Устройство защиты конвейера с регулируемым приводом
Автор: В. Г. Дубовик, Л. Н. Лебедев, И. П. Иванов, Д. О. Мишурняев
Источник: Матеріали науково-технічної конференції інституту енергозбереження та енергоменеджменту Матеріали науково-технічної конференції інституту енергозбереження та енергоменеджменту національного технічного університету України „Київський Політехнічний Інститут“ – ЕНЕРГЕТИКА. ЕКОЛОГІЯ. ЛЮДИНА: збірник наукових праць. – Київ, 2012. – С. 361–366.
Основной причиной возникновения пожара конвейера является пробуксовка ленты, которая вызывает ее нагрев, следовательно одним из контролируемых параметром должна быть именно пробуксовка. Она возникает в результате выработки футеровки приводных барабанов, при недостаточном натяжении ленты, при нарушении режима пуска конвейера [1].
Cуществуют известные решения автоматизации управления и защиты от аварийных ситуаций шахтных ленточных конвейеров. Номенклатура подобных средств автоматизации представлена широко:
Аппаратура контроля температуры приводных барабанов АКТЛ обеспечивает контроль температуры обечайки не футерованного приводного барабана ленточного конвейера с целью защиты ленты от возгорания при пробуксовке. Контроль осуществляется как в процессе вращения так и при неподвижном состоянии барабана [2].
Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатые годы. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных систем управления позволило многим фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что изменяя частоту f1 питающего напряжения, можно в соответствии с выражением ω0 = 2πf1⁄p при неизменном числе пар полюсов p изменять угловую скорость ω0 магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики.
Недостатком известных устройствах контроля проскальзывания и скорости типа УКПС, а также контроля скорости типа РДКС-01 является отсутствие возможности контроля значение скорости ленты конвейера при изменении заданной частоты вращения его приводного барабана для разных значений производительности в одном цикле работы и низкая их надежность [3-4].
На рис. 1 представлена структурная схема устройства защиты конвейера с приводом от преобразователя частоты. Устройство защиты конвейера 1 с приводом, соединенным с первыми тремя выходами преобразователя частоты 2 (рис. 1), также состоит из блока 3 входного, который соединен со вторым входом преобразователя частоты 2, первый вход которого соединен с выходом элемента І4, а второй выход от встроенного датчика скорости привода соединены со вторым входом усилителя 5 с переменным коэффициентом, первый вход которого соединен с источником Е1 постоянного входного действия, вход преобразователя 6 соединен с датчиком 7 скорости ленты конвейера 1, вход блока 8 задержки соединены с выходом блока 9 сравнения, первый вход которого соединен с выходом преобразователя 6, второй вход соединен с выходом усилителя 5 с переменным коэффициентом, выход блока 8 задержки соединены с входом блока 10 выходных и первым входом элемента І4, второй вход которого соединен с входом блок 3 входного, на которые подается сигнал ПУСК [5].
Конвейер 1 имеет привод, который состоит из трехфазного электродвигателя и редуктора, соединенного с приводным барабаном конвейерной ленты.
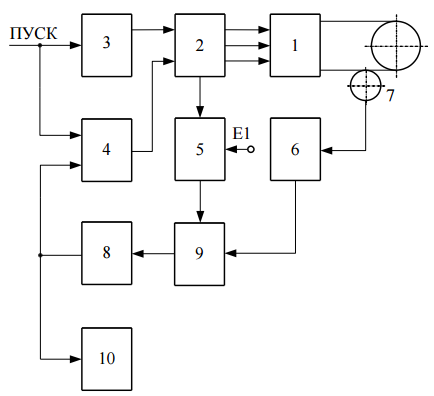
Рис. 1. Структурная схема устройства защиты конвейера с приводом от преобразователя частоты
Преобразователь частоты 2 – это классический электрический исполнительный аппарат, обеспечивающий обработку входных сигналов от блока 3 входного и имеет цепи питания от сети переменного или постоянного тока, которые не показаны на фиг. 1. Он также имеет встроенный датчик скорости приводного электродвигателя. Выход преобразователь частоты 2 имеет трехфазные цепи для подключения привода конвейера. Функция частотного преобразователя заключается в регулировании скорости вращения электродвигателя, что дает не только технологические преимущества, но и экономию электроэнергии на 15-20%, также снижаются пусковые токи электродвигателя и повышается срок службы. Сигнал ПУСК высокого логического уровня, который подается на первый вход преобразователя частоты 2, обеспечивает его переход в рабочий режим и при этом активизируется его второй вход. Переход преобразователя частоты 2 в режим ожидания осуществляется сигналом ПУСК низкого логического уровня.
Блок 3 входной обеспечивает формирование временного графика изменения скорости конвейерной ленты при разгоне, установившемся режиме работы после подачи сигнала ПУСК в виде высокого логического уровня или при остановке, когда сигнал ПУСК низкого логического уровня. Элементы для настройки блока 3 не показаны.
Усилитель 5 с переменным коэффициентом обеспечивает усиление сигнала с коэффициентом, который пропорционален значению сигнала от источника Е1 постоянного входного действия, что обеспечивает аналоговое управлением изменения коэффициента усиления. Для таких целей можно использовать активный элемент, сопротивление которого практически линейно изменяется при изменении напряжения управления, например, полевой транзистор, который при малых значениях напряжения "сток – исток" ведет себя как сопротивление, величина которого линейно зависит от напряжения на затворе. Сопротивление перехода "сток – исток" транзистора формирует сигнал отрицательной обратной связи по току, от величины которого зависит коэффициент усиления усилителя.
Преобразователь 6 обеспечивает усиление сигнала датчика 7 скорости, а также преобразование сигнала скорости в сигнал выходного напряжения, пропорционального скорости во всем диапазоне измерения.
Датчик 7 скорости обеспечивает формирование выходного сигнала, пропорционального линейной скорости конвейерной ленты. Он может быть выполнен с использованием датчиков с контактными и бесконтактными методами измерений, например, с использованием тахогенератора или датчика скорости на эффекте Доплера.
Блок 8 задержки обеспечивает формирование выходного сигнала, после изменения входного, с задержкой до десяти или пятнадцати секунд для недопущения случайного срабатывания устройства от помех.
Блок 9 сравнения обеспечивает формирование выходного низкого логического уровня при условии превышения значения входного сигнала напряжения преобразователя 6 в сравнении с выходным сигналом напряжения усилителя 5 с переменным коэффициентом и может быть выполнен с использованием операционных усилителей.
Блок 10 выходной обеспечивает формирование звуковых и световых сигналов, а также сигнала аварийного отключения конвейера при подаче низкого логического уровня на его вход.
Блок питания и элементы для его подключения на фиг. 1 не приведены. Принятые обозначения Uni – амплитуда сигнала на i-м выходе n-го блока. Работает устройство следующим образом. После подачи питания на устройство подается также питание на преобразователь частоты 2 и он готов для работы, аппараты для его коммутации не приведены. При этом на выходах преобразователя частоты 2 и датчика скорости 7 сигналы равны нулю. От преобразователя частоты 2 из второго выхода сигнал подается через усилителя 5 с переменным коэффициентом на второй вход блока 9 сравнения, а от датчика скорости 7 через преобразователь 6 на первый его вход, выходной сигнал U9 формируется в соответствии с характеристикой :
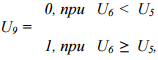
и равняется высокому логическому уровню, так, как U6 = U5 и на выходе блока 8 задержки через время задержки до десяти или пятнадцати секунд также устанавливается высокий логический уровень, который подается на первый вход элемента И 4, разрешающий прохождение сигнала ПУСК на его выход. При подаче сигнала ПУСК в виде высокого логического уровня из схемы управления конвейером, на выходе элемента И 4 устанавливается высокий логический уровень, в соответствии с характеристики U4 = Uпуск·U8. Преобразователь частоты 2 переходит в активный режим и через его второй вход от блока 3 входного подается сигнал U3 задания скорости ленты конвейера 1, определяющий частоту и напряжение на электродвигателе конвейера 1. Приводной барабан конвейера 1 приводит в движение конвейерную ленту до значения скорости V1 ≡ U3. На выходе датчика скорости 7 увеличивается выходной сигнал, а на выходе преобразователя 6 он пропорционален скорости V1 конвейерной ленты. С второго выхода преобразователя частоты 2 от встроенного датчика скорости приводного электродвигателя подается сигнал U2II ≡ n1 ≡ V1 на усилитель 5 с переменным коэффициентом усиления, пропорциональный частоте n1 вращения магнитного поля статора электродвигателя привода конвейера 1.
Мощность Рэм необходимая для вращения поля статора электродвигателя привода конвейера 1 с синхронной частотой сети определяется по формуле:
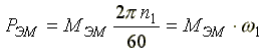

n1 – частота вращения магнитного поля, об/мин.
ω1 – угловая скорость вращения магнитного поля, рад/сек;
Рэм – мощность, необходимая для вращения поля статора;
Мэм – электромагнитный момент, необходимый для вращения поля статора
Механическая мощность Р21 на валу электродвигателя, которая создается ротором определяется по формуле:

n2 – частота вращения вала электродвигателя, об/мин.
ω2 – угловая скорость вращения вала электродвигателя, рад/сек;
Электрические потери мощности Рэ2 в электродвигателе Рэ2 = Рэм - Р21 = Мэм · ω1 · S = Рэм · S, зависят от значения скольжения электродвигателя S = (n1 - n2)⁄n1.
Значение момента M = Mэм определяется по упрощенному уравнению механической характеристики:

Значение максимального момента Mmax определяется из соотношения λ = Mmax⁄Mном, указанного в каталогах, а значение критического скольжения Sкр определяется в виде:

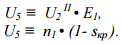
Номинальные значения скольжения Sном и момента Mном указываются также в каталоге электродвигателя. Уровень напряжения источника Е1 постоянного входного действия устанавливается при настройке устройства в соответствии с выражением Е1 ≡ (1 - Sкр). Значение сигнала U5 на выходе усилитель 5 с переменным коэффициентом усиления:
При этом учитывается, что при изменении нагрузки и номинальных значениях частоты и напряжения изменяется скольжение, ток ротора и ток статора.
Скольжение практически также изменяется пропорционально нагрузке, а с понижением частоты при работе с постоянной нагрузкой изменяется пропорционально изменению частоты, так как уравнение механической характеристики в зоне от М = 0 до М ≈ 0,9Mmax имеет вид прямой линии:

Если в двигателе под влиянием какой-либо причины снижается частота вращения вала, то скольжение его возрастет, вместе с ним возрастает крутящий момент, а критическое скольжение Sкр соответствует максимальному значению момента Mmax.
Выходной сигнал датчика 7 скорости подается на преобразователь 6, на выходе которого, при отсутствии проскальзывания конвейерной ленты, сигнал U6 ≡ n2 пропорционален частоте вращения n2 вала электродвигателя. С выхода преобразователя 6 сигнал подается на первый вход блока 9 сравнения. Так, как U6 > U5, то сигнал U9 на выходе блока 9 сравнения будет составлять логическую единицу, которая через блок 8 задержки будет подаваться на вход элемента И 4 и блока 10 выходного. При этом будет поддерживаться нормальный рабочий режим устройства. При увеличении загрузки ленты конвейера фактическое значение скольжения S = (n1 - n2) ⁄ n1 электродвигателя также увеличивается и при достижении его до значения sкр электродвигатель привода конвейера переходит в аварийный режим и останавливается. Такой режим характерный проскальзыванием ленты до остановки электродвигателя, при котором сигнал датчика 7 скорости уменьшается, на выходе преобразователя 6 он также уменьшается и сигнал U6 становится не пропорциональным. При этом, так, как U6 < U5, то сигнал U9 на выходе блока 9 сравнения будет составлять логический нуль, который через блок 8 задержки будет подаваться на вход элемента И 4, что приводит к запрету прохождения сигнала ПУСК. На первом входе преобразователя частоты 2 нулевой уровень переводит его в режим отключения электродвигателя привода конвейера, а блок 10 выходной обеспечивает формирование звуковых и световых сигналов, а также сигнала аварийного отключения конвейера, который может передаваться также и в общую систему управления. Приведенный режим проскальзывания может возникнуть при изменении скорости ленты во всем диапазоне регулирования частоты приводного электродвигателя, в котором устройство обеспечивает отключение конвейера при возникновении такой ситуации. Проскальзывание ленты может возникать также при уменьшении ее натяжения. При критическом значении Sкр, скольжения электродвигателя сигнал на выходе датчика 7 скорости уменьшается и, соответственно, на выходе преобразователя 6 он также уменьшается, что приводит к условию U6 < U5 на входах блока 9 сравнения, а на его выходе сигнал U9 будет равен логическому нулю, что приводит к отключению конвейера, аналогично, рассмотренному ранее.
При снятии сигнала ПУСК, на выходе элемента И 4 устанавливается уровень логического нуля, который переводит преобразователь частоты 2 в режим отключения электродвигателя привода конвейера. На выходе датчика 7 скорости сигнал после остановки конвейера 1 уменьшается до нуля, который через преобразователь 6 поступает на первый вход блока 9 сравнения, на втором его входе сигнал также равен нулю, поэтому на выходе остается уровень логической единицы, в соответствии с характеристикой, так как U6 = U5. С выхода блока 9 сравнения уровень логической единицы подается через блок 8 задержки на элемента И 4 и блок 10 выходной и не вызывает изменений в их состоянии. Устройство готово к очередному пуску конвейера.
Использование преобразователя частоты позволяет также осуществлять плавный пуск конвейера без перегрузок электродвигателя, плавно регулировать скорость ленты при изменении ее загрузки, увеличить межремонтные периоды механической части конвейера в 1,3-1,5 раз, снизить эксплуатационные расходы на обслуживание конвейера на 30-50%, существенно снизить потребление электроэнергии его электроприводом.
При уменьшении проскальзывания ленты относительно значения, заданного источником Е1 постоянного входного воздействия работа устройства переходит в нормальный рабочий режим конвейера 1, при котором на первом входе элемента И 4 устанавливается уровень логической единицы. Это обеспечивает прохождение сигнала ПУСК на вход преобразователя частоты 2 и рабочий режим работы привода конвейера 1, аналогично рассмотренному выше. Применение введенных преобразователя частоты 2, элемента И 4, усилителя 5 с переменным коэффициентом, блока 8 задержки, источника Е1 постоянного входного действия в состав устройства, позволяет контролировать значения скорости ленты конвейера при изменении заданной частоты вращения его приводного барабана для разных значений производительности в одном цикле работы и повышает его общую надежность.
Это позволяет не допускать повышения температуры ленты конвейера при работе и своевременно его отключать при проскальзывании ленты, позволяет также изменять порог срабатывания устройства, имеет простую конструкцию и повышенную надежность при эксплуатации, а также снижаются затраты на его обслуживание.
Устройство обеспечивает отключение конвейера при технологической перегрузке и проскальзывании конвейерной ленты, независимо от заданной скорости ее перемещения. При работе устройства используется источник Е1 постоянного входного воздействия, который позволяет просто производить настройки на конкретное допустимое значение отклонения скорости ленты относительно заданного для аварийного отключения конвейера при ее проскальзывании или перегрузке.
Перечень ссылок
- Спиваковский А. О., Дьячков В. К. Транспортирующие машины.– М.: Машиностроение, 1983.– 487 с.
- Справочник по автоматизации шахтного конвейерного транспорта/ Н. И. Стадник, В. Г. Ильюшенко, С. И. Егоров и др. - К.: Техника, 1992. – с. 348–364.
- Устройство контроля скорости РДКС-01. Паспорт. Общество с ограниченной ответственностью «Промрадар». 143517, Московская область, Истринский район, станция Холщёвики. http:// www.promradar.ru
- Техническое описание «Устройство контроля скорости УКС.1». ООО "Измерительные приборы". 660093, Красноярский край, Красноярск, Академика Вавилова, д.3.http://www.kip24.ru/product/2_28_11/
- Заявка № u 201113546 на корисну модель від 17.11.11 р. Дубовик В. Г., Лебедєв Л. М., Івановм І. П. Пристрій захисту конвеєра з приводом від перетворювача частоти. МПК В65G 43/04.