
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження, наукова новизна
- 3. Огляд досліджень та розробок
- 4. Метод оцінки відношення сигнал/шум
- 5. Пристрій для реалізації методу
- Висновки
- Перелік посилань
Вступ
Сигнал – це інформаційна функція, що містить повідомлення про фізичні властивості, стан або поведінку будь-якої фізичної системи, об’єкта або середовища. Метою обробки сигналів можна вважати отримання певних інформаційних відомостей, які відображені в цих сигналах і перетворення цих даних у форму, зручну для сприйняття і подальшого використання [1]. Найбільш поширеним типом сигналу є електричний сигнал, тобто сигнал, в якому носієм корисної інформації є струм або напруга, які змінюються у часі.
При детектуванні сигналів, несучих цільову для даного виду вимірювань інформацію, в сумі з основним сигналом одночасно реєструються і заважають сигнали, шуми і перешкоди найрізноманітнішої природи. До перешкод відносять також спотворення корисних сигналів при впливі різних дестабілізуючих факторів на процеси вимірювань, як, наприклад, грозових розрядів на електророзвідувальні методи вимірювань тощо [2]. Виділення корисних складових з загальної суми зареєстрованих сигналів або максимальне зниження шумів і перешкод в інформаційному сигналі при збереженні його корисних складових є однією з основних задач радіотехніки.
Шум завжди присутній в електронних схемах. Його чутно в радіоприймачі між станціями і при прийомі слабкого сигналу. Фізично шум являє собою випадкові флуктуації напруги, які можна чути як шипіння в гучномовці. Саме за електричним шумом встановлюється найнижчій діапазон вимірювань в електронних приладах; шум обмежує реальну чутливість радіоприймача. Будучи явищем випадковим, шум не зосереджений на одній частоті, проте існує у всіх частинах спектру. І справді: потужність шуму, породжуваного схемою, зазвичай пропорційна ширині її смуги.
Часто заходом розрізнення
корисного сигналу на фоні шуму у тій чи іншій системі служить відношення сигнал/шум [3].
Відношення сигнал/шум (ВСШ) – безрозмірна величина, що показує відношення потужності корисного сигналу до потужності шуму. Зазвичай
відношення сигнал/шум виражається в децибелах (дБ). Чим більше це відношення, тим менше шум впливає на характеристики системи, тим якісніше і
чистіше
звук, відео або сигнал на виході.
Основні причини високого рівня шуму в сигнальних системах:
- Неузгоджені лінії передачі сигналу (неідеальність електронних компонентів);
- Тепловий шум в електронних компонентах системи;
- Недостатня розрядність аналого-цифрового перетворювача (АЦП) (у системах з цифровою обробкою сигналу, тобто практично у всіх сучасних);
- Резонансні явища;
- Паразитний зв’язок;
- Самозбудження системи;
- Нелінійність передавальних характеристик.
1. Актуальність теми
У радіотехнічних системах різного призначення (радіолокаційні, радіонавігаційні, системи зв’язку, інформаційно-вимірювальні системи) актуальним є завдання оцінки відношення сигнал/шум у прийнятому радіосигналі. Існуючі методи оцінки вимагають попереднього знання смуги частот, зайнятої прийнятим сигналом або введення до сигналу, що передається, спеціальних додаткових сигналів. У поданій магістерській роботі розглянуто метод оцінки відношення сигнал/шум для сигналів з безперервною несучою, вільний від вказаних недоліків.
2. Мета і задачі дослідження, наукова новизна
Метою магістерської роботи є дослідження методів оцінки відношення сигнал/шум у прийнятих радіосигналах.
Основні завдання дослідження:
- Аналіз існуючих методів оцінки відношення сигнал/шум;
- Розробка методу оцінки відношення сигнал/шум, інваріантного до ширини спектру сигналу;
- Розробка та моделювання пристрою, за допомогою якого можливо реалізувати розроблюваний метод;
- Аналіз отриманих результатів.
У магістерській роботі буде запропонований принципово новий метод оцінки відношення сигнал/шум.
3. Огляд досліджень та розробок
Завдання вимірювання відношення сигнал/шум не є новим. Інтенсивно розвивалося у 80–90 рр. минулого століття. У [4] запропонований спосіб вимірювання відношення сигнал/шум, що включає вузькосмугову фільтрацію суміші сигналу і шуму та її подальшу обробку. При цьому обробку суміші сигналу і шуму здійснюють шляхом перемикання фази високочастотної складової суміші сигналу і шуму на при кожному досягненні обвідної суміші сигналу і шуму нуля. Далі проводять виділення позасмугових складових у спектрі обробленого сигналу і у відношенні потужності позасмугових складових до загальної потужності сигналу визначають відношення сигнал/шум. Недоліком способу є необхідність попередньої оцінки ширини спектру сигналу (смуги частот, зайнятої сигналом), що істотно збільшує час оцінки відношення сигнал/шум, тому знижує швидкодію.
У [5] запропонований спосіб вимірювання відношення сигнал/шум, згідно з яким суміш сигналу і шуму перетворюють за допомогою нелінійного елементу з квадратичною характеристикою, що здійснюють вимірювання значень спектральної щільності потужності процесу на виході нелінійного елемента у двох частотних діапазонах, межею поділу яких є половинне значення ширини спектра шуму (сигналу), обчислюють функцію від цих величин, за якою судять про шукану величину.
Недоліками способу вимірювання відношення сигнал/шум є низька швидкодія через наявність двох паралельно включених смугових фільтрів для яких потрібне попереднє визначення смуги пропускання, на що витрачається додатковий час.
У [6] запропонований інший спосіб вимірювання відношення сигнал/шум шляхом частотної селекції прийнятої суміші сигналу і шуму, нормування її за рівнем, формування з неї двох сум сигналу з шумом, із залежними сигнальними складовими, перемножування одержаних сум усереднення результату множення, дві суми сигналу з шумом формують у вигляді некорельованих квадратурних складових суміші сигналу з шумом, повертають їх по фазі у відношенні один до одного на 90°.
4. Метод оцінки відношення сигнал/шум
Прийом корисних сигналів із безперервною несучою супроводжується шумами. При цьому, якщо розглянути миттєву частоту такої суми корисного сигналу і шуму, то можна зазначити, що є дві складові: невеликі флуктуації і короткі викиди великої амплітуди [7].
Для полегшення розуміння даного процесу припустимо, що несуча сигналу немодульована. Її можна представити як обертовий вектор із фазою Θ(t) і довжиною Um(t), що дорівнює амплітуді. Частота сигналу є просто кутова швидкість обертання цього вектора.
Вектор шуму складається із сигнальним вектором, як показано на рис. 1, а. Оскільки сигнальний вектор обертається з постійною швидкістю, для зручності подання можна просто відображати відносне обертання результуючого вектора щодо сигнального вектора (рис. 1, б).
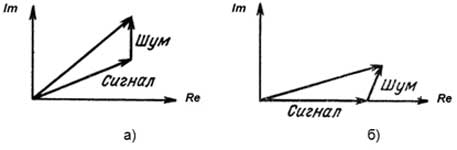
Рисунок 1. а) – векторне подання суми сигналу і шуму; б) – відносне векторне подання суми сигналу та шуму з урахуванням частоти несучої
Коли вектор шуму малий, як показано на рис. 2, а, він викликає незначні флуктуації миттєвої частоти, як показано на рис. 2, б.
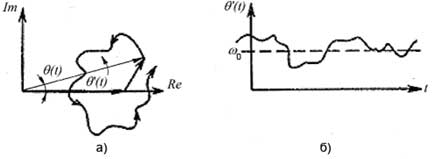
Рисунок 2. а) – годограф вектора суми гармонічного сигналу і шуму, коли вектор шуму малий у порівнянні з сигнальним вектором; б) – частота суми гармонічного сигналу та шуму
Якщо вектор шуму великий, то результуючий вектор прийнятої суміші сигналу і шуму описує своїм кінцем траєкторію навколо початку координат (рис. 3, а). Це викликає фазову помилку величиною 2π (перескок на один період або цикл). Якщо такий рух відбувається швидко, то його можна приблизно вважати стрибком фази, який веде до появи короткочасного імпульсу миттєвої частоти великої амплітуди, як показано на рис. 3, б.
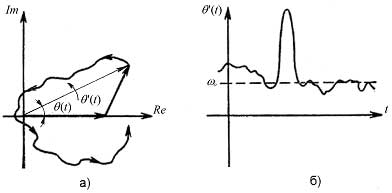
Рисунок 3. а) – годограф вектора суми гармонічного сигналу і шуму, коли вектор шуму великий порівняно із сигнальним вектором; б) – частота суми гармонічного сигналу та шуму
Це явище називається аномальною помилкою [7]. При цьому миттєва частота такої суми подається імпульсною послідовністю, обумовленою тим, що кінець результуючого вектора описує траєкторії навколо початку координат, і флуктуаційного шуму, який можна досліджувати методами лінійного аналізу. Компонента перескоків фази володіє рівномірним спектром із щільністю (2π)2fs, де fs – математичне очікування числа перескоків за секунду (середня інтенсивність перескоків), визначається за формулою:
 (1)
(1)
У цьому виразі: p – відношення сигнал/шум на виході фільтра ПЧ, erfc() – додаткова функція помилки, яка визначається виразом:
 (2)
(2)
R – радіус гірації фільтра ПЧ:
 (3)
(3)
У виразі (3) f0 – несуча частота, H – передатна характеристика фільтра [7].
Беручи передатну характеристику фільтра ПЧ рівномірною в межах [ f0 – Δf/2; f0 + Δf/2], з (3) отримаємо наступний результат для радіуса гірації:

Якщо підставити це значення в (1), отримаємо:
 (4)
(4)
З останнього виразу видно, що число аномальних помилок залежить від смуги частот зайнятої сигналом, тому представляє інтерес розробка методу оцінки відносної частоти появи аномальних помилок, інваріантних до смуги частот.
Визначимо середнє число максимумів N1max випадкової частоти суми сигналу і шуму (рис. 2, б), вважаючи спектральну щільність шуму рівномірної у смузі частот Δf з рівномірним розподілом фази в межах від –π до π. Неважко помітити, що спектральна щільність флуктуацій фази суми гармонійного сигналу і шуму буде також прямокутною, але її смуга буде складати Δf/2.
У [8] визначено співвідношення для середнього числа максимумів для флуктуацій фази квазігармонійного процесу як:
 (5)
(5)
де r0 – кореляційна функція процесу r(τ) за умови τ = 0; r0″ і r0(4) – похідні r(τ) за умови τ = 0 другого і четвертого порядку відповідно.
Враховуючи причинно-наслідковий зв’язок, очевидно, що середнє число екстремумів для флуктуацій фази і частоти буде збігатися, оскільки частота є похідною фази.
Прийнявши, що функція зміни частоти (рис. 2, б) має рівномірний спектр у смузі частот від 0 до 2π, її кореляційну функцію можна представити у вигляді:

Знайшовши похідні і підставивши до (5) отримаємо:

Розділивши (4) на отримане співвідношення, отримаємо вираз, що є інваріантний до ширини спектру аналізованого сигналу:

Отже, відношення сигнал/шум буде визначатися за формулою:
 , (6)
, (6)
де erfc–1() – зворотня додаткова функція помилки
Графік цієї залежності представлений на рис. 4.
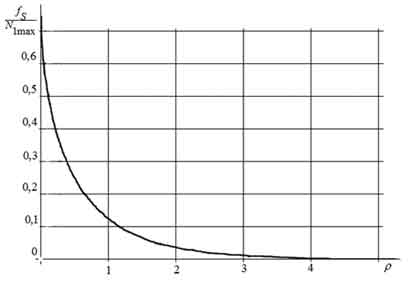
Рисунок 4. Графік залежності відношення числа аномальних помилок до середнього числа максимумів флуктуації частоти від відношення сигнал/шум
5. Пристрій для реалізації методу
Приклад реалізації цього способу ілюструється на рис. 5, де блок 1 – вузькосмуговий фільтр, блок 2 – частотний детектор, блок 3 – показник екстремумів, блок 4 – лічильник екстремумів, блок 5 – диференціальний ланцюг, блок 6 – амплітудний селектор, блок 7 – лічильник аномальних викидів, блок 8 – вирішальний пристрій.
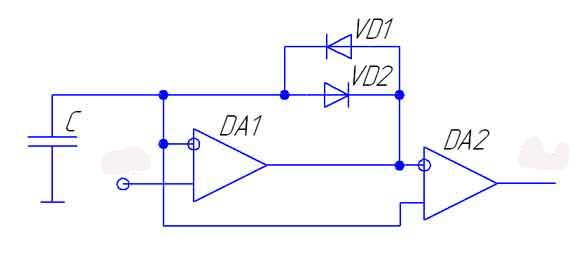
Рисунок 5. Структурна схема пристрою для визначення відношення сигнал/шум
Після попередньої фільтрації і частотного детектування суми сигналу і шуму, що здійснюються в блоках 1 і 2 відповідно, роблять виділення екстремальних значень і коротких викидів великої амплітуди (аномальних викидів) за допомогою блоків 3, 5 і 6 відповідно. Далі за допомогою блоків 4 і 7 підраховується число екстремумів і аномальних викидів. Вирішальний пристрій (блок 8) зчитує вміст лічильника аномальних викидів при заданому значенні лічильника екстремумів і виконує перетворення числа відповідно до формули (6).
Показник екстремумів реалізується схемою, представленою на рис. 6, де DA1 – операційний підсилювач (ОП), DA2 – компаратор. Його робота пояснюється часовими діаграмами, наведеними на рис. 7, де 9 – вхідний сигнал; 10 – сигнал на виході ОП; 11 – сигнал на виході компаратора.
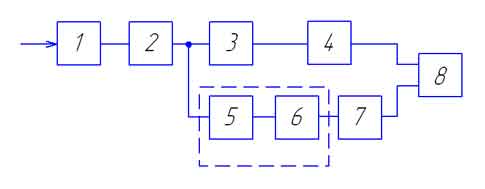
Рисунок 6. Схема покажчика екстремумів
При збільшенні вхідного сигналу, сигнал на виході ОП також збільшується, причому його рівень більше рівня вхідного сигналу на величину граничного значення напруги на діоді VD1. За умови зменшення рівня вхідного сигналу, сигнал на виході ОУ також зменшується, причому його рівень менше рівня вхідного сигналу на величину граничного значення напруги на діоді VD2.
Рисунок 7. Часові діаграми, що пояснюють роботу покажчика екстремуму
(анімація: 10 кадрів, 7 циклів повторення, 136 кілобайт)
(9 – вхідний сигнал, 10 – сигнал на виході ОП, 11 – сигнал на виході компаратора)
Отже, між вхідним сигналом і сигналом на виході ОП завжди існує різниця, яка дорівнює граничної напрузі відкриття діодів VD1 і VD2, причому, якщо вхідний сигнал збільшується, ця різниця має позитивний знак, якщо зменшується – негативний знак. Зміна знаку різниці напруг відбувається в момент зміни знака похідної сигналу (коли похідна змінюється на нуль).
Ця різниця виділяється за допомогою компаратора.
Висновки
Отже, запропонований метод оцінки відношення сигнал/шум, заснований на знаходженні відношення частоти появи аномальних помилок (короткочасних імпульсів миттєвої частоти великої амплітуди) до загального числа екстремумів (викидів) частоти сигналу, є інваріантним до смуги частот, зайнятої прийнятим сигналом. Він не вимагає попередньої оцінки смуги частот, зайнятої прийнятим сигналом, що у кінцевому підсумку призводить до зменшення часу, необхідного для оцінки відношення сигнал/шум.
Магістерська робота присвячена розробці і дослідженню методу оцінки відношення сигнал/шум, що значно підвищує швидкодію системи. В межах проведених досліджень виконано:
- На підставі аналізу літературних джерел наведено основні методи оцінки відношення сигнал/шум у радіосигналі, що приймається;
- Запропоновано принципово новий метод оцінки відношення сигнал/шум, проаналізовано отримані результати;
- Розглянуто один із можливих способів реалізації пристрою для вимірювання відношення сигнал/шум і принцип його роботи.
Подальші дослідження спрямовані на наступні аспекти:
- Вдосконалення запропонованого методу оцінки відношення сигнал/шум;
- Моделювання пристрою для вимірювання відношення сигнал/шум у середовищі LabVIEW;
- Аналіз результатів моделювання.
При написанні цього реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2014 року. Повний текст роботи та матеріали з теми можна отримати у автора або його керівника після вказаної дати.
Перелік посилань
- Баскаков, С. И. Радиотехнические цепи и сигналы / С. И. Баскаков. – [3-е изд.]. – М.: Высшая школа, 2000. – 462 с.: ил.
- Харкевич, А. А. Борьба с помехами / А. А. Харкевич. – [2-е изд.]. – М.: Наука, 1965. – 275 с.: ил.
- Джонс, М. Х. Электроника – практический курс / М. Х. Джонс; пер. с англ. Е. В. Воронова, А. Л. Ларина. – М.: Постмаркет, 1999. – 528 с.: ил.
- Пат. 2354981 Российская Федерация, МПК G 01 R 29/26. Способ измерения малых отношений сигнал/шум и устройство для его осуществления / Ильин А. Г., Насретдинов М. А.; заявитель и патентообладатель Государственное образовательное учреждение высшего профессионального образования Казанский государственный технический университет им. А. Н. Туполева. – № 2007131947/28 ; заявл. 21.08.2007 ; опубл. 10.05.2009, Бюл. № 13. – 9 с.: ил.
- А. с. 1529148 СССР, МПК G 01 R 29/26. Способ измерения отношения сигнал/шум и устройство для его осуществления / Ваккер Р. А., Дорогов О. Н. (СССР). – № 4388103/24–21 ; заявл. 04.03.1988 ; опубл. 15.12.1989, Бюл. № 46. – 7 с.: ил.
- А. с. 1441334 СССР, МПК G 01 R 29/26. Способ измерения отношения сигнал/шум / Кириллов А. А. (СССР). – № 4170602/24–21 ; заявл. 30.12.1986 ; опубл. 30.11.1988, Бюл. № 44. – 4 с.: ил.
- Ван Трис, Г. Теория обнаружения, оценок и модуляции. В 3 т. Теория нелинейной модуляции Т. 2 / Г. Ван Трис; пер. с англ. В. Т. Горяинов. – М.: Советское радио, 1975. – 344 с.: ил.
- Тихонов, В. И. Выбросы траекторий случайных процессов / В. И. Тихонов, В. И. Хименко. – М.: Наука, 1987. – 304 с.: ил.
- Пат. 86834 Украина, МПК G 01 R 29/26. Спосіб вимірювання відношення сигнал/шум / Алаєв О. М., Атаров М. О.; заявник и патентовласник Державний вищий навчальний заклад Донецький національний технічний університет. – № u201309268, заявл. 23.07.2013; опубл. 10.01.2014, Бюл. № 1
- Алаев, А. Н. Метод оценки качества сигнала с непрерывной несущей / А. Н. Алаев, Н. А. Атаров // Современный научный вестник. – 2013. – № 50 (189). – С. 94–98
- Алаев, А. Н. Метод измерения отношения сигнал/шум / А. Н. Алаев, Н. А. Атаров // Современные проблемы радиотехники и телекоммуникаций РТ-2014: материалы 10-й Международной молодежной научно–технической конференции. – 2014. – С. 55–56
- Патюков, В. Г. Оценка отношения сигнал/шум на основе фазовых флуктуаций сигнала / В. Г. Патюков, Е. В. Патюков, А. А. Силантьев // Журнал радиоэлектроники [Электронный ресурс]. – Режим доступа: http://jre.cplire.ru