуна для високопродуктивних багаторухових очисних комбайнів. У дводвигунових механізмах переміщення очисного комбайна застосовується асинхронний двигун з короткозамкнутим ротором, який має жорстку механічну характеристику. Роботі очисних комбайнів свойственен нерівномірний характер формування навантажень в приводі механізму переміщення, що обумовлює перехідні процеси в електроприводі. Вплив цих чинників (жорсткості механічної характеристики і нерівномірності навантаження) необхідно враховувати при виборі електродвигуна приводу переміщення очисного комбайна, що забезпечує збереження запасу стійкості моменту, що крутить. Основними вимогами до механізмів переміщення очисних комбайнів : забезпечення необхідних тягових зусиль, робочих і маневрових швидкостей, плавності регулювання швидкості в усьому діапазоні.
МЕТОДИКА ВИЗНАЧЕННЯ ОСНОВНИХ ПАРАМЕТРІВ ЧАСТОТНО-РЕГУЛЬОВАНИХ МЕХАНІЗМІВ ПЕРЕМІЩЕННЯ ОЧИСНИХ КОМБАЙНІВ
У роботі [1] була представлена методика визначення основних параметрів частотно-регульованих електричних механізмів переміщення очисних комбайнів. Використовуючи цю методику були проведені ряд розрахунків, які дозволяють більше обґрунтовано підходити до проектування механізмів переміщення і вибору електроприводу, враховуючи горно-геологічні умови, в яких здійснює свою роботу очисний комбайн. Розрахунок робився для очисного комбайна УКД400, використовуючи паспортні і фактичні дані.
Визначення максимальної і мінімальної робочої швидкості переміщення комбайна
Мінімальна робоча швидкість вибирається так, щоб забезпечити роботу комбайна в найважчих умовах з повним використанням встановленої потужності приводу виконавчого органу. На рис.1 зображена залежність потужності приводу випереджаючого шнека від швидкості переміщення, яка застосовна до УКД400. Ця залежність була розрахована в роботі [2]. Виходячи з цих даних набуваємо значення Vр.min =1.4 м/хв. Це значення забезпечує роботу комбайна в найважчих умовах (лінія 1 на рис.1). Вибору максимальної робочої швидкості обмежується швидкістю переміщення машиніста, у зв'язку з цим комбайни для виїмки тонких пластів повинні мати максимальну робочу швидкість Vр.max=7 м/хв.
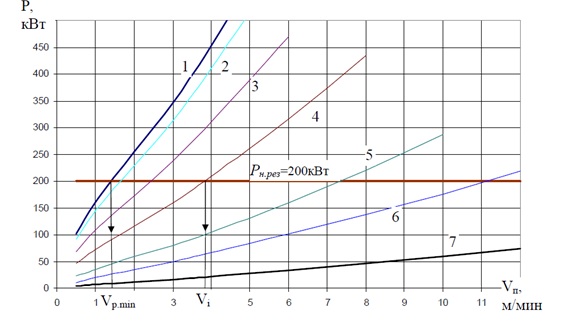
Рисунок 1. Залежність потужності приводу випереджаючого шнека від швидкості переміщення (1 - А=400Н/мм, Е=1,3, порідний прошарків;2 - А=400Н/мм, Е=1,3; 3 - А=300Н/мм, Е=1,3; 4 - А=200Н/мм, Е=1,3; 5 - А=100Н/мм, Е=1,3; 6 - А=100Н/мм, Е=2,6; 7 - А=60Н/мм, Е=7,2)
Вибір двигуна приводу механізму переміщення для різних горно-геологічних умов.
Вибравши двигуни більшої потужності ЕКВ4-45-6-01 і ЕКВ4-60-6-01 проводимо аналогічні розрахунки моментів (рис.7 і рис.8), визначаємо межі частотного регулювання і вибираємо передавальне число.
Значення моменту Мс, який визначатиме межі регулювання, треба вибрати згідно з розрахунком потрібного тягового зусилля. Так для приводу на базі двох ЕКВ4-45-6-01 з Мс=600 Нм, нижній і верхній межі частотного регулювання матимуть значення a1=0,19 і a2=1,57. Вибране передавальне відношення u=131 забезпечуватиме діапазон робочих швидкостей подачі від 1,4 до 13 м/хв і максимальне тягове зусилля Fmax=422 кН. Це забезпечить високопродуктивну роботу комбайна на пластах з кутом нахилу до 35.
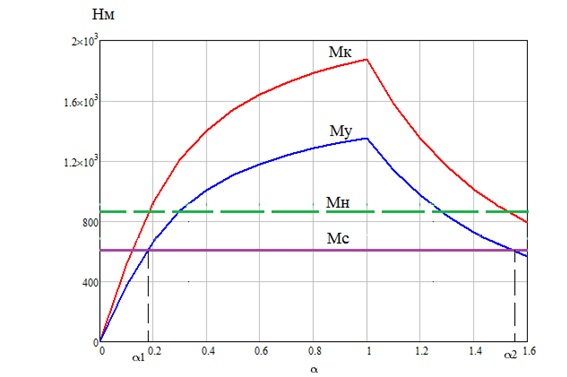
Рисунок 2. - Критичний і стійкий момент приводу механізму переміщення з двома електродвигунами ЕКВ4-45-6-01.
Застосування приводу ЕКВ4-60-01 дозволить ще більш розширити діапазон регулювання швидкості та сильніше зменшити потрібне передавальне відношення редуктора. Але застосування таких двигунів підвищить габарити приводу переміщення навіть якщо зменшаться габарити редуктора. Тому раціональніше в якості двигунів приводу механізму переміщення УКД400 використовувати ЕКВ4-45-6-01.
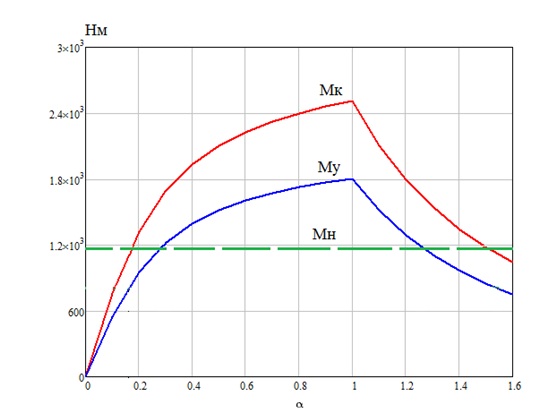
Рисунок 3. - Критичний і стійкий момент приводу механізму переміщення з двома електродвигунами ЕКВ4-60-6-01.
ВИСНОВКИ
В результаті виконаної роботи були визначені параметри механізмів переміщення очисного комбайна УКД400 з частотно-регульованим електроприводом, які дозволяють працювати за різних горно-геологічних умов шахти. Були визначені потрібні мінімальна і максимальна робочі швидкості механізму переміщення 1.4 і 7 м/хв відповідно.
Побудова залежностей стійкого і критичного моментів від відносної частоти дозволило визначити діапазон частотного регулювання. Так для приводу на базі двох ЕКВ4-30-6-01 з номінальним моментом Мн=600 Нм нижню і верхню межу регулювання склали a1=0,28 (14 Гц) і a2=1,28 (64 Гц) , але добитися необхідних швидкостей для такого діапазону можна лише прийнявши передавальне відношення редуктора u=197, що важко досягнути на практиці.
Вибір двигунів більшої потужності з підбором необхідних моментів і передавального відношення редуктора дозволить приводу на базі двох ЕКВ4-45-6-01 забезпечувати роботу на заданих швидкостях від 1,4 до 13 м/хв з тяговим зусиллям Fmax=422 кН на пластах з кутом нахилу до 35? .
Вибір двигуна ще більшої потужності в якості приводу механізму переміщення УКД400 буде не раціональним.
Список источников
1. Кондрахін В.П. Електричні механізми переміщення очисних комбайнів / В.П. Кондрахін, В.В. Косарєв, М.І. Стаднік.- Під заг. ред.В. П. Кондрахіна. - Донецьк: 2010.- 257 с.
2. Изделия угольного машиностроения. Комбайны очистные.Методика выбора параметров и расчета сил резания и подачи на исполнительных органах (взамен ОСТ12.44.258-84): КД12.10.040-99.- [Введен с 2000-01-01].-Донецк: 1999. - 75с.
3. Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - 6-е изд., доп. и перераб. М.: - Энергоиздат, 1981. - 576 с., ил.