Аннотация
Барышев В.В., Светличная В.А. Функциональная структура компьютеризированной системы управления транспортными потоками в условиях большого города. В статье обоснована необходимость разработки и актуальность компьютерной системы управления транспортными потоками большого города, проанализированы существующие системы, используемые для управления транспортными потоками, определены основные функции такой системы, раскрыты действия, которые реализуются в каждой функции, построена функциональная схема.
Ключевые слова:
транспортный поток, светофор, зеленая волна, имитационное моделирование, средняя скорость, магистраль.
Общая постановка проблемы
Возрастающие объемы автомобильных перевозок, увеличение скоростей и интенсивности движения и связанный с ними рост числа дорожно-транспортных происшествий предъявляет новые, все более высокие требования к техническому совершенству автомобильных дорог, их инженерному оборудованию и состоянию, транспортно-эксплуатационным характеристикам и организации движения в процессе эксплуатации.
Важную роль в решении этих задач играет создание автоматизированных систем управления движением. Разработка таких систем остается актуальной на протяжении многих лет. С одной стороны это объясняется резким увеличением количества автомобилей, а следовательно увеличением интенсивности потов транспорта, а с другой стороны все возрастающими возможностями технических средств регистрации и отслеживания движения транспорта и возможностями компьютерной техники.
К настоящему времени разработан целый ряд принципов и систем управления транспортными потоками. К ним можно отнести такие системы как ИСУТП (интеллектуальная система управления транспортными потоками), АСУДД (автоматизированная система управления дорожным движением), АРДАМ (автоматизированное регулирование движения на автомобильных магистралях) [1]. После проведения анализа существующих подсистем можно сказать, что они не позволяют в полной мере улучшить динамику движения транспортных потоков.
Цель компьютеризированной подсистемы управления транспортными потоками может быть сформулирована следующим образом: при переменных характеристиках транспортного потока и аппарата обслуживания с учетом состояния метеорологических условий в каждый момент времени обеспечивать требуемые показатели функционирования дорожного движения (скорость, пропускную способность и безопасность движения).
Необходимой предпосылкой создания системы управления транспортными потоками на автомобильных магистралях является формирование стратегических концепций, комплекса моделей управляемого объекта и основанных на них алгоритмов переработки информации и принятия управляющих решений.
Решение задачи
Объектами управления в этих системах являются транспортный поток на автомобильной магистрали и транспортные потоки на въездах-выездах. Средствам управления служат светофоры на перекрестках, въездах и съездах.
С целью достижения эффективного управления транспортными потоками рассматривается разработка компьютерной системы, с помощью которой в реальном времени на основе поступающих входных данных будут определяться рациональные значения скорости движения транспортного потока и длительности функционирования светофоров.
Система реализует следующие основные функции:
- сбор данных о транспортном потоке на каждом регистрационном пункте;
- обработка данных и организация хранения;
- расчет рекомендуемых значений параметров движения и передача их для регулирования потоком.
Каждая из перечисленных функций выполняет определенные действия.
Сбор данных о транспортном потоке будет включать в себя:
- измерение интенсивности потока, т.е. подсчет количества автомобилей, проехавших за единицу времени мимо регистрирующего объекта;
- определение количества автомобилей, скопившихся перед светофором за период горения красного света.
Сбор данных будет осуществляться по всем направлениям рассматриваемого перекрестка в одну и другую стороны. Статическими данными будут расстояния между перекрестками, параметры самой магистрали (количество полос, ограничения по скорости и т.д.). Вся информация может быть собрана с помощью «умных» светофоров [3], которые уже используются в крупных городах разных стран. «Умные» светофоры имеют встроенные датчики сбора информации, которые связываются с сервером через GSM-модем. Светофоры также могут быть оснащены камерами, которые фиксируют дополнительную информацию.
Многие имеют табло отсчета времени, показывающие, сколько осталось времени до смены статуса светофора. Все светофорные объекты подключены к единой системе регулирования движения, которая находится в пункте управления светофорами. Координаторы могут менять сигналы светофоров из пункта управления, а также просматривать все данные, которые поступают с датчиков.
С помощью функции обработки данных и организации хранения основные параметры, которые характеризуют движение транспорта, будут сохраняться и обрабатываться.
Для реализации функции расчета рекомендуемых значений параметров движения используются расчетные методы и методы моделирования. Одним из наиболее распространенных методов, организующих движение транспорта в крупных городах, является принцип «зеленой волны», с помощью которого на определенных магистральных дорогах города задается длительность сигналов светофора таким образом, чтобы обеспечить «зеленую волну», т.е. обеспечение безостановочного движения транспорта за счёт согласованного включения зелёного света светофора на перекрёстках. Принцип работы «зеленой волны» приведен на примере организации движения по улице с односторонним движением [2]. На рис. 1 слева схематически показан план улицы с перекрестками A, B, C, D, E расположенными на одинаковом расстоянии друг от друга.
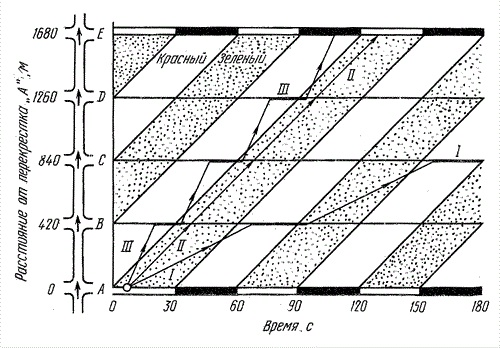
Рисунок 1 – График «зеленой волны» и диаграмма «путь - время» для трех автомобилей (для упрощения диаграммы не показано время желтого сигнала).
В правой части рисунка приведен график, на котором по горизонтальной оси отложено время, по вертикальной - путь, проходимый автомобилем при движении от перекрестка A к перекрестку E. Широкие заштрихованные полосы на графике - ленты времени, в течение которых автомобиль может безостановочно проезжать все перекрестки, придерживаясь определенной скорости. Величина скорости определяется как тангенс угла наклона ленты времени к горизонтальной оси. Используя этот принцип в реальном времени и учитывая факторы, влияющие на изменение характеристик потока, можно улучшить качественные характеристики транспортного потока.
Используя язык UML, можно представить функции компьютеризированной системы в следующем виде:
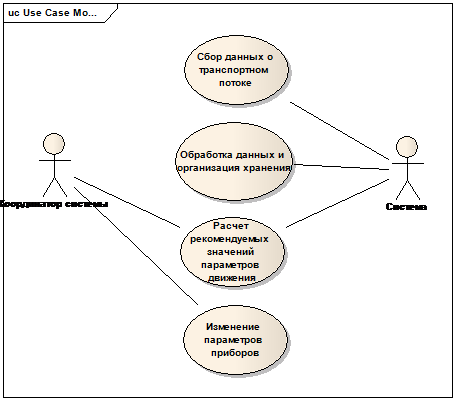
Рисунок 2 – Функциональная схема системы.
Используя измеренные значения характеристик транспортного потока, можно будет определить плотность потока – число автомобилей на единицу длины дороги (например, на 1 км) [4]. Связь между основными характеристиками потока автомобилей выглядит таким образом:
N = VQ,
где N –интенсивность движения, Q – плотность потока, V – средняя скорость движения.
Если плотность потока на магистрали будет очень большой, должен выполняться расчет рекомендуемых значений параметров движения.
Для этого нужно знать, как определить длительность сигналов светофора и скорость автомобиля [2]. Управляющим воздействием для светофорного объекта, по отношению к одному направлению движения, могут быть параметры:
Длительность красного сигнала находится из соотношения
tк = Т - tз - tж,
Примем величины Т, tз и tж одинаковыми для всех светофоров магистрали и найдем значение Dt0,i - начало включения зеленого сигнала i-того светофора относительно светофора в точке 0, обеспечивающие беспрепятственный пропуск картежа автомобилей по всей магистрали в режиме "зеленой волны".
Представим магистраль с односторонним движением в виде отрезка, который разбит на отдельные участки в некоторых известных точках.
Пусть L - общая протяженность магистрали, а li - расстояние между смежными (i+1) и i перекрестками (i = 0, 1, 2, 3,…, n). При таком разбиении

Движение головного автомобиля по магистрали в кортеже, сформированном в точке 0, описывается уравнением

где V - рекомендованная скорость движения автотранспортных средств, км/ч.
Для первого светофорного объекта в точке 1 величина t1 l0,1 / V, определяет значение Dt0,1 - начало включения зеленого сигнала относительно светофора в точке 0.
В общем случае для (k+1)-го светофора (k < n) получим

где k = 1, 2, 3,…, n-1.
Таким образом, видно, что длительность сигналов светофора зависит от рекомендуемой скорости прохождения автомобиля отрезка дороги и возможно управлять как скоростью, так и длительностью сигнала.
Для поиска эффективных стратегий управления транспортными потоками в большом городе и организации дорожного движения необходимо учитывать широкий спектр характеристик транспортного потока, закономерности влияния внешних и внутренних факторов на динамические характеристики транспортного потока. В настоящее время одним из наиболее используемых методов, позволяющих решить задачи организации и управления дорожным движением, является метод имитационного моделирования, реализация которого требует создания адекватной модели транспортного потока с учетом сложности конфигурации транспортных развязок, внешних воздействий, и случайных факторов влияющих на всю структуру взаимодействия движущихся потоков.
Результатами решения задачи должны быть измененные длительности сигналов светофоров (длина цикла, длительность зеленного и красного света) и рекомендуемая скорость движения на заданном участке. Выделив функциональную структуру системы, можно изобразить алгоритм решения задачи с помощью диаграммы последовательности на рис. 3.
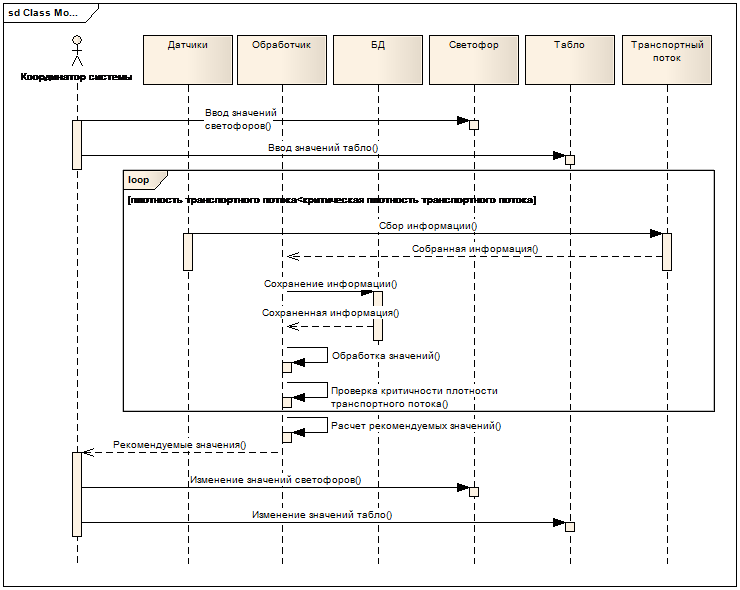
Рисунок 3 – Диаграмма последовательности системы
Выводы
В результате проведенных исследований была обоснована необходимость разработки компьютеризированной системы управления транспортными потоками большого города, определены ее основные функции, проанализированы существующие методы расчета рациональных параметров транспортных потоков, приведен принцип метода «зеленой волны», предопределено использование имитационного моделирования для нахождения рекомендуемых параметров управления движением с учетом сложности конфигурации транспортной системы и влияния целого ряда случайных факторов.
Список источников
- Дерех З.Д., Рейцен Є.О. Дослiдження пiдвищення ефективностi автоматизованих систем керування дорожнiм рухом в Українi // Наук.-техн. вiсник "Безпека дорожнього руху України". - 1999. - 1(2). - С. 79 - 85.
- Кременец Ю.А., Печерський П.П. Технические средства регулирования дорожного движения. - М.: Трансп., 1981.
- Интеллектуальные транспортные системы — проблемы на пути внедрения в России / Интернет-ресурс. - Режим доступа: http://habrahabr.ru/post/175497 - Загл. с экрана.
- Руководство по оценке пропускной способности автомобильных дорог. – М.: Транспорт, 1982 г. – 95 С.
- Левашев А.Г. Михайлов А.Ю. Головных И.М. Проектирование регулируемых пересечений: Учеб. пособие. – Иркутск: Изд-во ИрГТУ, 2007 г. – 208 С.