СИСТЕМА РАСПОЗНАВАНИЯ ДОРОЖНЫХ ЗНАКОВ
Авторы: Гильманов Тимур Аделевич, магистрант,КНИТУ-КАИ им. А.Н. Туполева, г. Казань
E-mail: gilmanov.tim@gmail.com
Источник: Журнал Since Time
Аннотация: В данной статье представлено описание системы распознавания дорожных знаков. Представлен состав системы, укрупненный алгоритм работы, методы распознавания.
Ключевые слова: дорожные знаки, распознавание, контурный анализ, HSV.
На сегодняшний день превышение скорости или несоответствие ее конкретным дорожным условиям является одной из основных причин совершения ДТП, в результате которых ежегодно гибнут и получают увечья тысячи человек. Причем, согласно статистике ДТП, при увеличении скорости, тяжесть последствий ДТП возрастает в геометрической прогрессии. К сожалению, не многие водители знают, что превышение скорости в реальных условиях дорожного движения не приводит к существенному выигрышу во времени. Водитель, преодолевает средний городской маршрут (около 20 км) со скоростью 80 км / ч, вместо разрешенных 60 км / ч , выигрывает во времени всего две минуты. Стоит ли рисковать и нервничать ради пары минут? Не стоит также забывать, что водитель, превышающей скорость, подвергает риску не только себя, но и окружающих людей. В ДТП на скорости 30 км / ч риск смертельного исхода для пешехода 5%, при 50 км / ч — 40%, а при 65 км / ч — уже 84%. Превышение скорости часто становится причиной тяжелых дорожно- транспортных происшествий, однако водители часто относятся к этой проблеме без должного внимания. Даже законопослушные водители, которые никогда не позволяют себе вождение в нетрезвом виде, выезда на встречную полосу и т.п., не считают опасным «небольшое» (до 20 км / ч ) превышение разрешенной скорости. На следующем графике приведена статистика ДТП, в которой явно показано, что наиболее частой причиной аварий является превышение скорости:

Рис. 1 Статистика ДТП
Несмотря на то, что на дорогах России с каждым днем появляется все больше камер регистрирующих превышение скорости, количество нарушений остается на высоком уровне.
С каждым годом количество автомобилей в мире возрастает, соответственно возрастает и количество дорожно-транспортных происшествий. В связи с этим все больше внимания уделяется автомобильным системам интеллектуальной обработки информации и принятия решений. Инженерами разных стран мира разработано множество систем активной безопасности для автомобилей таких, как ABS (антиблокировочная система), EBD (система распределения тормозных усилий), ESP (система динамической стабилизации автомобиля) и многие другие. Одной из наиболее современных является система распознавания дорожных знаков и дорожной разметки. [1]
Система распознавания дорожных знаков призвана предупреждать водителей о необходимости соблюдения скоростного режима. Данная система определяет дорожные знаки ограничения скорости при их проезде и напоминает водителю текущую максимальную разрешенную скорость, если он движется быстрее[2].
Применяемые на автомобилях системы распознавания дорожных знаков имеют типовую конструкцию, которая включает:
- видеокамеру;
- блок управления;
- экран.
Видеокамера располагается на ветровом стекле за зеркалом заднего вида. Камера снимает пространство перед автомобилем в зоне расположения дорожных знаков (справа и сверху по ходу движения) и передает изображение в электронный блок управления. Видеокамера также используется другими системами активной безопасности - системой обнаружения пешеходов, системой помощи движению по полосе.
Электронный блок управления реализует следующий алгоритм работы:
а) распознавание формы дорожного знака (круглая форма);
б) распознавание цвета знака (красный цвет на белом);
в) распознавание надписи (величина скорости);
г) распознавание информационной таблички (вид транспорта, время действия, зона действия );
д) анализ фактической скорости автомобиля;
е) сравнение скорости автомобиля с максимально допустимой скоростью;
ж) визуальное и звуковое предупреждение водителя при отклонении.
Изображение в виде знака ограничения скорости выводится на экран панели приборов (расположен внутри спидометра, на некоторых моделях – на лобовом стекле) и остается видимым, пока ограничение не закончится или будет изменено. В ряде конструкций системы распознавания дорожных знаков электронный блок взаимодействует с навигационной системой, а именно в своей работе использует данные о знаках ограничения скорости из навигационных карт. Даже если знак не будет определен видеокамерой, информация о нем будет выведена на панель приборов.
Основные этапы распознавания приведены далее:
- преобразование цветового пространства кадров видеосигнала;
- выделение контуров и удаление шумов;
- верификация объектов интереса;
- идентификация дорожного знака.
Дорожные знаки ограничения скорости имеют важные особенности такие как форма круга и красная окантовка. Поэтому первой стадией работы метода является выделение областей красного цвета на изображении. Для этого предпочтительнее использовать цветовую модель HSV, а не RGB, как у входного изображения. HSV дает возможность более точно указать оттенки красного цвета. Далее приведены формулы для перевода из палитры RGB в палитру HSV:
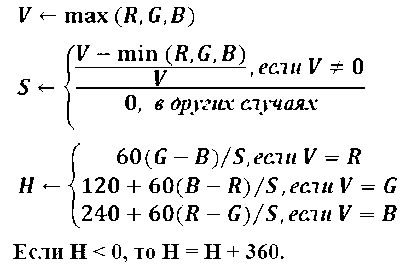
Важно отметить, что цветовая модель HSV наиболее близкая к человеческому восприятию цветов. После данных преобразований координаты цвета будут находиться в следующих диапазонах: 0<V<1, 0<S<1 ,0<H<360.
Цвет дорожных знаков меняется в зависимости от освещения. Так пороговые значения цветового тона (Hue) для дорожных знаков с красным контуром в дневное время будут отличаться от пороговых значений цветового тона (Hue) для этих знаков в ночное время. В связи с эффектом отражения света от поверхности дорожных знаков, например, при свете автомобильных фар или уличного освещения в ночное время красный цвет на знаках может восприниматься как оранжевый. [1]
После выделения областей красного цвета необходимо выделить все возможные контура которые присутствуют на изображении. Для решения этой задачи необходимо использовать известный алгоритм детектор границ Кенни, и получить все возможные контура. Необходимо удалить мелкие контура, которые априори не могут быть кандидатами дорожных знаков.
Среди выделенных контуров необходимо выделить контура , которые будут объектами интереса. Только цветового признака для определения принадлежности объекта из области интереса к классу дорожных знаков ограничения скорости недостаточно, так как помимо дорожных знаков на изображении могут находиться другие объекты красного цвета (например, автомобили, рекламные доски, автомобильные стоп-сигналы).[3] Второй признак, который можно выделить для всех рассматриваемых дорожных знаков, – форма эллипса очень близкого к кругу. Таким образом, необходимо выделить контура очертания которых представляют окружность. Для поиска окружностей среди выделенных контуров используется теоретически обоснованное преобразование Хафа. В итоге получена область интереса на изображении, то есть сам дорожных знак.
Заключительный этап работы систем автоматического распознавания дорожных знаков посвящен распознаванию дорожных знаков. В целом, существующие для этого методы либо используют предварительно построенные шаблоны, либо основаны на обучении. В первом случае для каждого возможного знака создаются специальные шаблоны, которые помещаются в базу данных, После этого производится сравнение вновь поступившего на вход знака со всеми шаблонами путем вычисления какого-либо расстояния (Евклидова, Махаланобиса и т. п.). Естественно. что при этом необходимо приведение всех знаков к одному и тому же размеру. Однако такой метод обычно обладает значительными ошибками даже при небольшом изменении в цвете и освещенности объектов. Поэтому, вместо того чтобы сравнивать сами знаки, выделяют некие их характерные признаки (гистограммы, сумма проекций и интенсивностей и т. д.), что приводит к повышению надежности распознавания[3].
В конечном итоге система, интегрированная в систему управления автомобилем, должна распознать и идентифицировать определенные дорожные знаки в поле зрения камеры. Дорожные знаки должны соответствовать ГОСТ Р 52290-2004 [6]. В этой системе будем использовать знаки ограничения скорости, они описаны в ГОСТ Р 52290-2004 Приложение А (знак 3.24).
Эта задача усложняется внешними факторами такими, как изменение дневной освещенности, изменение погодных условий, выбор аппаратуры с достаточным качеством и надежностью. Система должна позволять с высокой вероятностью распознать знаки которые установлены криво либо имеют дефекты. Необходимо учесть степень сложности распознавания знаков на большой скорости. При увеличении скорости транспортного средства нагрузку на систему возрастает, так как скорость подачи информативных кадров возрастает и время на распознавание уменьшается.
Литература:
1. Попов Е.Ю., Крыжановский Д.И. Алгоритм распознавания дорожных знаков ограничения скорости // Современные научные исследования и инновации. – Июнь 2012. - № 6 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2012/06/14717 (дата обращения: 26.12.2013)
2. Суслинников А.Д. Системы современного автомобиля [Электронный ресурс].Режим доступа: http://systemsauto.ru/active/traffic_sign_recognition.html свободный (дата обращения: 4.01.2014)
3. «Цифровая обработка видеоизображений» А.А. Лукьяница, А.Г. Шишкин –М.: «Ай-Эс-Эс Пресс» , 2009.-518с.
4. ГОСТ Р 52290-2004 «Технические средства организации дорожного движения. Правила применения дорожных знаков, разметки, светофоров, дорожных ограждений и направляющих устройств».