
Рисунок 1 – Мелкомасштабная ГТУ c регулировочной задвижкой в трубопроводной сети
Автор: Кравец А. М., Коренькова Т. В.
Источник: Кременчугский национальный университет имени Михаила Остроградского.
Введение. Работа насосных установок (НУ) коммунального и промышленного водоснабжения, шахтных и карьерных водоотливных насосных станций (НС) характеризуется весьма низкими показателями надежности, обусловленными частым возникновением аварийных ситуаций, вызванных срабатыванием обратного клапана на выходе насоса при внезапном прекращении энергоснабжения, резким закрытием задвижек на выходе НС и коммуникационной сети потребителя и т.п. [1,2]. Отсутствие эффективных средств управления и гидрозащиты в таких режимах работы НС приводит к преждевременному износу технологического оборудования и неоправданным материальным затратам.
В работах [3,4] доказано, что закон управления трубопроводной арматурой существенным образом влияет на характер протекания переходных процессов в гидросистеме как в обычных, так и аварийных режимах НУ. Как правило, закрытие/открытие задвижек, затворов и т.п., оснащенных нерегулируемым электроприводом, производится без соблюдения требуемого темпа и продолжительности, что приводит к возникновению гидравлических ударов, повышенным динамическим нагрузкам в гидросети и негативно сказывается на функционировании всего технологического оборудования. В [5] показано, что одним из вариантов решения данной проблемы является использование электромеханической системы снижения динамических нагрузок (ЭССДН) в насосном комплексе на базе частотно-регулируемого электропривода запорно-регулирующей задвижки.
Рисунок 1 – Мелкомасштабная ГТУ c регулировочной задвижкой в трубопроводной сети
Цель работы. Разработка технических решений и выбор оборудования экспериментальной электромеханической системы снижения динамических нагрузок в условиях лабораторного комплекса гидротранспортной установки (ГТУ).
Материал и результаты исследования. Для решения целого ряда научно-исследовательских и научно-прикладных задач, связанных с разработкой энергоресурсосберегающих режимов работы гидротранспортных систем (ГТС) создан многофункциональный комплекс мелкомасштабнойГТУ (рис. 1) [6], позволяющий исследоватьпереходные процессы в системе при различных темпах управления трубопроводной арматурой, и оценивать динамические нагрузки в трубопроводной сети. В качестве запорно-регулирующей арматуры в экспериментальной установке используется чугунная клиновая задвижка ZETKAMA с обрезиненным клином диаметром 50 мм (рис. 2, а), установленная в напорном патрубке на выходе двух параллельно включенных насосов. Для ручного или автоматического открытия/закрытия она оснащена системой частотно-регулируемого электропривода. В качестве электропривода используется червячный мотор-редуктор С03218.WMHB1A.75E фирмы David Brown с цилиндрической ступенью и передаточным числом 8,59, оснащенный трехфазным асинхронным двигателем (АД) мощностью 0,75 кВт и частотой вращения выходного вала 337 об/мин (рис. 2, б). Изменение темпа управления задвижкой осуществляется путем изменения частоты питающего напряжения АД с помощью низковольтного (0,4 кВ) трехфазного преобразователя частоты (ПЧ) Mitsubishi FRD740-036EC мощностью 1,5 кВт (рис. 2, в).
Для определения положения запорного органа задвижки установлен датчик импульсов, в качестве которого используется активно-индуктивный датчик Carlo Gavazzi IA18DSF05PO (рис. 2, г..)
Для контроля и индикации положения рабочего органа задвижки используется устройство управления фирмы ОВЕН ПКП1И-Щ1.RS (рис. 2, д), которое позволяет осуществлять: контроль положения задвижки по числу оборотов вала и периоду следования импульсов, поступающих с датчика на валу задвижки; регистрацию положения задвижки и управление электроприводом по интерфейсу RS-485. Для связи системы снижения динамических нагрузок с персональным компьютером (ПК) используется автоматический преобразователь интерфейсов USB/RS- 485 AC4 фирмы ОВЕН (рис. 2, е), который позволяет осуществлять считывание информации о степени открытия задвижки в процентном отношении, а также установить необходимую частоту питания на ПЧ.
На рис. 3 приведена принципиальная схема подключений элементов экспериментальной системы снижения динамических нагрузок в лабораторной гидротранспортной установке.
Для формирования различных траекторий закрытия задвижки используется специальное программное обеспечение (рис. 4), разработанное в среде графического программирования LabVIEW.

Рисунок 2 – Оборудование экспериментальной системы снижения динамических нагрузок в лабораторной гидротранспортной установке: а) запорно-регулирующая задвижка; б) мотор-редуктор; в) преобразователь частоты; г) устройство управления и защиты электропривода задвижки; д) индуктивный датчик импульсов; е) автоматический преобразователь интерфейсов USB/RS-485
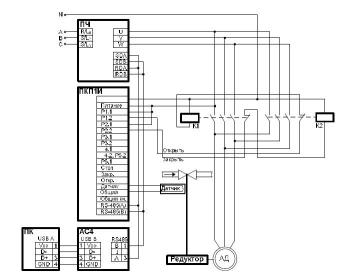
Рисунок 3 – Принципиальная схема экспериментальной системы снижения динамических нагрузок лабораторной гидротранспортной установки

Рисунок 4 – Интерфейс программы для задания различных траекторий закрытия задвижки
Выводы. Разработанная экспериментальная электромеханическая снижения динамических нагрузок в составе лабораторной ГТУ позволяет выполнить исследования по анализу переходных процессов и оценке величины повышения давления в гидросистеме в аварийных режимах, связанных с внезапным отключением электроснабжения, а также сформулировать практические рекомендации по формированию законов управления трубопроводной арматурой, исключающих недопустимые динамические нагрузки и гидроудар.
1. Вишневский К.П. Переходные процессы в напорных системах водоподачи / Вишневский К.П. – М. :
Агропромиздат, 1986. – 135 с.
2. Фокс Д.А. Гидравлический анализ неустановившегося течения в трубопроводах / Фокс Д.А. – М : Энергоиздат, 1981. – 248 с.
3. Кравец А.М. Особенности динамических режимов в гидротранспортных системах с управляемой трубопроводной арматурой / А.М.Кравец, Т.В. Коренькова // Вісник КДПУ. Наукові праці КДПУ. – Вип. 3 (44). Ч.1. – Кременчук: КДПУ, 2007. – С. 162–167.
4. Кравец А.М. Математическая модель гидротранспортного комплекса с управляемой трубопроводной арматурой / А.М. Кравец, Т.В. Коренькова // Електромеханічні і енергозберігаючі системи. Щоквартальний науково-виробничий журнал. – Вип. 2 (6). – Кременчук: КДПУ, 2009. – C. 29–32.
5. Кравец А.М. Способ снижения динамических загрузок в насосном комплексе с управляемым гидроклапаном / А.М.Кравец, Т.В. Коренькова // Електромеханічні і енергозберігаючі системи. Щоквартальний науково-виробничий журнал. – Вип. 3 (11). – Кременчук: КДУ, 2009. – C. 41–45
6. Коренькова Т.В. Экспериментальный комплекс-тренажер гидротранспортной установки / Т.В. Коренькова, А.А. Сердюк, А.Л. Перекрест, В.Н. Шоколов // Вісник КДУ. Наукові праці КДУ. – Вип. 4 (63). Ч. 2. – С. 64–67.