
Автор: Червинська Н. В., Бессараб В. І., Червинський В. В.
Источник: Наукові праці ДонНТУ., http://ea.donntu.ru
У статті представлено алгоритм координації локальних систем управління окремими ділянками водовідливу у дворівневій ієрархічній системі управління комплексом шахтного водовідливу з використанням дискретно-подієвого управління, що дозволяє забезпечити суміщення робочого часу насосів головного водовідливу з періодами позапікового навантаження енергосистеми.
Ключові слова: комплекс водовідливу, координація, дискретно-подієве управління, позапікове споживання електроенергії, система управління.
Загальна постановка проблеми
У попередніх роботах [2-4] авторами розроблено дворівневу ієрархічну систему управління комплексом шахтного водовідведення як дискретно-подієвим об’єктом. Синтез алгоритму управління виконано з використанням методики синтезу управління за заданими показниками якості на основі теорії управління дискретно-подієвих систем, які дозволяють скоротити час роботи водовідливу в години пікового навантаження енергосистеми шахти.
Даний об’єкт є складним і розподіленим у просторі, містить головні, допоміжні та ділянкові водовідливні установки, які розглядаються як окремі технологічні модулі (ТМ). У розроблюваній дворівневій ієрархічній системі управління, загальна схема якої наведена в [3], пропонується на верхньому рівні (оптимізація режиму) забезпечити оптимальну координацію між локальними системами управління (ЛСУ) на основі прийнятих глобальних показників якості та математичних моделей елементів нижнього рівня, а також поточного аналізу збурень. Нижній рівень (безпосереднє управління фізичними параметрами) повинен виконувати рішення локальних задач управління технологічними модулями.
Постановка задач дослідження
Для розробленої багаторівневої системи автоматичного управління комплексом головного водовідливу синтезовані алгоритми дискретно-безперервного управління локальними підсистемами. Автономне управління кожною підсистемою не дозволяє досягти якісного управління позапіковим споживанням електроенергії. Для вирішення цієї проблеми пропонується сполучити алгоритми дискретно-подієвого управління позапіковим споживанням електроенергії й дискретно-безперервного управління локальними підсистемами. Таким чином, за рахунок координації роботи всіх ділянок водовідливу шахти з використанням прогнозування припливу у водозбірники можливо забезпечення сполучення робочого часу насосів головного водовідливу з періодами позапікового навантаження енергосистеми.
Вирішення задачі та результати досліджень
Основою для розробки системи верхнього рівня є визначення цілей, що стоять перед координатором [1]. Як правило, при математичному описі задач управління під ціллю розуміють знаходження максимального чи мінімального (оптимального) значення цільового функціонала та відповідних оптимальних змінних. Функціонал може бути задано у вигляді інтеграла:
або через значення цільових показників у кінцевий момент часу Тs:

де ωi – вектор, передаваний координатору, що містить агреговані показники роботи i-ї ЛСУ; N – кількість ЛСУ.
Вектор ωi повинен містити показники, достатні для оцінки роботи ЛСУ координатором.
Верхній рівень розглядуваної дворівневої системи управління комплексом водовідливу повинен забезпечувати координацію між ЛСУ на основі деяких глобальних показників якості, дискретної абстракції ЛСУ й аналізу збурень. У роботі всієї системи виділяються два основних режими: перехідний та сталий. Кожен з цих режимів передбачає використання відповідного алгоритму координації. У сталому режимі алгоритм координації полягає в завданні керованих інваріантів ЛСУ, що забезпечують виконання глобального показника якості. Перехідний режим обумовлено істотною зміною режимів роботи всього комплексу водовідливу, пов'язаною із впливом збурень, зміною політики управління вищими рівнями, або аварійними режимами.
Глобальна цільова функція для будь-якого з двох зазначених режимів задається як показник якості верхнього рівня і розглядається як інтегральна оцінка близькості до оптимального режиму.
Під оптимальним режимом для розроблюваної системи управління розуміється такий графік роботи комплексу водовідливу, коли всі водовідливні установки працюють тільки в періоди позапікового навантаження енергосистеми. Відповідно, показник якості визначається як:

де Pij(t), i=1,2…N – потужність j-го насоса i-ї водовідливної установки; tijkнп, tijkкп – моменти початку і закінчення відкачування в період пікового навантаження j-м насосом i-ї локальної підсистеми в k-му циклі роботи; Mij – кількість циклів роботи j-го насоса i-ї локальної підсистеми за добу; Li – кількість насосів i-ї локальної підсистеми.
Показник якості (3) відбиває ефективність системи з економічної точки зору. Ефективність з погляду вирівнювання графіка навантаження енергосистеми може бути отримана з виразу (3) у вигляді наступного показника:

де Pен – базовий графік електричного навантаження енергосистеми без урахування водовідливу як споживача-регулятора; Pвд – графік електричного навантаження водовідливу; Pср – середнє електричне навантаження енергосистеми.
Розглянемо загальну схему алгоритму координації. Кожна ЛСУ функціонує в одному з режимів, поки не будуть виконані умови переходу в новий стан. Елементи нижнього рівня більшу частину часу працюють незалежно. Про поточний стан локального модуля підсистема нижнього рівня повідомляє координатору за допомогою вектора агрегованих показників якості ωi, який визначається як:

де Vi(t) – поточний рівень води в водозбірнику i-ї локальної підсистеми; Qi(t) – продуктивність насосів i-ї локальної підсистеми; Hi(t) – напір у нагнітальному трубопроводі i-ї локальної підсистеми.
На основі показника Vi(t) координатор здійснює прогнозування зміни рівня води в водозбірнику i-ої локальної підсистеми.
На основі показника Qi(t) координатор здійснює прогнозування зміни рівня води в водозбірнику тієї локальної підсистеми, в яку здійснюється перекачування води змводозбірнику i-ї локальної підсистеми.
Координатор визначає нові завдання дискретних абстракцій і тривалості переходів за допомогою вектора координуючих параметрів:

У сталому режимі вектор (6) розраховується на основі алгоритму, описаного в [2].
Алгоритм координації в сталому режимі визначається наступним чином.
Час включення j-ї установки на k-му кроці згідно з алгоритмом [2] визначається за наступним виразом:

де qj(t) – природний приплив j-ї установки; Qj(t) – продуктивність насоса j-ї установки; Vjk – рівень заповнення водозбірника j-ї установки на момент включення; Vверх.j – максимальний рівень заповнення водозбірника j-ї установки; tнпр – момент часу початку наступного пікового режиму;  – момент часу закінчення відкачування з j-го водозбірника;
– момент часу закінчення відкачування з j-го водозбірника;
Vijk – рівень заповнення водозбірника j-ї установки, що визначається попередньою i-ю установкою, м3.
Vijkвизначається наступним чином:

де lij – компоненти матриці зв'язку L, яка визначає наявність зв’язку між i-ю й j-ю установками: L =|lij|, lij∈ {0,1}.
Загальний алгоритм роботи підсистеми нижнього рівня можна описати наступним чином. ЛСУ починає роботу з отримання початкових умов – виміру рівня у всіх водозбірниках. Після цього виконується прогноз величини припливу на наступну добу. Далі перевіряється можливість роботи комплексу водовідливу з відкачування прогнозного припливу в поточні періоди позапікового навантаження. Якщо результат розрахунку підтверджує таку можливість, запускається алгоритм дискретно-подієвого управління і розраховується стартове управління для всіх ТМ. Після цього із заданою періодичністю виконується контроль рівня в кожному водозбірнику.
Як тільки настає момент часу ui, розрахований алгоритмом, здійснюється вибір насоса для роботи в поточному циклі, і запускається його заливальний пристрій. Контроль заливання виконує датчик контролю заливання, який по завершенні операції видає сигнал m=1. Після цього подається сигнал на включення двигуна насоса, а потім виконується процедура відкриття засувки, контрольована датчиком положення засувки.
Як тільки засувку повністю відкрито, насос виходить у сталий режим. У процесі роботи здійснюється постійний контроль електричних параметрів двигуна, температури підшипників, величини подачі та рівня води в водозбірнику. Якщо який-небудь з контрольованих параметрів виходить за припустимі межи, подається аварійний сигнал, виконується процедура відключення насоса і закриття засувки, а потім – процедура запуску другого насоса. Якщо всі контрольовані параметри не виходять за межі припустимих, процедура відключення насоса виконується, коли рівнемір видає сигнал про досягнення водою нижнього рівня в водозбірнику.
Алгоритм координації в дворівневій системі управління наведено на рис. 1.
Однією з умов перехідного режиму є перевищення сигналами збурень заданих обмежень. Система переключається зі сталого режиму в перехідний, коли при визначенні графіка роботи водовідливу у поза піковий час на найближчу добу не можуть виконуватися основні технологічні вимоги до роботи комплексу водовідливу. Такий варіант можливий при виконанні наступної вимоги: у момент часу uik, визначений для прогнозованого на найближчий цикл припливу qik(t), рівень води Vik(t) повинен задовольняти наступній умові:
У цьому випадку в залежності від напрямку зміни швидкості припливу (збільшення або зменшення) необхідно виконати наступні дії:
1. Якщо , то необхідно виконати перерахунок часу циклу для i-го насоса в бік його збільшення, тобто:
, то необхідно виконати перерахунок часу циклу для i-го насоса в бік його збільшення, тобто:
Крім того, якщо i-й насос є насосом ділянкового або проміжного водовідливу, то необхідно скоректувати час роботи насоса вищого горизонту. Оскільки в даному випадку об’єм перекачаної води в нього i-м насосом зменшується, зменшується відповідна величина Qi(t).
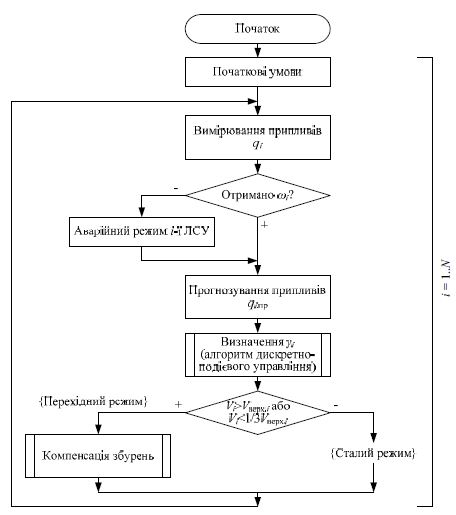
Рисунок 1 — Алгоритм координації
2. Якщо , то необхідно виконати перерахунок часу циклу для i-го насоса у бік його зменшення:
, то необхідно виконати перерахунок часу циклу для i-го насоса у бік його зменшення:
Якщо i-й насос є насосом ділянкового або проміжного водовідливу, то час роботи насоса вищого горизонту коректується у більший бік, оскільки відповідна величина Qi(t) збільшується.
До аварійних режимів функціонування розробленої системи відносяться режими, зв’язані з ситуаціями порушення її цілісності. Такі ситуації можуть виникати за різних умов, однак у цілому їхній вплив на систему можна описати як втрату зв’язку з однією чи декількома ЛСУ. Для повноцінного функціонування системи необхідно, щоб виникнення такої ситуації на одному з ТМ не впливало на роботу комплексу в цілому.
Для аварійного режиму роботи системи можливий наступний алгоритм:
1. ЛСУ, з якою втрачено зв’язок, переключається в аварійний режим роботи: включення й вимкнення насосів відбувається відповідно по верхньому і нижньому рівням води в водозбірнику.
2. Координатор фіксує значення швидкості припливу qав на основі останніх даних, що надійшли з рівнеміра даної ЛСУ.
3. За інформацією про швидкість припливу і режим роботи даної ЛСУ координатор перераховує час роботи насосів вищих горизонтів. При цьому вимога позапікової роботи може не виконуватися.
Оскільки такий режим роботи системи відноситься до аварійного, передбачається, що причина аварії може бути усунена за мінімальну кількість циклів роботи комплексу. Як тільки зв’язок поновлюється, система виходить з аварійного режиму та перемикається в перехідний режим.
Для оцінки якості розробленої багаторівневої ієрархічної системи управління використовувався пакет Matlab. Результатами моделювання є показники якості глобального управління. В таблиці 1 зведено показники якості верхнього рівня для розробленої системи автоматичного управління в сталому та перехідному режимах і для управління тільки на основі локальних критеріїв.

На рис. 2 представлено результати моделювання дворівневої ієрархічної системи автоматичного управління комплексом водовідливу шахти з використанням розробленого алгоритму координації. Результати представлено в вигляді графіків зміни рівня води в водозбірниках ДП «Шахтоуправління «Південнодонбаське №1» для ненульових початкових умов.
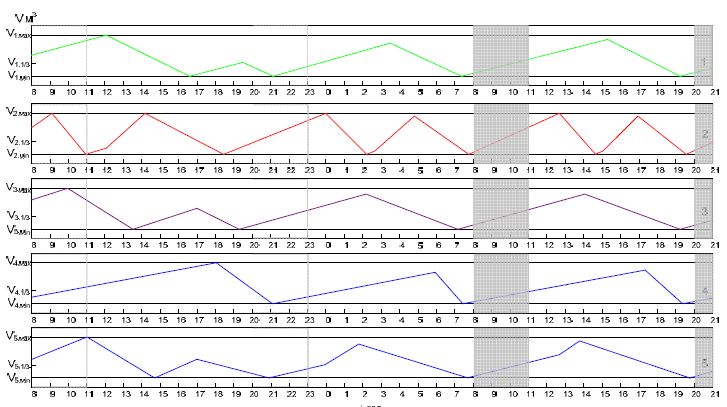
Рисунок 2 — Графіки зміни рівня води в водозбірниках
Висновки
1. Розроблено дворівневу ієрархічну систему управління комплексом шахтного водовідливу, що сполучає алгоритми дискретно-подієвого управління позапіковим споживанням електроенергії на верхньому рівні й дискретно-безперервного управління локальними підсистемами на нижньому.
2. Розроблено алгоритм координації локальних систем управління окремими ділянками водовідливу шахти з використанням дискретно-подієвих моделей технологічних модулів, що забезпечує синхронність і циклічність роботи комплексу водовідливу в стаціонарних і нестаціонарних режимах.
Список використаної літератури
1. Алиев Р.А. Методы и алгоритмы координации в промышленных системах управления / Р.А. Алиев, М.И. Либерзон. – М.: Радио и связь, 1987. – 208 с.
2. Червінська Н.В. Алгоритм управління позапиковим електроспоживанням комплексу шахтного водовідливу / Н.В. Червінська, В.І. Бессараб, В.В. Червинський // Наукові праці Донецького національного технічного університету. Серія «Проблеми моделювання та автоматизації проектування» (МАП–2011). – 2011. – Вип. 9 (179). – С. 246-254.
3. Червинский В.В. Иерархическая двухуровневая система управления дискретно–непрерывным объектом / В.В. Червинский, ВИ. Бессараб, Н.В. Червинская // Збірник наукових праць Севастопольського національного університету ядерної енергії та промисловості. – 2008. – Вип. 1 (25). – С. 176-183.
4. Червинский В.В. Многоуровневая система управления комплексом водоотлива горнодобывающего предприятия / В.В. Червинский, В.И. Бессараб, Н.В. Червинская // Наукові праці Донецького національного технічного університету. – 2008. – Вип. 15(130). – С. 53-58.