Квазичастотне управління асинхронним двигуном як засіб підвищення ефективності функції Kick-start
Автор: К. М. Маренич
Источник: Взрывозащищённое электрооборудование. Сб научн. трудов УкрНИИВЭ. – Донецк, 2013. – С. 118–124.
Розглянуті властивості способу квазичастотного управління асинхронним двигуним в контексті реалізації функції Kick-start
стосовно запезпечення гарантованого зрушення рухомих елементів електропривода при виникненні завеликих моментів опору.
Ключові слова: асинхронний двигун, момент опору, тиристорний регулятор, квазисинусоїдальна напруга, струм, механічні характеристики, осцилограми параметрів
Постановка задачі та її актуальність. Властивості механічної характеристики асинхронного двигуна (АД) з короткозамкненим ротором визначають його певні недоліки і функціональні обмеження:
- зменшення більш, ніж у 2 рази, пускового моменту у порівнянні з максимальним;
- початковий етап розгону до моменту досягнення ковзанням критичного значення (sкр) супроводжується підвищенням прискорення обертання ротора (оскільки двигун у цей термін знаходиться на нестійкій ділянці механічної характеристики);
- наявність вимушеної і вільної складових магнітного потоку у взаємовпливі обумовлюють утворення коливальних складових моменту двигуна на початку пуску при контакторному підключенні статора до мережі.
Отже, при застосуванні асинхронного двигуна з короткозамкненним ротором в разі його контакторного підключення до живлячої мережі завжди існує ймовірність відсутності рушійного стану ротора через перевищення моментом опору механізму величини пускового моменту двигуна. Крім цього, пуск з підвищенням прискорення ротора та при наявності коливань електромагнітного моменту обумовлюватиме суттєве зменшення ресурсу трансмісії електроприводу.
Цими обставинами обумовлене поширене застосування засобів уповільнення пуску АД (пристрої Soft-start
) що функціонують в режимі регулятора напруги [1]. Розімкненна система автоматичного управління дозволяє змінювати у часі величину вихідної напруги регулятора, що подається на двигун, від фіксованої зменшеної величини до номінальної за умови фазового регулювання кутів відпирання α (провідності β) тиристорів.
Однак усунення динамічних перевантажень приводу не вирішує проблему дотримання достатніх якісних показників стосовно пускового режиму. Враховуючи на квадратичну залежність електромагнітного моменту АД від величини живлячої напруги, слід очікувати суттєве погіршення пускових властивостей електроприводу на початковій стадії розгону при живленні напругою, меншою за номінальну.
Частково це протиріччя вирішується шляхом застосування ефекту Soft-start
– способом короткочасного формування напруги, близької до номінальної величини на початку пуску двигуна з подальшим виконанням функцій Soft-start
[41].
В цьому випадку асинхронний двигун не розвиватиме момент більший, ніж той, що обумовлений його природною механічною характеристикою. У той же час, в умовах гірничого виробництва використовується багато видів устаткування з підвищеним моментом опору, у т. ч., – підвищеним моментом опору при зрушенні у порівнянні з моментом опору в стані руху; Ця властивість є типовою, зокрема, для скребкових конвеєрів (момент опору при зрушенні є більшим у 1.6 – 1.8 рази, ніж момент опору в стані руху) [2]. Крім того, момент опору може суттєво збільшуватися в разі пуску повністю завантаженого скребкового конвеєра. Отже, властивості існуючих засобів реалізації функції Kick-start
при виконанні керованого пуску такої установки можуть бути не достатніми. Таким чином актуальною є задача обгрунтування способу управління асинхронним електроприводом гірничої машини, при якому в режимі Kick-start
досягатиметься перевищення пусковим моментом двигуна критичного значення при стійкій роботі зі зменшеною кутовою швидкістю.
Аналіз досліджень і публікацій. Аналіз відомих способів керованого пуску асинхронних електроприводів гірничих машин свідчить про те, що ні частотне регулювання, ні реостатний, ні каскадний способи не дозволяють здійснити пуск асинхронного електропривода при дотриманні фіксованого рівня зменшеної швидкості з підвищенням електромагнітного моменту до величини, більшої за критичний рівень [3]. Жоден з цих, способів не дозволяє і реверсувати двигун без контакторних переключень в ланцюгах живлення статора.
Основний матеріал та результати дослідження. Прийнятними показниками відрізняється квазичастотне управління параметрами асинхронного електроприводу [4]. Відповідно до цього способу формування системи напруг досягається переключенням груп тиристорів трифазного регулятора по черзі у відповідності із таблицею станів (табл. 1). Умовою формування напруг, симетричних у фазах та півхвилях є дотримання тривалостей Δt формування відпираючих імпульсів для кожної групи (по одному тиристору у фазі):

де fмод – частотна модуляції квазисинусоїдальної напруги; fм – промислова частота мережі; n – число натурального ряду; знаки +
та -
відповідають прямому та зворотному порядку фазних квазисинусоїдальних напруг.
| Інтервали комутації | Ввімкнені тиристори | |||||||||||
| Прямий порядок фаз | Зворотний порядок фаз | |||||||||||
| VS1 | VS2 | VS3 | VS4 | VS5 | VS6 | VS1 | VS2 | VS3 | VS4 | VS5 | VS6 | |
| 1 | Х | Х | Х | Х | Х | Х | ||||||
| 2 | Х | Х | Х | Х | Х | Х | ||||||
| 3 | Х | Х | Х | Х | Х | Х | ||||||
| 4 | Х | Х | Х | Х | Х | Х | ||||||
| 5 | Х | Х | Х | Х | Х | Х | ||||||
| 6 | Х | Х | Х | Х | Х | Х | ||||||
Приклад формування фрагменту квазисинусоїдальних напруг uквА; uквВ; uквС на інтервалі Δt наведений на рис. 1. Величини напруг на фазах навантаження (uквА; uквВ; uквС) та нульовій точці (зірці
) навантаження (uО) на окремих часових інтервалах t0 – t1; t1 – t2; t2 – t3 визначаються виразами (табл. 2).
Таким чином, прийнявши n = 1 у виразі (2), можна отримати системи квазисинусоїдальних напруг частоти fмод = (50/7) = 7,14 Гц прямого порядку слідування у фазах та частоти fмод(50/5) = 10 Гц зворотного порядку. Дослідженням [4] встановлено, що АД в цьому разі розвиватиме пусковий момент, у двічі більший, ніж критичний момент (рис. 2). Це створює сприятливі умови для підвищення ефективності режиму Kick-start
, зокрема, при зрушенні з місця елементів трансмісії завантаженого електропривода що зазнав стопоріння.
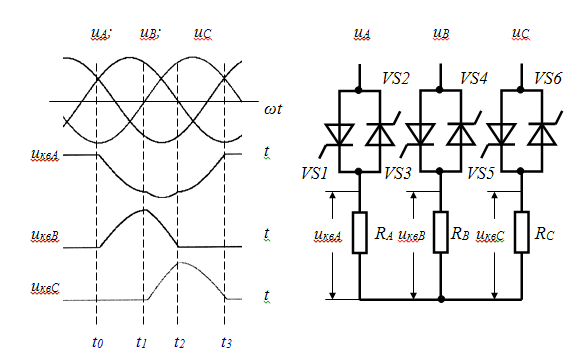
Рисунок 1 – Діаграма формування фрагментів квазисинусоїдальних напруг на активних опорах RA, RВ, RС навантаження на часовому інтервалі t0 – t3 (у відкритому стані – група тиристорів VS2; VS3; VS5)
| Напруги на елементах навантаження | Часові інтервали | ||
| t0 – t1 | t1 – t2 | t2 – t3 | |
| uквА | (uА – uВ) / 2 | Umsinωt | (uА – uC) / 2 |
| uквВ | (uB – uA) / 2 | Umsin(ωt – 2π / 3) | 0 |
| uквС | 0 | Umsin(ωt + 2π / 3) | (uC – uA) / 2 |
| uо | uА – (uА – uВ) / 2 | 0 | uА – (uА – uC) / 2 |
Ефект підвищення удвічі критичного моменту АД при живленні квазисинусоїдальними струмами низьких частот підтверджений в результаті експериментальних досліджень шляхом виміру розтягуючого зусиля (F) в застопореному скребковому ланцюзі конвеєра при його пуску (живлення експериментальної установки здійснювалось від джерела з номінальною лінійною напругою 380 В частоти 50 Гц). При цьому встановлені наступні співвіднощення:
- відношення розтягуючих зусиль в сталому стані при квазичастотному управлінні (fмод = 7.14 Гц) та при живленні АД номінальною напругою промислової частоти – 180 кН / 90 кН;
- відношення пускових струмів при квазичастотному управлінні (fмод = 7.14 Гц) та при живленні АД номінальною напругою (fм = 50 Гц): ІКВ.П. / ІН.П. = 1,019;
- відношення діючих струмів АД в рухомому (ІРУХ) та нерухомому (ІСТОП) стані ротора при квазичастотному управлінні (fмод = 7.14 Гц): ІРУХ / ІСТОП = 1,234 [4].
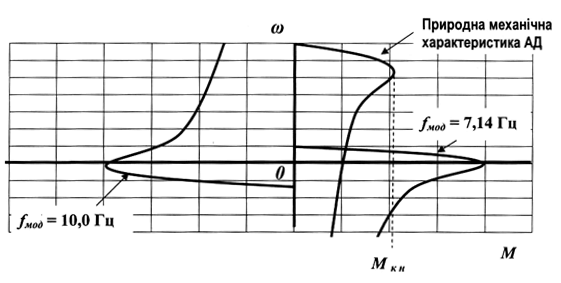
Рисунок 2 – Механічні характеристики асинхронного двигуна: природна та штучні при квазичастотному електроживленні з частотами модуляції напруги fмод = 7.14 Гц прямого порядку фаз та fмод = 10.0 Гц зворотного порядку фаз
Останнє ілюструється осцилограмами (рис. 3) і пояснюється впливом зворотної ЕРС АД схему тиристорного регулятора у наслідок чого збільшуються інтервали провідності тиристорів при формуванні середнього та останнього фрагментів квазисинусоїдальної напруги кожної півхвилі [4].
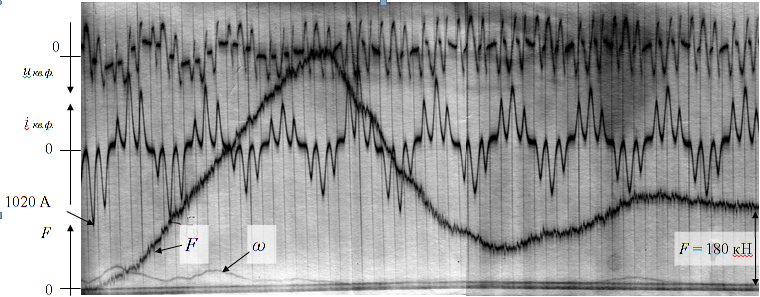
Рисунок 3 – Осцилограми фазних квазисинусоїдальних напруги Uкв.ф; струму Iкв.ф асинхронного двигуна потужністю 32 кВт а також розтягую чого зусилля F у скребковому ланцюзі конвеєра при пуску в стані стопоріння ланцюга на відстані 4 м від барабана; fмод = 7.14 Гц; ω – параметр кутової швидкості ротора АД
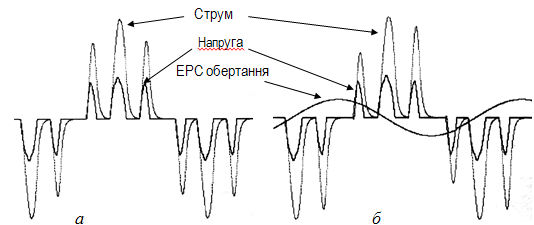
Рисунок 4 – Діаграмми фазних струму, напруги і ЕРС обертання АД, а – ротор нерухомий; б – ротор обертається
Висновки. Квазичастотним управлінням АД забезпечується стійкий рух ротора зі зменшеною кутовою швидкістю при підвищеному удвічі критичному моменті. Напрям обертання ротора визначається порядком переключення груп тиристорів трифазного регулятора в ланцюзі статора АД. Процес супроводжується підвищенням споживаного струму (що є фактором обмеження тривалості застосування казичастотного режиму для електроживлення АД). Однак, позитивні властивості цього режиму можуть бути використані для запровадження надійного зрушення завантаженого (заштибованого, або застопореного) асинхронного електроприводу гірничої машини.
Список літератури
- Савицкий В. Н., Митрохин В. Л. Взрывозащищённое устройство плавного пуска КУВПП-250 М УХЛ5.
- Леусенко А. В. Скребковые конвейеры / [А. В. Леусенко, Г. В. Высоцкий, Б. А. Эйдерман]. – М.: Недра, – 1993. – 221 с.
- Автоматизований електропривод машин і установок щахт і рудників. Навчальний посібник для вузів / [К. М. Маренич, Ю. В. Товстик, В. В. Турупалов, С. В. Василець, І. Я. Лізан]; під ред. К. М. Маренича. Донецьк, ДонНТУ, 2012. – 245 с.
- Маренич К. Н. Асинхронный электропривод горных машин с тиристорными коммутаторами / К. Н. Маренич. – Донецк: ДонГТУ, 1997. – 64 с.