
Abstract
Content
- Introduction
- 1. Theme urgency
- 2. Goal and tasks of the research
- 3. Study classes of robots
- 3.1 Prefabricated devices
- 3.2 Manipulators
- 3.3 Commercial robots
- 4. Pathfinding algorithms
- 4.1 Dijkstra's algorithm
- 4.2 Jump Point Search Algorithm
- 5. Neural networks
- Conclusion
- References
Introduction
Robotics is one of the most important areas of scientific and technological progress, in which the problems of mechanics connected to the problems of management and artificial intelligence. As an integrated discipline robotics requires developers of knowledge and skills in areas such as mechanics, electronics, programming, project management. As a result, robotics differs from a specialist open-minded and systemic thinking.
In the literature source [1] gives the following definition of the robot – controlled device using the electronic card or computer that can be programmed to perform certain operations.
There are three classes of devices robotics is prefabricated devices, manipulators and commercial robots.
1. Theme urgency
The robot can report directly to operator commands can operate on a pre-made ??program or follow a set of general guidelines using artificial intelligence technology. These tasks can facilitate or even replace human work in manufacturing, construction, when working with heavy loads, hazardous materials, and other heavy or dangerous to human conditions, so the relevance of the topic is difficult to overestimate [2].
This work has been devoted to the improvement of algorithms to find ways and adapt them for robots.
2. Goal and tasks of the research
Goal of this study is to determine the classes of robots, as well as the study of their software. Search and analysis of existing algorithms in the field of artificial intelligence and the possibility of their use in robots.
The main tasks of the study:
- Study of the prefabricated devices;
- Study of robot manipulators;
- Study of commercial robots;
- Simulation software for robotics devices;
- Study of algorithms to find shortest ways.
3. Study classes of robots
3.1 Prefabricated devices
One such development is the experimental compact maneuverable robot "Intellect -9". The main advantage of this robot is a good maneuverability and control in order to achieve accuracy in management.
Structural diagram of the software robot "Intelligence-9" is shown in figure 1. The Software contains the core software system, which includes drivers to communicate with the hardware of the robot and task switching means, and a set of software that provides a number of tasks [3].
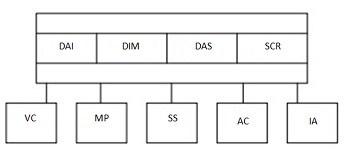
Figure 1 – Robot's scheme software [3]
Currently developed driver of air interface (DAI), the driver interface motion (DIM), the driver of alarm system (DAS) and the sound card driver (SCR). The structure of the robot software also includes the following application tasks: voice control (VC), motion planning (MP), speech synthesis (SS), adjustments and calibration (AC). Also planned to connect the problem of image analysis (IA) [3].
3.2 Manipulators
Manipulator - instrument or device for regulation of complex production processes, which under the control of the operator performs actions (manipulation), similar to the actions of the human hand or automatically effective.
Simple manipulators can move up and down only within a limited arc; complex mechanisms actuated by a control lever. Typical simple manipulator to capture can lift up to 65 kg, but some systems are capable of lifting up to 200 kg [4-5].
Consider an example of such a device, a robot KATANA. It is depicted in figure 2.

Figure 2 – Robot KATANA [6]
As can be seen from Figure 2, this device is a mechanical arm. Next, consider the software.
The literature [6] indicated that the software to control the robot Katana is a library of KNI 4.3.0 (Katana Native Interface) an open source C++ language. Software developer to control the robotic arm Katana also available description of the system commands the robot itself. This allows us to develop system software control of a robot manipulator for various domains. On the other hand, to analyze the use of this library for scientific publications is quite difficult, since users are only the library itself and the description of the command language of the robot. KNI library can also be used in the simulator robots Webots, creating models of robots Neuronics AG. Therefore, when developing software for managing work using two methods:
- Modeling in environment simulator;
- Programming and testing using hardware and software system using a robot.
3.3 Commercial robots
Such projects include projects that invested a lot of money by manufacturing companies. As a rule, they have the technical documentation and convenient system for programming their product. Consider the example of a robot Robotino.
As a model for studying the characteristics of mobile systems is convenient to use a mobile robotic system Robotino ( Figure 3), equipped with an omni-directional drive. Three drive motor system provides movement in all directions under the horizontal plane and rotating about a vertical axis on the ground. The system is equipped with a video camera (5) and two types of sensors: digital - to monitor the actual speed (1) and analog - measuring the distance (3). Such equipment guarantees the fulfillment of a wide range of requirements for systems of this type [7].
Each of the sensors may be claimed individually through the input-output interface. Thus, you can avoid a collision with obstacles. Impact sensor (2) is a narrow rubber tube placed around the perimeter of the chassis Robotino. Inside the tube are two electrically conductive strip switch between which a small gap. When faced with an obstacle , these surfaces merge with each other, thereby forming a signal to turn off the drive. This trip is possible in case of a collision with an obstacle when moving in any direction.
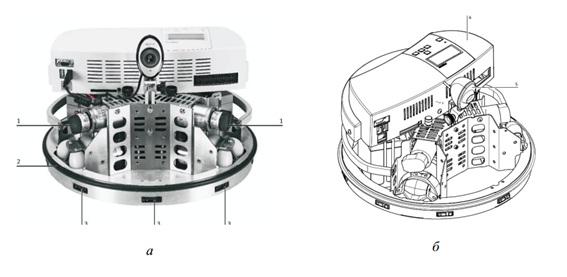
Figure 3 – The design of the robot Robotino: а – occupancy sensors, б – control unit and camcorder [8]
The control unit comprises a processor with a compact memory card, module and input-output interfaces. Robotino equipped with nine infrared sensors, which are installed around the perimeter of the chassis angle of 40 degrees to each other. These sensors can detect the distance to obstacles to movement Robotino. With the help of these sensors can measure the distance to obstacles 4...30 cm with the camcorder operator can visually monitor, control and evaluate the path of the Robotino based on the image displayed on the screen using the PC software shell «Robotino View». The presence of batteries allows Robotino autonomously navigate within the network WLAN. Multiple sensors, a video camera and software «RobotinoView» system must provide "intelligence".
In addition to Robotino can be connected inductive and infrared optical sensors that interface IO bind all driving direction [9].
Analyzing software Robotino were allocated 2 groups of software:
- Robotino view for visual programming;
- Robotino SIM for simulation and visualization of behavior.
In literature [10] was proposed hierarchy construction software (figure 4):
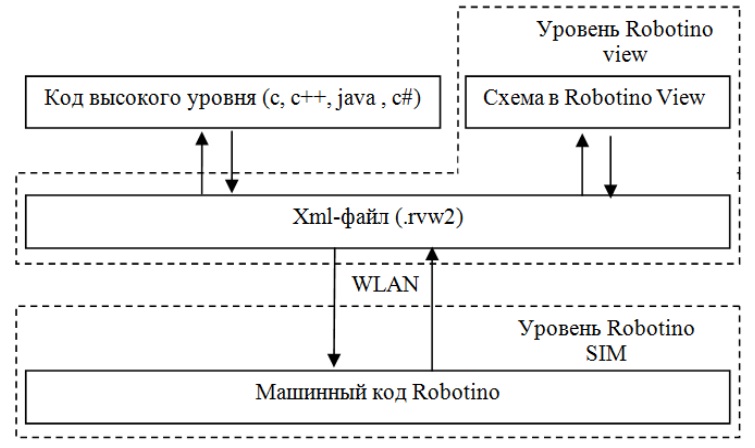
Figure 4 – Hierarchy of building software for Robotino [10]
In this scheme, there are two levels: level Robotino view - the level of constructing the circuit to control the robot, and the level of Robotino SIM - the presentation layer. Interaction between the native code and the code of the robot is carried out by a high level. Rvw 2 file. This file is a t layout xml, and each element has its own position in the file. Controlling the robot is remotely controlled via wireless WLAN ( interaction between the xml- file and machine code Robotino). It should also be noted that data to the robot (such as sensor data) are transmitted on the same channel [10].
4. Pathfinding algorithms
4.1 Dijkstra's algorithm
The shortest path problem is to find the shortest path from a given initial vertex a selected vertex z. The following two problems &ndash direct generalization of the above problem of the shortest path [11-13].
- For a given initial vertex to find the shortest path from a to all other vertices;
- Find the shortest path between all pairs of vertices.
It turns out that almost all the methods for solving the shortest path from a given initial vertex of a selected vertex z and also allow you to find the shortest path from a vertex to all other vertices of the graph. So they can be used to solve the problem one little additional computational cost. On the other hand, the problem can be solved or 2 n times by applying the algorithm for Problem 1 with different initial vertices, or once by applying a special algorithm.
Efficient algorithm for determining the length of the shortest path from a fixed vertex to any other proposed 1959 Danish mathematician E. Dijkstra. This algorithm is applied only when the weight of each edge (arc) is positive.
4.2 Jump Point Search Algorithm
This algorithm is an improved algorithm pathfinding A*. JPS accelerates the search path, "jumping" many places that should be viewed. Unlike these algorithms JPS requires pretreatment or additional memory costs. This algorithm is presented in 2011, and in 2012 received the highest responses [14].
Example of using this algorithm is shown in the following animation (figure 5).
Figure 5 – Example of the algorithm Jump Point Search
(animation: 7 frames, 7 cycles of repeating, 55 kilobytes)
5. Neural networks
Research on neural networks associated with the fact that the method of information processing in the human brain is fundamentally different from the methods of conventional digital computers. The brain is a highly complex, non-linear, parallel computer (information processing system). It has the ability to organize their structural components, called neurons (neuron), so that they could perform specific tasks (such as pattern recognition, signal processing sensory, motor function) is many times faster than they can afford to pay the high-speed modern computers. An example of such information processing tasks can serve as a common vision (human vision) [15].
The literature [16] gives the following definition that the neural network – it is a huge distributed parallel processor, composed of elementary units of information processing, accumulating experimental knowledge and provide them for further processing. The neural network is similar to the brain from two perspectives:
- Knowledge comes to the neural network of the environment and are used in the learning process;
- A knowledge apply the connections between neurons, called synoptic scales.
Conclusion
The analysis of the current state of the problem shows that:
- Modern methods and applications of artificial intelligence technology can be used for robots;
- Existing environment for robotics simulation devices are comfortable enough to use and for modeling.
The purpose of the master's work is to study the possibility of using the new artificial intelligence algorithms and algorithms of search paths in the process of building robots work.
Achieving stated goals connected with the following tasks:
- Adapting search algorithms shortest paths for robots;
- Create a model of the robot and provide an interface for its control;
- Application of the results obtained in the simulation process in one of the media devices to simulate robotics.
References
- Прейко М., Устройства управления роботами: схемотехника и программирование – М.: Издательство ДМК, 2004, 202с.
- Лаврущенко О.М., Шевченко В.Ю., Система вiзуальної орiєнтацiї мобільного роботу пiд керуванням RTAI/Debian //Материалы международной научно-технической конференции гидротехнологии, навигации, управления движением и конструирования авиационно-космической техники [Электронный ресурс]. – Режим доступа: ftp://ftp.linux.kiev.ua/pub/conference/2007/reports/rtai.pdf
- Мащенко, С.В., Шинкарьов, И.В., Маневрений робот "Інтелект-9" // Штучний інтелект. 2000, ДонНТУ, ИПИИ «Наука і освіта» [Электронный ресурс]. – Режим доступа: http://ea.donntu.ru:8080/jspui/...
- Kopicki М., Prediction learning in robotic manipulation. A Thesis Subnitted to The University of Birmingham for the degree of Doctor Of Philosophy. –Computer Science. The University of Birmingham. April 2010 [Электронный ресурс]. – Режим доступа: http://www.cs.bham.ac.uk/~msk/pub/thesis.pdf
- Мельник А.А., Хоменко В.Н., Пліс П.С., Енафф П., Борисенко В.Ф., Кинематическая модель робота с шестью степенями свободы и возможностью учета зазора в суставах // Наукові праці Донецького національного технічного університету, – №10 (180), 2011. – [Электронный ресурс]. – ea.donntu.ru/...
- Рябченко В.В., Дацун Н.Н., Использование моделирующей среды для создания программного обеспечения программно-аппаратного комплекса управления роботом-манипулятором семейства Katana фирмы Neuronics AG // Наукові праці Донецького національного технічного університету, серія Інформатика, кібернетика та обчислювальна техніка, вып. 14 (188), Донецк, ДонНТУ, 2011. – [Электронный ресурс]. – ea.donntu.ru/...
- Kopicki S., European Master in Advanced Robotics. –The University of Birmingham. March 2009.
- Festo Didactic // Festo Inc, [Электронный ресурс]. – Режим доступа: http://www.festo-didactic.com/int-en/...
- Book of exercises. Festo Didactic GmbH & Co KG 2007, 29 p.
- Курченков Н.И., Дацун Н.Н., Модификация алгоритма поиска путей Jump Point Search для робота Robotino // Інформаційні управляючі системи та комп’ютерний моніторинг (ІУС та КМ-2014) / Матерiали IV мiжнародної науково-технiчної конференцiї студентiв, аспiрантiв та молодих вчених. – Донецьк, ДонНТУ – 2014, Том 1, с. 231-236.
- Гаврилов Г.П., Сапоженко А.А., Задачи и упражнения по курсу дискретной математики, – М.: Наука, 2007. – 408с.
- Гончарова Г.А., Мочалін А.А. Элементы дискретной математики: учеб. Пособие – М.: Форум: ИНФРА-М, 2007.
- Іванов Б.Н., Дискретная математика. Алгоритмы и программы. Расширенный курс – М: Известия, 2011. – 512 с.
- Алгоритм поиска пути Jump Point Search [Электронный ресурс]. – Режим доступа: http://habrahabr.ru/post/162915/
- Haykin S. «Neиral networks expand SP's horizons», ШЕЕ Signal Processing Magazine, 1996B, vоl. 13, 622 р.
- Круглов В.В., Борисов В.В., Искусственные нейронные сети. Теория и практика – М.: Телеком – 2002. – 388 с.
- Осовський С., Нейронные сети для обработки информации – М.: Финансы и статистика, 2002. – 344 с.
- Поспелова Д.А., Штучний інтелект [У 3-х кн.]. – Кн. 2. Моделі и методи – М.: Радіо и св`язок, 1990. – 304 с.
- Спірін О.С., Початки штучного інтелекту: Навчальний посібник для студ. Фіз.-мат. спеціальностей вищих пед. навч. закладів – Житомир: – Видавництво ЖДУ, 2004, – 172 с.