Назад в библиотеку
Снижение энергоемкости системы хранения энергии в микросети с использованием теплового насоса. Характеристика исследования при помощи фактической машины.
S. Kawachi, J. Baba, H. Hagaiwara, E Shimoda, S. Numata, E Masada, T Nitta – Снижение энергоемкости системы хранения энергии в микросети с использованием теплового насоса. Характеристика исследования при помощи фактической машины.
Автор: S. Kawachi, J. Baba, H. Hagaiwara, E Shimoda, S. Numata, E Masada, T Nitta
Автор перевода: Божко В.И.
Источник: 14th International Power Electronics and Motion Control Conference, EPE–PEMC 2010
Аннотация
S. Kawachi, J. Baba, H. Hagaiwara, E Shimoda, S. Numata, E Masada, T Nitta Снижение энергоемкости системы хранения энергии в микросети с использованием теплового насоса. Характеристика исследования при помощи фактической машины. Установка возобновляемых источников энергии на основе генераторов, таких как фотоэлектрические элементы и ветряные турбины требует системы аккумулирования энергии (ESSs) для управления колебаний мощности. ESSs, однако, являются весьма дорогостоящими. Для того чтобы уменьшить необходимую емкость ESSs Microgrid приложений, изучено управление тепловыми насосами. В этом исследовании, основная характеристика потребляемой мощности теплового насоса измеряется экспериментально, с помощью теплового насоса чиллера, используемого в реальном здании. Предлагается и исследуется способ уменьшить энергоемкость ESS, использующий измеренную характеристику. Снижение мощности ESS, которое может быть достигнуто путем использования управления тепловым насосом и влиянием управления на температуру, было рассчитано с использованием моделирования.
I. Введение.
А. Справочная информация.
Сегодня, глобальное изменение климата является вопросом высокой важности, что требует снижения выбросов парниковых газов в срочном порядке. Тем временем преобразования энергии путем использования полупроводниковых устройств становится все более и более привлекательными за счет развития технологий силовой электроники. В таких условиях, выработка электрической энергии из возобновляемых источников с помощью фотоэлементов (PVs) и ветровых турбин (WTs) в электрической сети растет. Тем не менее, выработка энергии от этих возобновляемых источников имеет случайный и прерывистый характер. Когда эти колебания становятся существенными, то будет трудно поддерживать баланс между источником энергии и потребителем.
Компенсация колебаний мощности с использованием системы аккумулирования энергии (ESSs) является эффективным решением этой проблемы. В предыдущих исследованиях, авторы предложили способ управления системами распределенной генерации (DGs), чтобы компенсировать колебания мощности в microgrid и проверять её эффективность экспериментально с использованием реальных машин [1], [4].
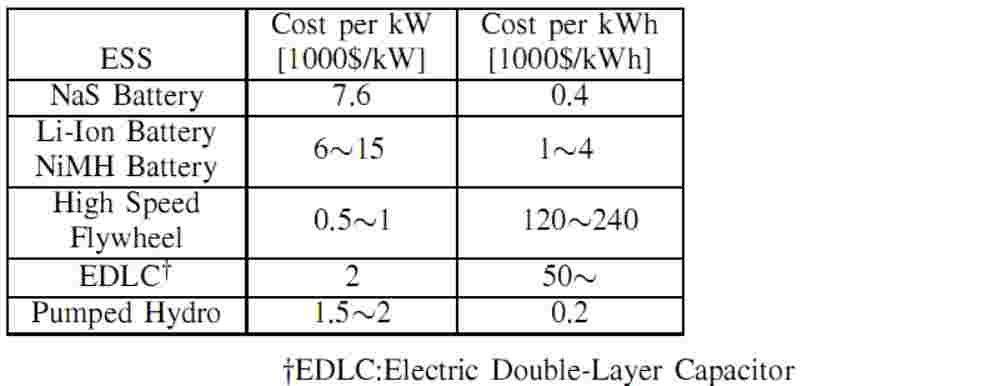
Однако предпочтительно поддерживать установленную мощность ESSs как можно меньшей, поскольку ESSs, как правило, дорогие. В таблице приведены примеры затрат нескольких ESSs на выходную мощность (кВт) и затрат на энергию (кВтч) [3]. Цифры показывают, что расходы большинства ESSs попрежнему довольно высоки.
Многие исследования были проведены для разработки путей снижения емкости ESSs. В случае ветровой турбины, управление установочным углом лопасти может уменьшить колебание мощности и тем самым снизить емкость ESSs [6]. Кроме того, у точного прогнозирования выходной мощности возобновляемого источника энергии есть возможности уменьшить ESSs.
Таблица 1 – Пример стоимости ESS's.
B. Концепция контролируемой нагрузки.
В качестве другого способа снижения емкости ESSs, который необходим для компенсации колебаний мощности, считаются управляющие электроприборы на стороне потребления. В этой статье, электрические приборы, которыми можно управлять, называются контролируемой нагрузкой
.
Существует несколько требований к электрической нагрузке, которая будет рассматриваться как идеальная регулируемая нагрузка. К ним относятся:
1) Потребляемая мощность прибора должна быть достаточно большой, чтобы управление потребляемой мощностью могло компенсировать колебания мощности.
2) Время реакции потребляемой мощности прибора на его опорный сигнал должно быть достаточно быстрым, чтобы компенсировать колебания мощности.
3) Управление потребляемой мощностью не должно создавать неудобства для пользователя прибора.
C. Тепловой насос как контролируемая нагрузка.
Среди электроприборов, тепловые насосы, которые используются для кондиционирования воздуха и нагрева воды и так далее, являются привлекательными вариантами для контроля и способными удовлетворять трем требованиям, упомянутым в предыдущем разделе [2].
Для оценки соответствия теплового насоса требованию 1) были рассмотрены количество и типы оборудования для кондиционирования воздуха, используемого в Японии. На рис. 1 и 2 показано количественное распределение оборудования для кондиционирования воздуха в жилых и коммерческих секторах соответственно. Графики показывают, что существует большой процент тепловых насосов, используемых для кондиционирования воздуха. Таким образом, регулирующая емкость в крупных масштабах для компенсации колебаний мощности может ожидаться от управления тепловыми насосами.
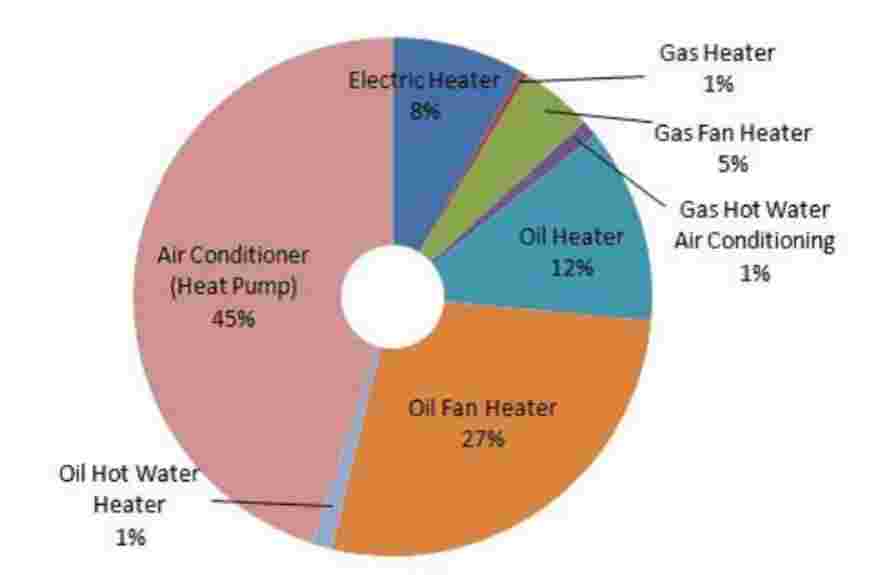
Рисунок 1 – Процент оборудования для кондиционирования воздуха в жилом секторе Японии в 2006 году.
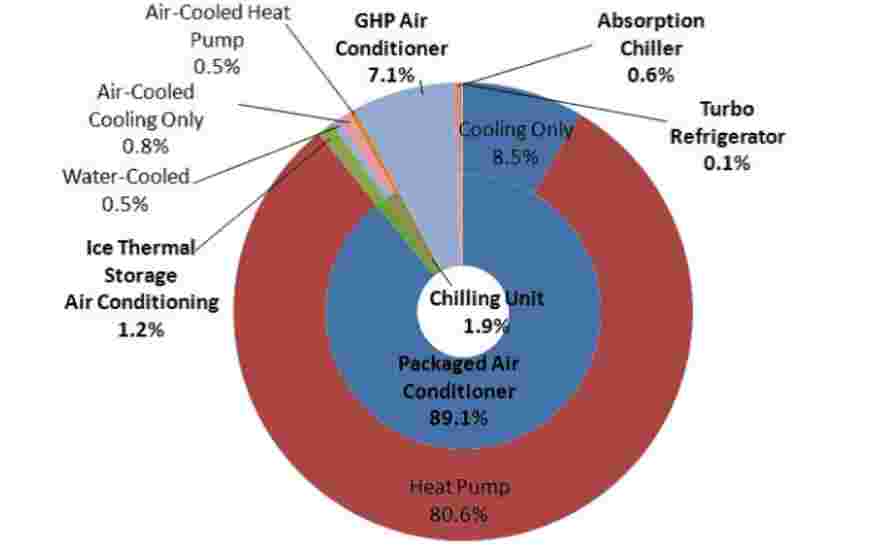
Рисунок 2 – Процент оборудования для кондиционирования воздуха в коммерческом секторе Японии в 2006 году.
Как правило, теплоемкость комнаты или воды достаточно велика. Это означает, что температура в помещении не чувствительна к выходным колебаниям мощности, вызванным управляющей нагрузкой. Другими словами, тепловую энергию, которая хранится в комнате или в воде можно рассматривать как энергетический буфер, который является достаточно большим, чтобы заменить ESSs. Таким образом, в отношении к требованию 3), управление тепловыми насосами, менее вероятно, влияет на своих пользователей по сравнению с другими устройствами, такими как осветительное оборудование или компьютеры.
По поводу требования 2), не существует каких–либо исследований, которые проверили бы амплитудно–частотные характеристики потребляемой мощности теплового насоса с использованием реальной машины. Таким образом, с помощью конкретной машины, которая доступна сегодня, в этом исследовании экспериментально измеряются амплитудно–частотные характеристики потребляемой мощности опорного сигнала и его результат сообщается в статье.
Целью данного исследования является уменьшение необходимой емкости ESSs в microgrid, чтобы компенсировать колебания мощности путем управления тепловым насосом системы кондиционирования воздуха. Первая половина этой статьи даст результаты экспериментов, проведенных с целью выяснить выходную амплитудно–частотную характеристику потребляемой мощности теплового насоса, в отношении к требованию 2) в разделе I–B. Во второй половине, будет дан результат моделирования управления microgrid, которая включает систему кондиционирования воздуха с тепловым насосом.
II. Измерение характеристики потребляемой мощности теплового насоса.
A. Аппарат и экспериментальные условия.
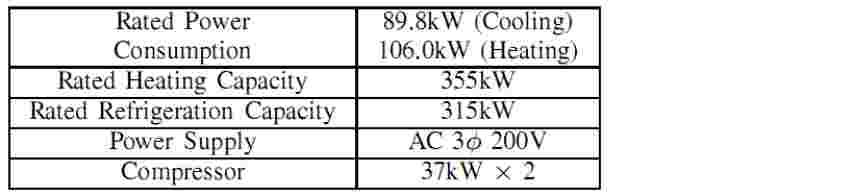
Система кондиционирования воздуха с тепловым насосом, используемая в эксперименте находится в технологическом институте корпорации Shimizu. Тот же самый тип этого теплового насоса широко используется в середине зданий. Оценки теплового насоса приведены в таблице II.
Таблица II – Оценки теплового насоса.
На рис. 3 показана схема всей системы кондиционирования воздуха. Распределение тепла в фанкойлах внутри здания осуществляется горячей водой. В тепловом насосе, есть клапан, который регулирует поток хладагента. Управление клапаном осуществляется с помощью гидравлической системы. Тепловой насос имеет два внешних терминала, соответственно «Увеличение нагрузки» и «Уменьшение нагрузки». Сигналы подаются к этим клеммам управления клапаном и изменяют количество хладагента сжимаемого компрессором. В результате энергопотребление устройства теплового насоса изменяется. Эксперимент проводят в режиме нагрева и только один из двух тепловых насосов контролируется. Коэффициент ошибок измерительной системы составляет 2%.
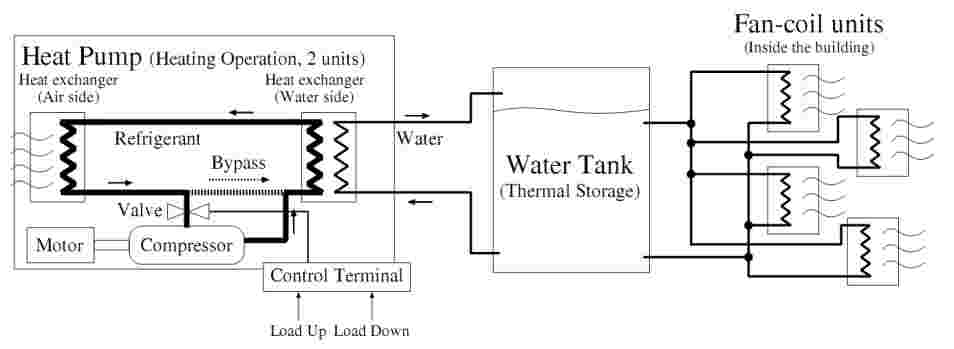
Рисунок 3 – Система кондиционирования воздуха, используемая в экспериментах.
B. Исследование переходной характеристики.
В исследовании переходной характеристики был дан простой сигнал «Увеличение нагрузки» или «Уменьшение нагрузки» к тепловому насосу и изменение его потребляемой мощности измерялось. Эксперимент проводился в следующих двух случаях:
Случай 1: Потребляемая мощность минимальная – максимальная
Случай 2: Потребляемая мощность максимальная – минимальная
На рисунках 4 и 5 показаны переходные характеристики потребляемой мощности для случая 1 и 2, соответственно.
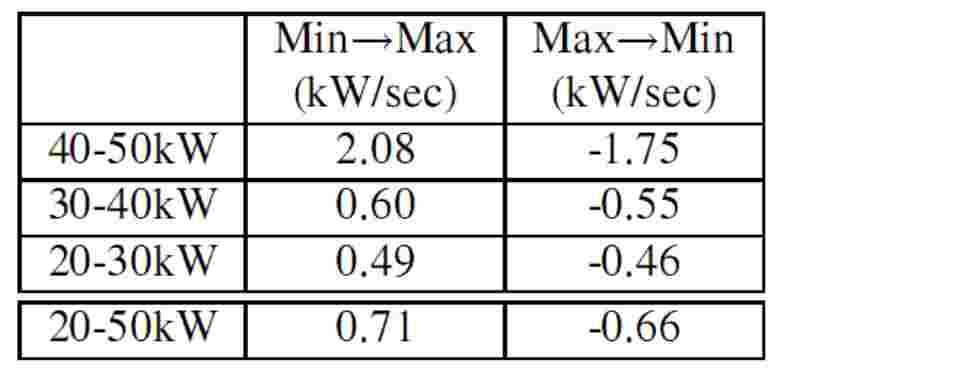
Эти результаты показывают, что тепловой насос реагирует быстро, когда он сильно загружен. Таблица III показывает среднюю скорость изменения потребляемой мощности, которая рассчитывается каждые 10 кВт.
Таблица показывает, что быстродействие потребляемой мощности по скорости изменения, по меньшей мере, 0.45 кВт/с, что можно ожидать, когда тепловой насос используется для компенсации мощности.
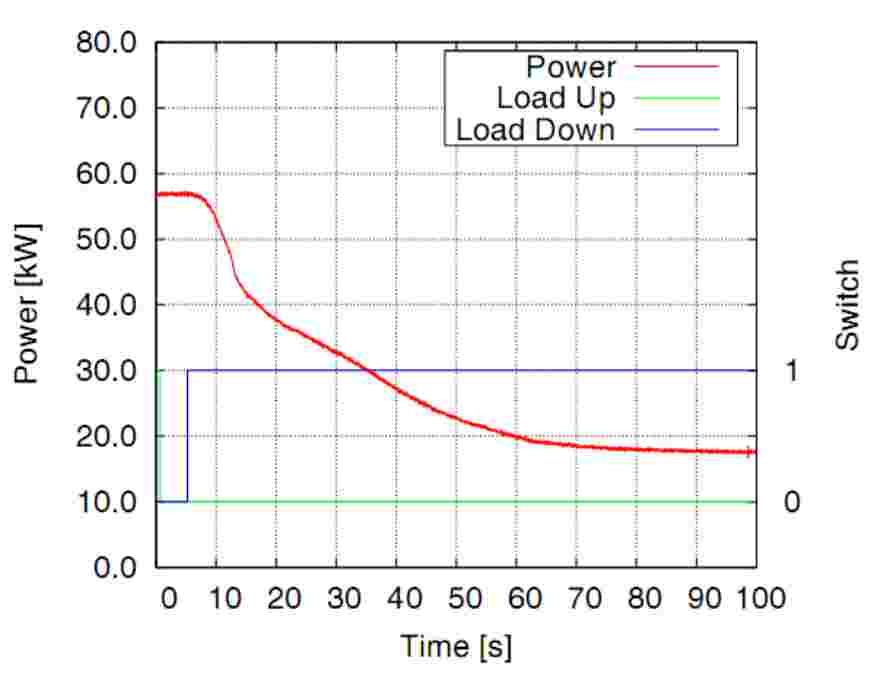
Рисунок 4 – Исследование переходной характеристики (минимум – максимум)
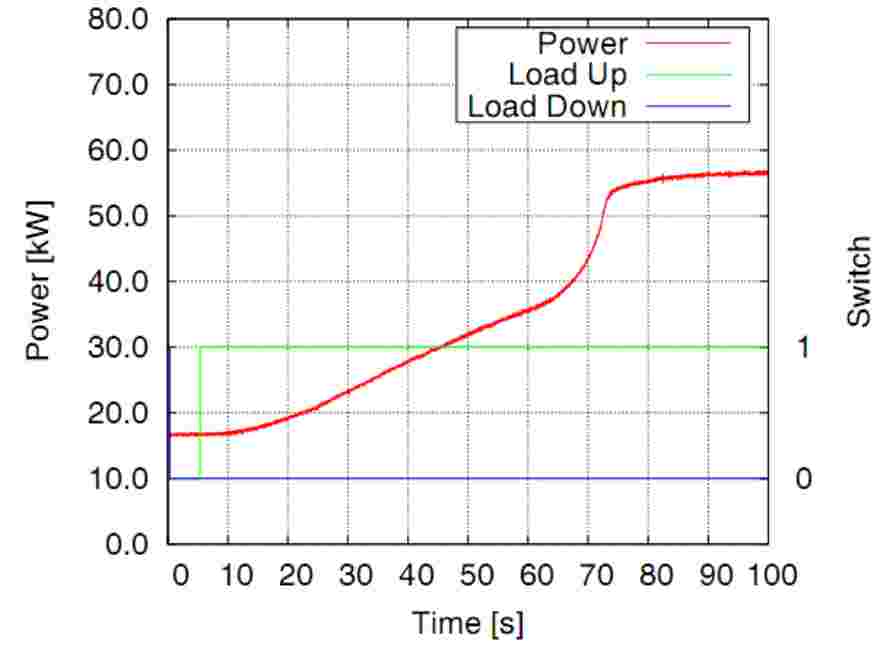
Рисунок 5 – Исследование переходной характеристики (максимум – минимум)
Таблица III – Изменение средней скорости потребляемой энергии
С. Испытание реакции синусоидальной волны.
Испытание реакции синусоидальной волны было сделано, чтобы проанализировать амплитудно–частотную характеристику более количественно. Кроме того, испытание реакции синусоидальной волны более тяжелое испытание для теплового насоса, так как изменения опорного сигнала непрерывны.
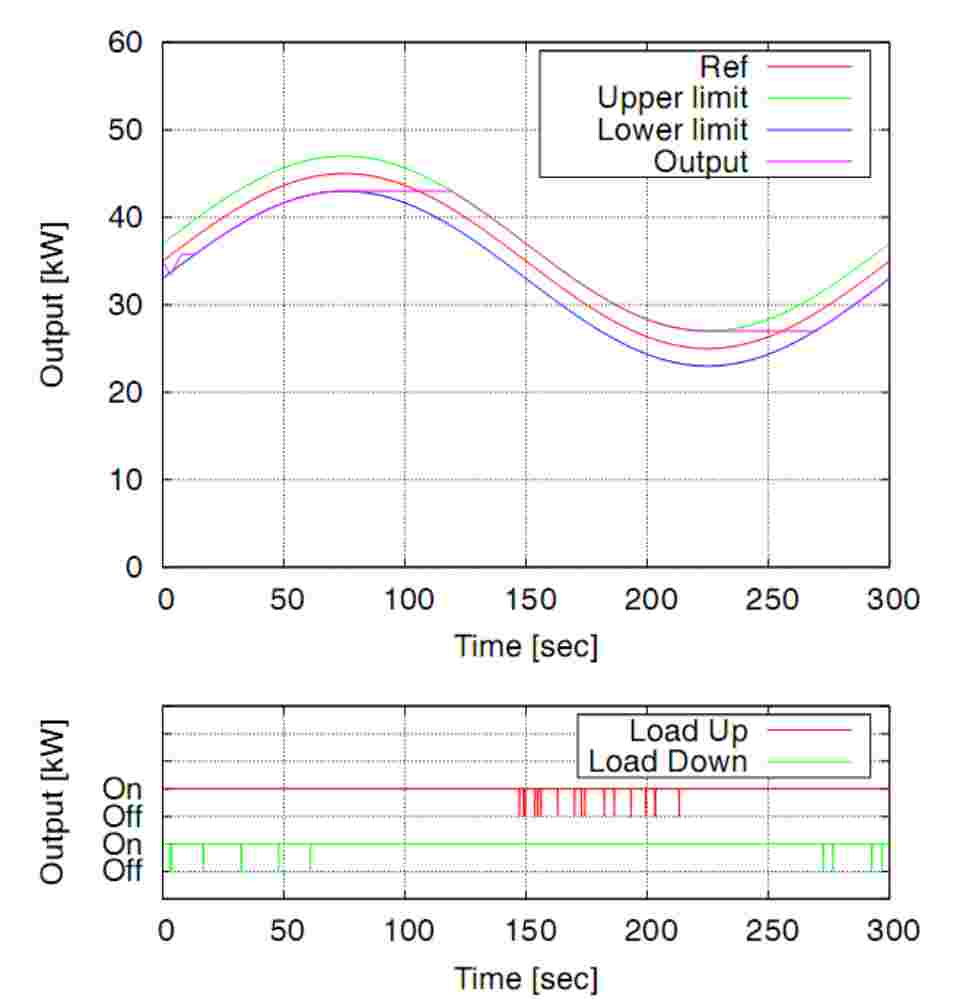
Рисунок 6 – Пример опорного сигнала синусоидальной волны
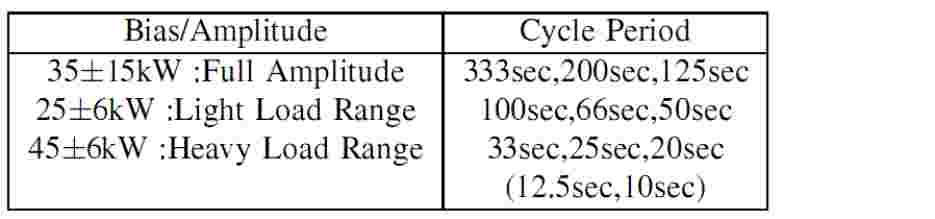
Таблица IV – Параметры волны
Опорная синусоидальная волна была уделена в тепловом насосе для изменения сигнала Верхней нагрузки
и Нижней нагрузки
в соответствии с образцом, рассчитанным микрокомпьютером. Образец был рассчитан так, чтобы потребляемая мощность не создавала отклонения полосы между верхним пределом и нижним пределом. Пример опорной волны показан на рис. 6. Испытание было проведено с различной амплитудой, смещением, и периодом волны, которые показаны в таблице IV.
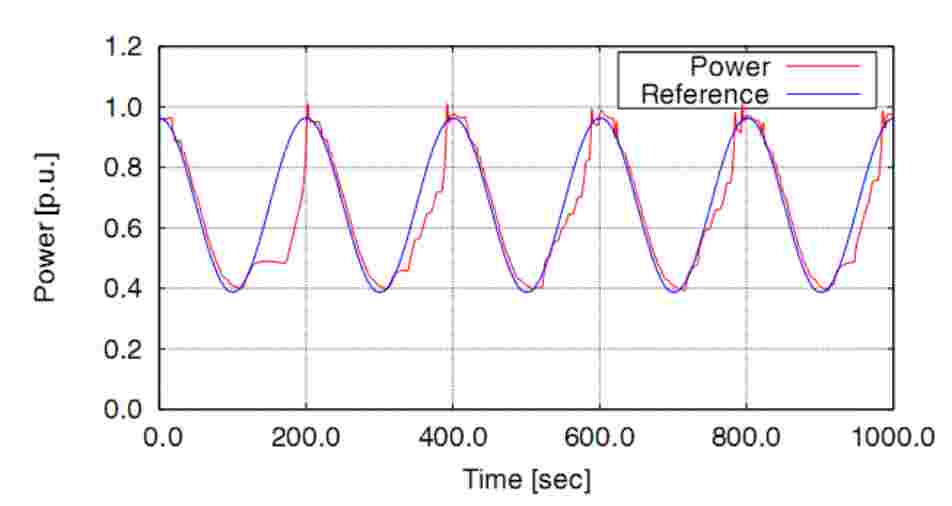
Рисунок 7 – Реакция синусоидальной волны (Полная амплитуда, 200 с.)
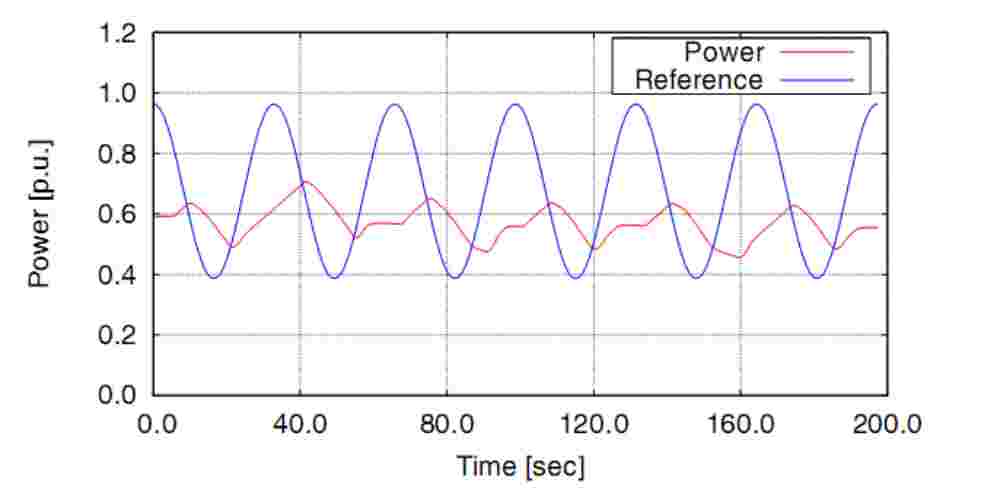
Рисунок 8 – Реакция синусоидальной волны (Полная амплитуда, 33 с.)
Рисунки 7 и 8 показывают типичные результаты испытания реакции синусоидальной волны. В случае рис. 7, потребляемая мощность теплового насоса следует за его опорным сигналом, но в случае рис. 8, изменение опорного сигнала происходит слишком быстро для следования тепловой мощности.
Дискретное преобразование Фурье (ДПФ) было использовано для определения частотной характеристики энергопотребления, фазового сдвига и амплитуды, которые представлены, как диаграмма Боде и показаны на рис.9. На рис.9, три диаграммы Боде строятся на основе трех амплитуд испытания соответствующего диапазона, проводятся измерением реакции синусоидальной волны: полный диапазон амплитуды, диапазон тяжелой нагрузки и диапазон легкой нагрузки. На рис. 10 показана частотная характеристика теплового насоса в сравнении с деятельностью других аппаратов: NiMH аккумулятора, двухслойного электрического конденсатора (EDLC) и газового двигателя.
Таблица V – Минимальный период синусоидальной волны за который можно отслеживать потребляемую мощность
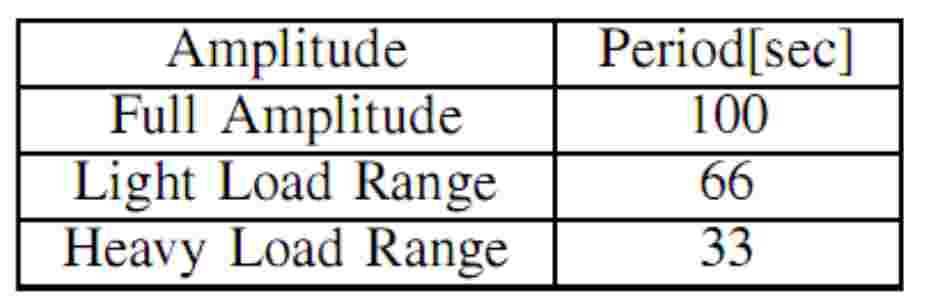
Таблица V показывает минимальный период синусоидальной волны, когда потребляемая мощность может отслеживаться, –3 дБ считается пограничной величиной.
АЧХ теплового насоса быстрее, чем у GE и медленнее, чем у ESSs, когда тепловой насос работает в диапазоне тяжелой нагрузки. Таким образом, управление тепловым насосом может компенсировать быстрее колебания мощности по сравнению с GE и имеет возможность снижения необходимой энергоемкости для ESSs.
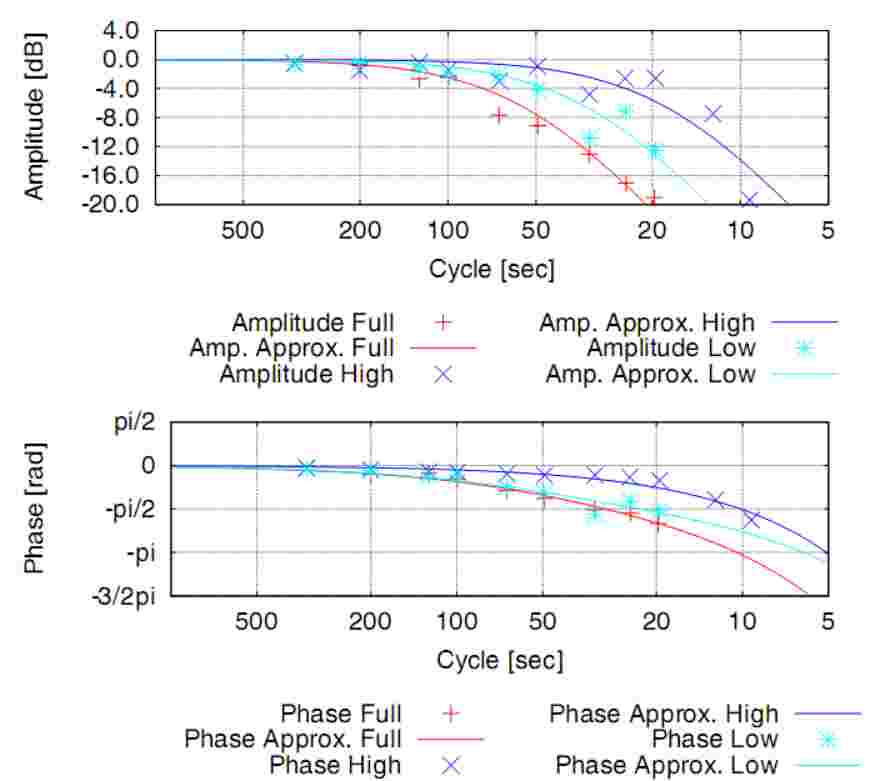
Рисунок 9 –Логарифмическая амплитудно–частотная и фазочастотная характеристика (Вверху: амплитуда, Внизу: фаза)
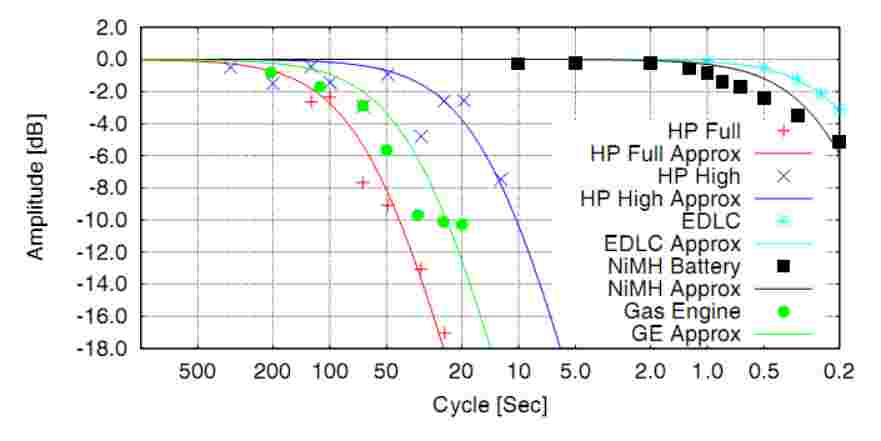
Рисунок 10 – Сравнение с реакцией других устройств
III. Моделирование управлением микросетью, которая содержит тепловой насос
На основании полученного результата от эксперимента осуществлялось моделирование управлением микросетью, включающей тепловой насос системы кондиционирования воздуха.
А. Модель микросети.
Модель микросети с газовым двигателем (GE), в ESS и тепловым насосом предполагается в симуляции. В данной модели, характеристика потребляемой мощности теплового насоса моделируется с помощью передаточной функции первого порядка, которая представлена формулой (1) в области Лапласа. Y(s) – потребляемая мощность, X(s) – опорное значение и t – постоянная времени модели. s – обозначает дифференциальный оператор.
На основании измеренной характеристики потребляемой мощности, показанной в разделе II, постоянная времени теплового насоса была установлена на 30 секунд.
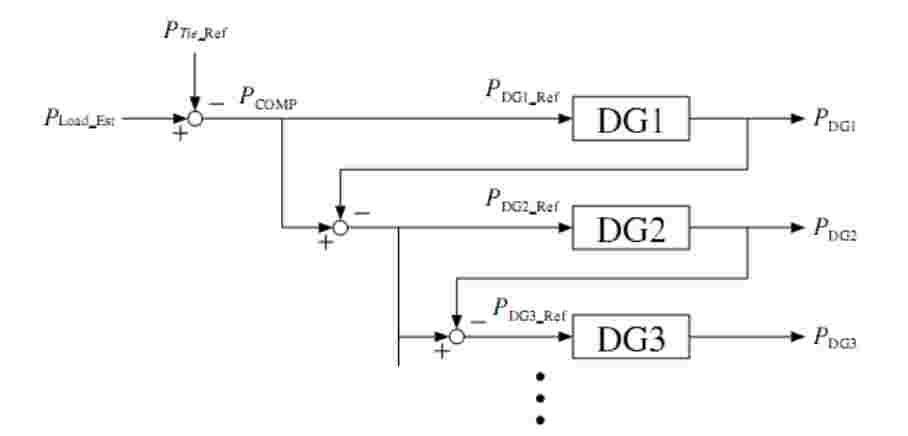
Рисунок 11 – Структурная схема подчиненного системы регулирования
Передаточная функция модели первого порядка, которая представлена (1) также используется для моделей ESS и GE. Для ESS и GE, постоянной времени модели является 0.04 секунды и 70 секунд соответственно.
В данной модели, состояние заряда (SoC) ЕСС рассчитывается путем интеграции суммы своей выработки и потери во время заряда и разряда.
В качестве нагрузок в микросети используются данные реальной нагрузки. В этой модели микросеть подключена к коммерческой сети через линию связи и систему управления, которая разработана, чтобы удерживать поток мощности линии связи на постоянном значении.
В. Система управления
Система гибридного управления используется для управления мощностью в GE, ESS, и теплового насоса. Эта система управления представляет собой комбинацию каскадного и местного управления [4].
Рис. 11 показывает блок–схему системы каскадного управления. В каскадном управлении, потребляемая мощность в микросети оценивается путем измерения потока мощности линии связи и выходной мощности DG. Количество энергии, которое должно быть компенсировано (PCOMP) рассчитывается путем вычитания начального значения потока мощности линии связи от расчетной нагрузки. Как показано на рис. 11, DGs в микросети организованы в соответствии с их скоростью реакции активной выходной мощности. DGs, которые имеют медленную реакцию компенсируют сначала мощность, а остальное PCOMP компенсируется более быстрыми DGs. Когда ESS используется для компенсации, его состояние заряда (SoC) контролируется подачей сигнала SoC к замедлению DG.
Так как, каскадное управление имеет задержки в измерении мощности, самая быстрая часть колебаний компенсируется DG, который управляется локально.
Структурная схема системы управления, используемой в моделировании, показана на рис. 12. Часть, обозначенная красными линиями – система управления тепловым насосом.
Опорный сигнал от GE пропускается через LPF (ФНЧ) с постоянной времени 200 секунд, чтобы предотвратить слишком быстрые колебания от GE. Кроме того, чтобы предотвратить избыточную компенсацию SoC ЕСС, сигнал SoC пропускается через LPF (ФНЧ) с постоянной времени 100 секунд.
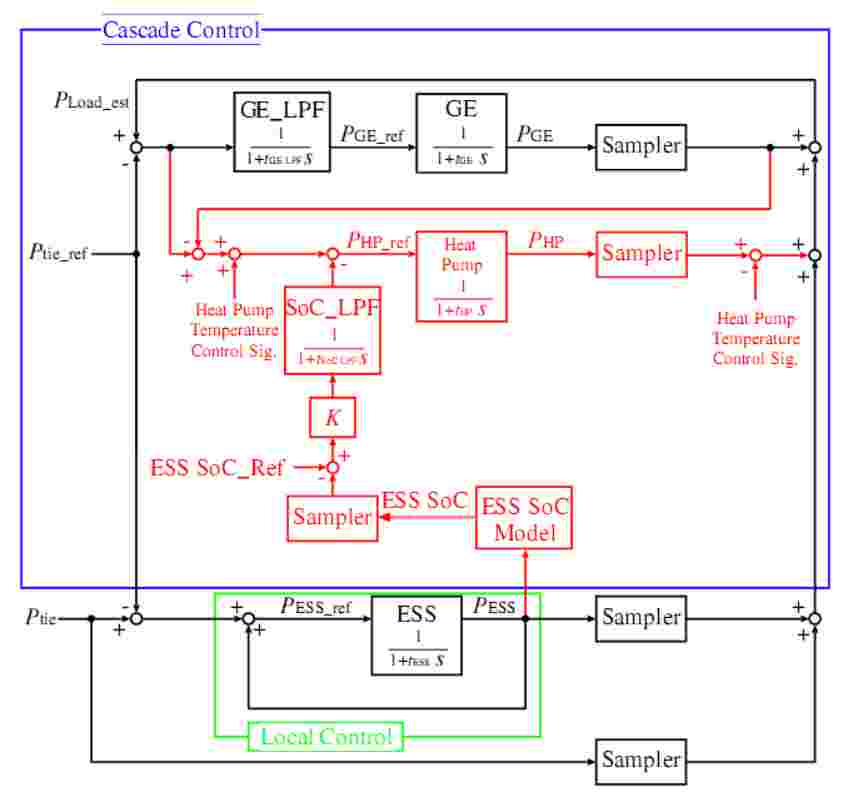
Рисунок 12 – Структурная схема системы управления при моделированиии
C. Температурное моделирование и управление
Для изучения влияния контроля теплового насоса, температурное моделирование пространства внутри здания проводилось в то же время. Температура была вычислена, основываясь на тепловом балансе комнаты, который изображен на рис. 13. Принятый размер комнаты 3 x 5 x 5 = 75 [м3], и принятый размер окна – 2 x 4=8 [м2].
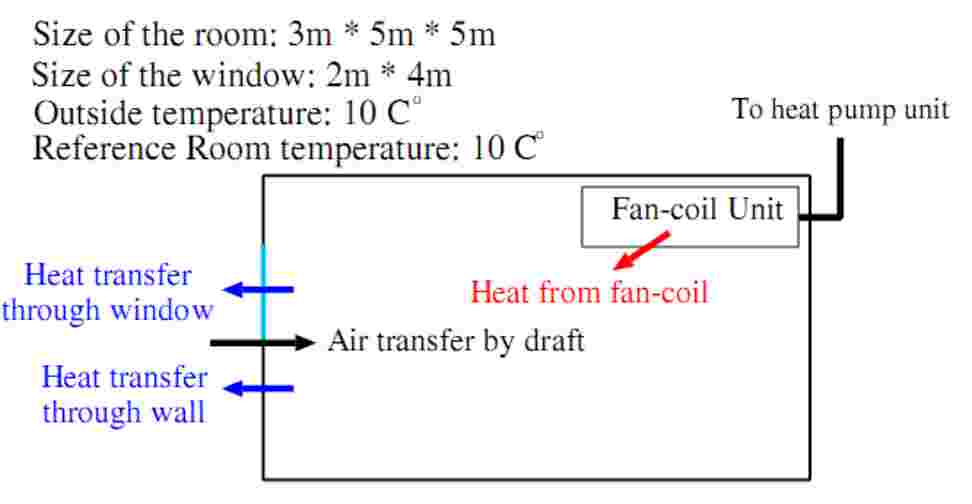
Рисунок 13 – Тепловой баланс комнаты
Теплота от блока катушки вентилятора (qfc [Вт]) рассчитывается по формуле (2) [3]. В (2), PHP [Вт] – потребляемая мощность блока теплового насоса, COP – коэффициент полезного действия теплового насоса, и NRoom – количество комнат, которые будут с подогревом. В данной модели, значение COP составляет 2,5. Значение NRoom составляет 200, что примерно соответствует площади, которую охватывает система теплового насоса, используемая в эксперименте.
Тепловой поток через стену (qout [Вт]) рассчитывается по формуле (3) [7]. AW [м2] – площадь стены, KW [Вт / (м2 · К)] – коэффициент теплопередачи стены, Troom – температура в помещении, и Tout – наружная температура. Когда бетонная стена толщиной 150 миллиметров, предполагается значение KW,составляющее 3.81 [Вт / (м2 · К)].
Тепловой поток через окно также может быть вычислена по формуле (3), но величина KW отличается от таковой для бетонной стены. Когда окно стеклянное, значение KW составляет 6.4 [Вт / (м2 · К)].
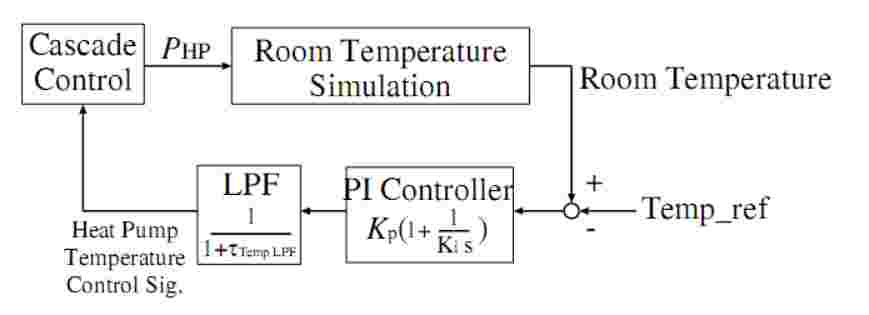
Рисунок 14 – Температурное управление
Таблица VI – Варианты моделирования

Эффект вытяжки воздуха через небольшие промежутки в стене учитывается путем расчета объема воздуха в вытяжке (V1 [м3]), который рассчитывается по (4). В (4), Vroom – объем помещения, NV [раз/ч] – частота вентиляции, вызванной вытяжкой воздуха. Для среднего класса зданий, величина NV составляет около 1,0 [раз/ч].
После расчета V1, потери тепла при вытяжке (qdraft [Вт]) могут быть рассчитаны, как показано в (5), где dair – плотность воздуха, и Cair – удельная теплоемкость воздуха.
При моделировании, опорная температура комнаты устанавливается на 25 °С , а температура наружного воздуха устанавливается на 10 °С.
Сигнал температурного управления тепловым насосом
на рис.12 рассчитывается таким образом, чтобы температура в помещении оставалась на постоянном уровне. Рис. 14 показан контур управления температурой. Параметр Kp и Ki составляют 50 и 100 соответственно. Постоянная времени tTempLPF составляет 2 секунды.
D. Результат моделирования
Моделирование проводилось для трех случаев, указанных в табл. VI.
В случае 1, тепловой насос работает только в соответствии с управлением температурой и SoC ЕSS не контролируется. В случае 2, тепловой насос работает только в соответствии с температурным управлением, но SoC ЕSS управляется GE. В случае 3, тепловой насос работает в соответствии с каскадного и температурным управлением, а также тепловой насос, который имеет более быструю частотную характеристику по сравнению с GE, контролирует SoC ЕSS. Рис. 17 показывает выходы DGs и потребляемую мощность теплового насоса для трех случаев. Рис. 15 показывает SoC ЕSS и рис. 16 показывает изменение комнатной температуры. Значение 0 кВтч на рис. 15 указывает начальное значение SoC. В рис. 16, линия случая 2 перекрывает линию случая 1 почти полностью.
По сравнению со случаями 1 и 2, колебания SoC ЕСС подавляются в узком диапазоне в случае 3. С другой стороны, есть большие колебания температуры в помещении в случае 3. Там не было никакого существенного различия в потоке мощности линии связи между тремя случаями, как показано в табл. VII. Итоги результатов, которые состоят из данных SoC и температуры здания приведены в таблицах VIII и IX.
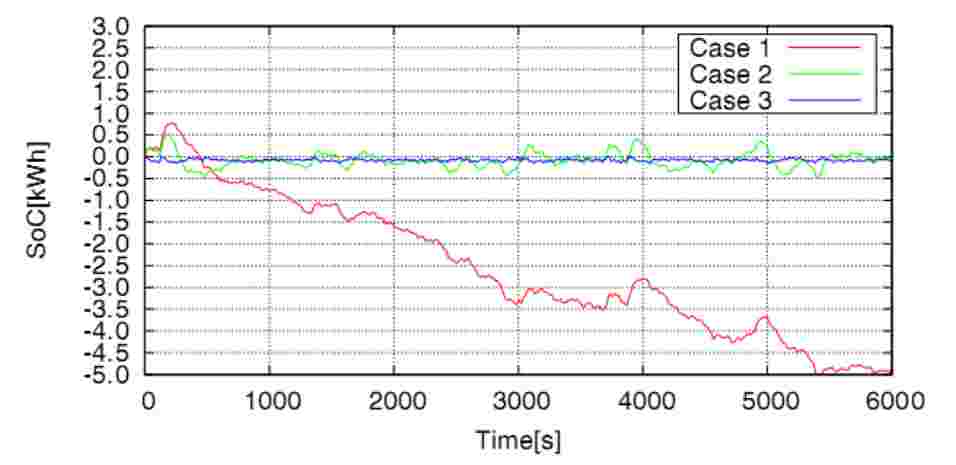
Рисунок 15 – SoC для ESS
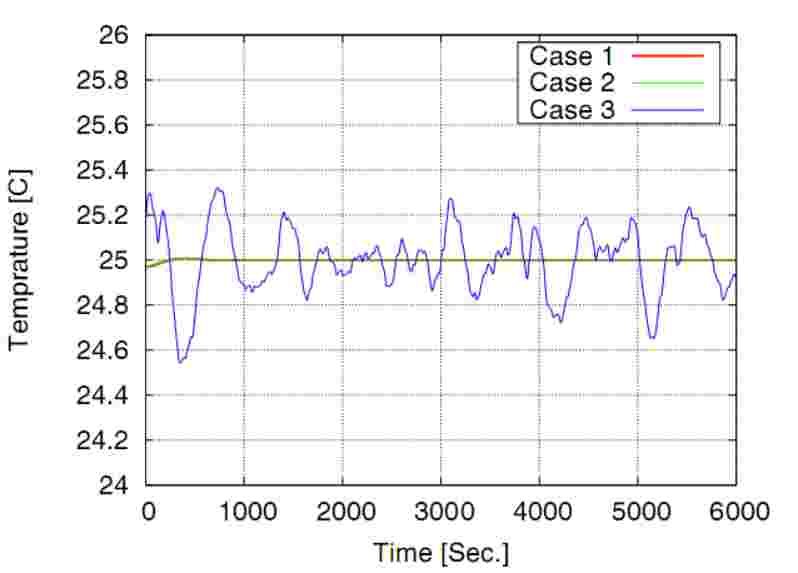
Рисунок 16 – Комнатная температура
Таблица VII – Статистические показатели потока мощности по линии связи
Судя по значению от пика до пика SoC, можно сказать, что энергоемкость ESS может быть снижена примерно на 0,95 кВт с управлением тепловым насосом в данном конкретном случае. Стандартное отклонение сократилось до 0.15kWh. Колебания выхода GE не уменьшится при управлении тепловым насосом.
Эти цифры показывают, что управление тепловым насосом подавляет энергию колебания ЕSS. Вместо этого увеличиваются колебания температуры в здании.
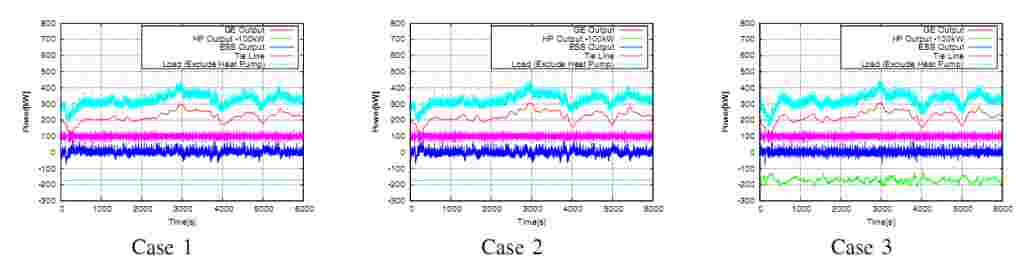
Рисунок 17 – Выход DGs и потребляемая мощность теплового насоса
Таблица VIII –Статистические показатели потока данных SoC
Таблица IX –Статистические показатели комнатной температуры
IV. Заключение.
Тепловой насос воздушного кондиционера имеет длительную постоянную времени против нарушений. Таким образом, управление тепловым насосом в микросети представляется эффективным методом для снижения энергоемкости ЕSS требующей, компенсировать колебания мощности без значительного влияния на температуру в помещении.
В этой статье переходная характеристика и характеристики реакции волны электропотребления теплового насоса были измерены экспериментально в качестве примера. Было проверено, что потребляемая мощность теплового насоса может следовать по синусоидальной волне с периодом, 33 секунд или дольше.
Использование характеристику, полученную из эксперимента, было проведено моделирование управления микросетью, включающую управление тепловым насосом. Результат показал, что управление тепловым насосом является эффективным для снижения энергоемкость ESS, с относительно небольшим изменением комнатной температуры.
Список использованной литературы
1. S. Kawachi et al. Energy Capacity Reduction of Energy Storage System in Microgrid Stabilized by Cascade Control System
EPE2009, Barcelona, Spain, No.0208, September 2009
2. H. Irie, A. Yokoyama, Y. Tada Modeling for Frequency Control Analysis of Power System with a Large Penetration of Wind Power Generation by a Lot of Controllable Heat Pump Systems and Battery Systems
, POWERCON 2008 & Power Conference in India, 0455, Delihi, India, 2008
3.W. Giedt Principles of Engineering Heat Transfer
D. VAN NOSTRAND CO., Inc., New York, 1957
4. T. Kikuchi et al. High Quality Power Supply Method for Islanding Microgrid by use of Several Types of DG Systems including Rotation Machines
IEEJ Trans. Power & Energy, Vol.129, No.12, pp1561–1566, 2007 [In Japanese]
5. Electric Technology Research Association Report Vol.56 No.4 Technology of Distributed Power Source and Prospective View of Power Network
, 2001 [In Japanese]
6. Y. Nishizaki Blade Pitch Angle Control and its Capacity Reduction Effect on Battery for Load Frequency Control in PowerSystem with a Large Capacity of Wind Power Generation
IEEJ Trans. PE, Vol.129, No.1, 2009 [In Japanese]
7. Japan Society of Refrigerating and Air Conditioning Engineers Standard Elementary Text –Refrigeration and Air Conditioning Technology–
, 2009 [In Japanese]




