Мониторинг деформаций земной поверхности, зданий и сооружений спутниковыми системами
Авторы: Спиридонов В.П. , Бирюков Г.Н.
Источник: Кафедра горно-нефтяного факультета МГОУ им. В.С.Черномырдина "Маркшейдерское дело и геодезия"
Авторы: Спиридонов В.П. , Бирюков Г.Н.
Источник: Кафедра горно-нефтяного факультета МГОУ им. В.С.Черномырдина "Маркшейдерское дело и геодезия"
Современный уровень развития науки и техники позволил создать за последние десятилетия принципиально новый, спутниковый, метод определения координат и их приращений, используя измерения параметров движения объекта по излучаемому сигналу и нахождения координат приемника по измеренному доплеровскому сдвигу сигнала, излучаемому спутником, если его параметры движения и координаты известны.
Впервые возможность определения параметров движения искусственного спутника земли по результатам измерений доплеровского сдвига частоты сигнала, излучаемого этим спутником, была экспериментально подтверждена в 1957 году группой советских ученых под руководством В.А.Котельникова.
В 1958 году в США уже начала разрабатываться спутниковая радионавигационная система первого поколения NNSS (Navy Navigation Satellite System), впоследствии получившая наименование «Транзит» (Transit) для навигационного обеспечения пуска с подводных лодок баллистических ракет Поларис. Для коммерческой эксплуатации спутниковая навигационная система «Transit» была предоставлена в 1967 году, причем количество гражданских пользователей вскоре существенно превысило число военных, позволяя с помощью малогабаритных приемников GEOCEIVER определять координаты с субметровой точностью. В 2000 году система была выведена из эксплуатации.
С запуском в СССР первого навигационного спутника «Космос-192» в 1967 году началось летоисчисление спутниковой навигационной системы «Цикада». Полностью система введена в эксплуатацию в 1979 году в составе четырех космических аппаратов, выведенных на круговые орбиты высотой 1000 км, наклонением 83 градуса и равномерным распределением плоскостей орбиты вдоль экватора. С течением времени в результате модернизации системы среднеквадратической погрешности определения места объекта достигла 80-100 м. В настоящее время «Цикада» имеет ограниченное применение в навигации.
Поколение первых навигационных систем обладали рядом существенных недостатков – недостаточная точность определения координат динамических объектов и отсутствие непрерывности в измерениях. Настоящую революцию в спутниковой навигации и геодезии произвели среднеорбитальные спутниковые системы следующего поколения – NAVSTAR GPS (NAVigation System with Time And Ranging Global Positioning System – навигационная система определения расстояний и времени, глобальная система позиционирования), разработанная в США, и ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система), разработанная в СССР.
С разработкой в 1960 году атомных часов стало возможным использовать для навигации сеть точно синхронизированных передатчиков кодированных сигналов. В 1964 году ВВС США начали разработку и испытания возможности использования для местоопределения широкополосных сигналов, модулированных псевдослучайными шумовыми кодами. Существовавшие программы ВМФ и ВВС США по разработке спутниковых систем нового поколения в 1973 году были объединены в одну технологическую программу «NAVSTAR GPS». В 1978 году начат вывод спутников системы на орбиту. К 1996 году развертывание системы было завершено, хотя еще до этого спутниковая навигация широко применялась как на транспорте и в быту, так и военными.
Летные испытания отечественной спутниковой навигационной системы ГЛОНАСС были начаты в октябре 1982 года запуском спутника «Космос-1413». В 1995 году было завершено развертывание ГЛОНАСС до ее штатного состава – 24 космических аппарата. ГЛОНАСС является системой двойного назначения (военного и гражданского). Россия предоставляет систему в штатном режиме для гражданского, коммерческого и научного использования без взимания за это специальной платы. Это справедливо и для GPS – США также предоставляют ее без взимания платы. К сожалению, российские космические аппараты обладали меньшим временем функционирования на орбите, чем американские, поэтому в условиях слабого финансирования парк спутников системы ГЛОНАСС сократился до 15 единиц, притом, что минимально необходимое количество спутников на орбите для надежного определения места объектов составляет 18. К 2007 году планируется довести космическую группировку спутников ГЛОНАСС до минимально необходимого количества, а к 2012 году до полного состава.
Свою навигационную спутниковую систему создает и Европа. Так летом 2002 года Европейский Союз принял окончательное решение о создании европейской спутниковой системы Галилео (Galileo). Предполагается, что она должна быть: независимой от GPS, но взаимодействующей с ней; управляемой под международным контролем; более точной и доступной, способной быстро обнаруживать и оповещать о неисправности элементов системы; рентабельной; открытой для участия других партнеров. Начало эксплуатации системы ожидается в 2008 году. Галилео включает следующие сегменты: космический, региональный, локальный и сегмент потребителей. Группировка Галилео должна состоять из 30 космических аппаратов, находящихся на трех круговых орбитах с наклонением 56 градусов и высотой 23616 км, по 9 аппаратов на орбиту плюс один резервный на каждой. Предполагается, что Галилео дополнительно будет включать функции обмена данными, что позволит использовать ее для нужд поиска и спасения при взаимодействии с системой Коспас-Сарсат, управления движением в реальном времени и других задач. Однако первая часть проекта, входящая в региональный сегмент системы, - EGNOS самостоятельной не является и использует сигналы GPS и российской ГЛОНАСС.
Глобальная спутниковая навигационная система представляет огромное значение для различных областей деятельности человека: навигация в авиации, мореплавании и автомобильном транспорте, для геодезических работ различного назначения, в строительстве, мониторинге массивов горных пород и деформаций объектов.
Вследствие воздействия природной среды на человечество, к природным катаклизмам прибавились чрезвычайные ситуации, техногенные катастрофы и экологические бедствия, с тяжелыми и опасными для жизни людей последствиями.
Горные породы, слагающие Земную кору, под влиянием глубинных и внешних воздействий изменяют свои свойства, геометрию рельефа поверхности. Землетрясения, разливы рек, оползни, сели и провалы сопровождаются человеческими жертвами, разрушениями жилых и производственных зданий и сооружений. Особенно чувствительны к различным воздействиям и деформациям сложные гидротехнические объекты (плотины, шлюзы, дамбы, мосты), подземные сооружения различного назначения (шахты, тоннели, стволы шахт, скважины, ускорители, захоронения отходов), высотные сооружения (копры, башни, трубы и вышки).
Высокая концентрация людей, зданий и сооружений, инфраструктуры городов, промышленных объектов порождает огромную нагрузку на геологическую среду, вызывая ее изменение и преобразование. В свою очередь геологическая среда «реагирует» на внешние воздействия, что негативно сказывается на состоянии зданий и сооружений и другой инфраструктуры. Наиболее распространенным видом воздействия является статические нагрузки на толщу пород от веса зданий и сооружений. Под постоянным давлением сооружения грунты в основании фундамента сжимаются, и происходит осадка фундамента. Неравномерная осадка приводит к перекосам и прогибам оснований, наклонам (кренам) верхней части сооружений. При значительной величине осадки в фундаменте и стенах зданий появляются трещины и обрушения (рис. 1).
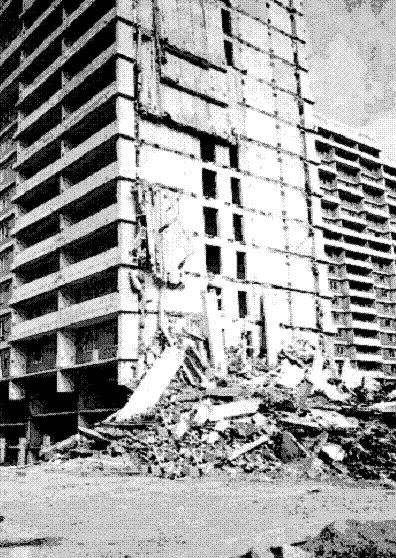
Рисунок 1 – Трещины и обрушения в фундаменте и стенах здания
Мощным фактором воздействия на геологическую среду городов и больших мегаполисов является строительство подземных сооружений. Возведение и эксплуатация подземных объектов ведется в условиях интенсивного водоотлива от строящихся сооружений, вызывающего снижение гидростатических напоров и статических уровней горизонтов подземных вод. Таким примером является событие, произошедшее в Москве на Ленинградском проспекте в сентябре 2006 года.
Анализ чрезвычайных ситуаций в строительстве показал, что сооружения во время своей эксплуатации постоянно находятся в колебательном режиме под действием вибрации, т.к. испытывают нагрузки от сезонных смещений массива горных пород, изменения гидрологического режима и от рядом стоящих объектов различного назначения.[1] Это наложило определенный отпечаток на методы контроля, точность и расчет параметров сдвижения и деформации массива горных пород, зданий и сооружений, так как массив горных пород является отдельной системой (С-1) и объектом контроля со своими параметрами, гостами и критериями устойчивости, а здания и сооружения другой системой (С-2). Их параметры могут быть, как общими для этих систем, так и индивидуальными. Существует много средств и методов проведения диагностики деформации земной поверхности и различных сооружений. Амплитуда колебаний (смещений) различных сооружений может быть в пределах от долей мм до нескольких метров, а частота от 0,1 Гц до десятков недель. Поэтому критерием устойчивости к смещениям различного рода сооружений можно считать положение центра колебаний и допустимые амплитуду, частоту (длину волны) колебаний деформационных процессов проходящих в них, т.е. образуется случайное поле – параметры которого представляют различные множества.
Поэтому системы контроля С-1 и С-2 следует объединить в одну, общую систему. Точкой отсчета, для последующей оценки при мониторинге горнопромышленных сооружений и зданий, необходимо считать – данные контроля состояния колебаний объекта при его приеме в эксплуатацию. При единой системе контроля, мониторинг положения фундаментов зданий, сооружений и отдельных элементов позволит своевременно прогнозировать их напряженно-деформированное состояние и принять необходимые меры по обеспечению функционирования этих объектов [2].
Глобальная спутниковая навигация принципиально изменяет традиционную технологию геодезических работ. По сравнению с последней она имеет следующие преимущества:
Мониторинг деформаций инженерных сооружений (мостов, платин, башен и т.д.) с применением спутниковых технологий становиться обычным явлением. Мост Цинь Ма в Гонконге (рис.2.) известен как самый длинный мост в мире (длина 1377 м.) Мост несет автомобильную и железную дороги. При разных видах нагрузки мост испытывает деформации от нескольких сантиметров до нескольких метров влияющих на целостность конструкции. Рядом с ним построены еще два подвесных моста: Тинь Кау ( 1177 м.) и Кап Шуи Мун ( 820 м.).

Рисунок 2 – Местоположение GPS-приемника на мосту Цинь Ма
Разработанная Департаментом автодорог Гонконга инструментальная система наблюдения в реальном времени за конструкциями с помощью GPS состоит из пяти подсистем: самих GPS приемников, систем сбора локальных и глобальных данных, системы компьютеров и оптико-волоконной сети, позволяющих более точно и надежно осуществлять мониторинг и оценку структурных изменений и состояния основных компонентов подвесных мостов с тросовыми растяжками и применять полученные результаты для планирования, проведения технических осмотров и технического обслуживания. В сеть GPS приемников входит две базовые станции и 27 (14+7+6) приемников, жестко установленных на различных точках конструкций трех мостов. Приемники двухчастотные, 24-канальные, темп сбора (частота фиксации) данных 10 Герц (10 раз в секунду), время латенции положения подвижной антенны 0,03 с. Обработка всей информации системы занимает 2 с. Фирма «Leica Geosystems AG» (Heerbrugg, Швейцария) предоставила приемники серии MC500 в качестве мобильных и базовых станций в системе GPS-OSIS, с антеннами типа «choke-ring» Leica AT504 на базовых станциях. В системе также использовалось пользовательское программное обеспечение для обработки GPS-данных фирмы «Leica Geosystems», оптоволоконные мультиплексоры TC1885 и TC8108 фирмы Nova Electronics, и две рабочие станции фирмы «Silicon Graphics» 540 [3].
1. Гудков В.М., Спиридонов В.П. Критерии устойчивости горнопромышленных сооружений и зданий. Маркшейдерский вестник. № 2, 2004 г., с. 68–71.
2. Спиридонов В.П. Деформации горных пород и сооружений, предупреждение чрезвычайных ситуаций. Журнал «Горная механика», № 1-2, 2004, с. 28-34 (Минск).
3. Kai-yuen Wong, King-leung Man, Wai-yee Chan «Мониторинг деформации мостов в Гонконге посредством метода кинематики в реальном времени»