Рисунок 1 – Схема сети
by Lambert Wanninger
Перевод с английского – Шатохина К.А.
Introduction to Network RTK
Сантиметровый уровень точности позиционирования в реальном времени на основе измерений GPS (или в более общем измерений GNSS) был разработан в середине 1990-х, в наши дни данный метод носит название РТК ("кинематика в реальном времени"). Она включает в себя опорный приемник, передающий свои сырые измерения или корректировки наблюдения к подвижному приемнику через какой-то канал связи данных (например: радио, сотовый телефон). Обработка данных с ровера включает в себя разрешение неоднозначности данных разностей фазы несущей и координировать позицию ровера.
Один существенный недостаток этого подхода заключается в том, что максимальное расстояние между базой и передвижным приемником не должно превышать от 10 до 20 километров, с тем, чтобы иметь возможность быстро и надежно решить фазовую неопределенность. Это ограничение связанное с расстоянием зависит от различных факторов, таких как ошибки орбиты, ионосферная и тропосферная рефракции сигнала. Эти ошибки, однако, могут быть точно смоделированы с использованием измерений массива опорных станций ГНСС, окружающих спутниковый приемник.
Успех RTK позиционирования в последние годы привел к созданию RTK услуг, которые поставляют справочные данные для всех, кто готов заплатить за них. В целях обеспечения такой сервис в больших регионах или для всей страны – многие опорные станции должны быть созданы и поддерживаться специальными предприятиями. Здесь, развитие сети RTK привела к огромному снижению капитальных затрат необходимых для запуска услуги позиционирования RTK, так как количество базовых станций может быть уменьшено от около 30 базовых станций на 10000 квадратных километров до 10 опорные станции на 10000 квадратных километров для сети RTK.
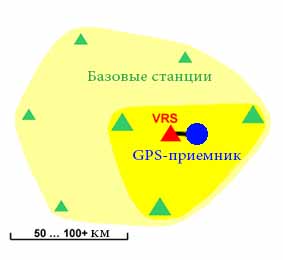
Обработки данных для сети RTK позиционирования состоит из трех шагов. На первой стадии обработки неоднозначность фиксация осуществляется в сети базовых станций (см. на рисунок 1). Все трудности вызваны ошибками наблюдений и априорная информация, которая способна уменьшить эти ошибки – должны быть использованы: ионосферная и тропосферная коррективы на основе последних результатов обработки сети, фазы несущих поправок многолучевого…
Рисунок 1 – Схема сети
На втором этапе, оцениваются коэффициенты обработки коррекции модели (см. рисунок 2). Некоторые методы, разработанные для моделирования (или интерполяции) расстояний, зависят от предубеждения между опорных станций и пользовательских приемников. Ионосферы и орбиты предубеждения должны быть смоделированы индивидуально для каждого спутника. Ионосферные модели коррекции могут быть основаны на наблюдениях для трех окружающих базовых станций. С другой стороны, качество геометрических моделей коррекции улучшится, при использовании большого числа опорных станций.
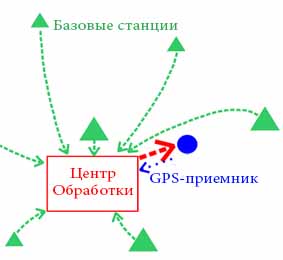
Рисунок 2 – Центр обработки измерений
В третьей стадии обработки сетевого RTK производится оптимальный набор эталонных наблюдений для выбранной мастер-станции, например, ближайшей к подвижному приемнику. На основе моделей коррекции и горизонтальной координаты различия между мастер исходного положения и приблизительного положения ровера, опорные наблюдения практически перешли приемник. Это приводит к созданию виртуальной базовой станции (VRS), которая используется подвижным приемником для определения своей позиции.
Рисунок 3 изображает четыре различных способа, как можно передать информацию о сети для пользователя. Эти подходы отличаются по распределению стадий обработки либо сетевая обработка в центре или в самом приемнике. Это влияет на информативность и форматы данных из сообщений, подлежащих передаче с подвижного приемника, а также выбор соответствующих каналов связи.

Рисунок 3 – поэтапная обработка данных
В режиме реального времени обработка опорной сети передачи данных способна обеспечить гораздо более ценную информацию, чем просто ссылаться на наблюдения для RTK позиционирования. Важным побочным продуктом является мониторинг локальных деформаций земной коры на эталонных участков. Кроме того побочные продукты получают из наблюдаемой дифференциальной тропосферной и ионосферной задержки сигнала.
В последние годы первого поколения услуги сети RTK были разработаны и были созданы в нескольких странах. Эти услуги доказали практическую осуществимость техники сети RTK и они получили широкое распространение от сообщества пользователей. Сеть RTK становится ведущим методом для точного спутникового позиционирования. Опираясь на этот опыт развитие второго поколения сети RTK систем ведется использование усовершенствованных алгоритмов и новых стандартов передачи данных. Широкий спектр текущих и ожидаемых исследований связано с сетью RTK . Темы исследований являются таковыми:
1. Иерархическая конструкция сети – вклад глобальных и региональных сетей в режиме реального времени мелкими услугами сети RTK
2. Содержание и формат сети RTK сообщений коррекции.
3. Замена поправок наблюдения (RTK) на информацию о состоянии атмосферы
4. Совершенствование алгоритмов для прогнозирования атмосферных поправок
5. Разработка показателей качества для сетевых RTK поправок: либо из расчета коррекции самой или основанных на наблюдениях дополнительных мониторингов
6. Новые системы передачи данных (например, на базе Интернета, или цифрового радиовещания)