КЛЮЧЕВЫЕ СЛОВА: фотограмметрии, калибровка, бесконтактные измерения
Резюме
Значительное количество приложений имеет спрос для измерения взаимного расположения двух или более смежных частей. Измерение внешних параметров смежных частей является относительно простой задачей. Но это является проблемой для определения относительного положения внутренней поверхности соседних частей и для измерения заданных параметров соединения. Эта проблема очень важна для стоматологии, где точные измерения относительно верхних и нижних зубов и соответствующее положения (окклюзии) необходимы для эффективного лечения. Для анализа челюсти предлагается Фотограмметрическая техника позиционирования. Она использует оригинальную фотограмметрическую систему для бесконтактного 3D измерения и реконструкции поверхности 3D. Предлагается два метода для построения 3D моделей взаимного расположения зубов в соответствии с их первоначальное положение во рту. Первый метод позволяет определить смещение челюсти относительно набора опорных точек. Второй метод использует сканирование окклюзии зубов для позиционирования челюстей. Оба метода обеспечивают достаточную точность для стоматологии.
1. Введение
Для успешного лечения зубов важно иметь информацию об относительном положении верхней и нижней челюстей и знать расстояние между соответствующими зубами. Определение этих расстояний задача для стоматолога, так как на сегодняшний день не разработано электронной системы для их определения. Стоматолог может получить информацию о позиции зубов, о наличии (или отсутствии) контакт между верхними и нижними зубами. Эта информация может быть получена с использованием тонких листов цветной бумаги, отметив место контакта на зубах при закрытии челюстей. По этой информации уже изготовляется слепок зубной челюсти, который используется для съемки и на основании которого строят цифровую модель челюсти.
Процедура включает в себя несколько этапов. На первом этапе сделана гипсовая модель челюсти. Затем 3D‐модель челюсти генерируются с использованием фотограмметрической системы на основе камеры и проектора структурированного света. Выполняют сканирование модели челюсти, образуя набор частичных моделей, которые затем сливаются с использованием оригинальных программное обеспечение.
Следующим шагом является 3D модель верхней и нижней челюстей в заданной позиции в соответствии с их местоположением и ориентацией во рту. Для этой цели модели слепка устанавливаются в заданную позицию, используя артикуляр или специальные пластиковые формы для установки. Тогда расположение челюстей зарегистрировано. Два метода регистрации разрабатываются и тестируются. Первый Метод использует набор опорных точек на верхней и нижней челюстей. Изображения челюстей захвачены фотограмметрическими системами, а затем рассчитываются 3D координаты опорных точек для взаимного определения местоположения челюстей. Когда установка второго метода поверхности верхней и нижней зубных рядов сканируется в данном положении модели, тогда положение 3D модели челюсти определяется с помощью набора, эта поверхность сканируется в качестве ссылки поверхности с использованием иттерационного алгоритма. Этот метод позволяет проводить необходимый анализ взаимного положения зубов в разное положение челюстей. Стоматолог может изучить взаимное положение зубов и измерять расстояния между данными зубами в различных разделах челюсти. Также этот метод позволяет в изучении того, как протез будут взаимодействовать с другими зубами.
2. Фотограмметрическая система для бесконтактного измерения
2.1 Описание системы
Для поверхностной 3D‐реконструкции используются оригинальные фотограмметрические системы. Система (рис. 2.1) на основе ПК и включает в себя следующее оборудование:
• Две SONY XC‐75 ПЗС‐камеры
• Структурированный луч проектора
• Многоканальный захват кадров

Рисунок 2.1. – Фотограмметрическая система
Система предназначена для стоматологического применения и должна обеспечивать точность измерений около 0,04 мм. Для решения этого требования с заданной камеры рабочего пространства система выбрана в качестве 160x160x160 мм. Камеры используются для бесконтактного измерения 3D поверхностных координат с использованием фотограмметрического подхода. Для автоматизированной идентификация данной точки поверхности используются изображения с левой и правой камер (решение проблемы соответствия).
2.2 Калибровка системы
Метрические характеристики 3D моделей, выпускаемых системой, предоставляет система калибровки. Процедура Калибровки дает оценку внутреннего ориентирования на основе набора изображений специальных полевых испытаний с известными пространственными координатами опорных точек. Проблема определения параметров решается оценкой неизвестных параметров на основе наблюдений. Дополнительный термин, описывающий нелинейные искажения в коллинеарном уравнении для перспективных проекций принимаются в форме:

где XP, YP – координаты главной точки,
Mx, My – веса в направлениях х и у,
а – аффинный коэффициент,
К1, К2, К3 – коэффициенты радиальной симметрии искажения
P1, P2 – коэффициенты искажения децентрирования
Ориентация изображения интерьера и ориентации внешнего образа (Xi,Yi, Zi – расположение и α, ω, κ – угловое положение в данной системе координат) определяются в результате калибровки.

Рисунок 2.2. – Калибровка полевых испытаний на этапе позиционирования
Процесс калибровки полностью автоматизирован за счет применения двух осей этапов позиционирования и кодированных целей для опорной точки маркировки. Программа калибровки собирает набор изображений тестовых полигонов в другую позицию и контролирует этап позиционирования (рис. 2.2). Оригинальное программное обеспечение для калибровки контролирует полевые измерения для ориентирования полученных изображений и полевых испытаний захвата изображения при заданной позиций. Тогда параметры ориентирования камеры оцениваются на основе пунктов опорного изображения, а также координирует наблюдения точек с известными пространственными координатами.
3. Регистрация окклюзии с использованием базовых точек
3.1 Модель установки
Первый способ для регистрации окклюзии направлен на регистрацию относительного смещения верхней и нижней челюстей. Он использует набор опорных точек на верхней и нижней челюсти, которые определяются в локальной системе координат каждой челюсти. Стереопара модели слепка челюсти с опорными точками показана на рисунке 3.1.Четыре опорные точки (№ 1‐№ 4) на нижней челюсти и четыре точки для ориентирования (№ 5‐№ 8) используются для анализа окклюзии. Ориентировочные точки отмечены как кодированные цели для точной автоматической идентификации точки и субпикселей измерения.
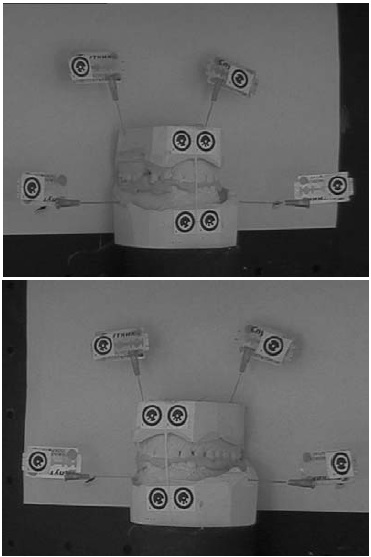
Рисунок 3.1 – Стереопара гипсовой модели челюсти с ориентировочными точками
4. Наземная регистрация окклюзии
4.1 Гипсовые модели сканирования
Фотограмметрические системы позволяют измерять 3D координаты любой точки на поверхности объекта при наблюдении двумя камерами одновременно. Для объектов сложной формы, такой как челюсть, гипсовая модель неудобна, чтобы просмотреть все необходимые точки объекта. Таким образом, множество частичных сканирований объекта должно быть получено на всей поверхности объекта. Любая частичная проверка объекта существует в ее местной системе координат, указанной во время полевых испытаний. Два частичных сканирования гипсовой челюстью представлены на рисунке 4.1.
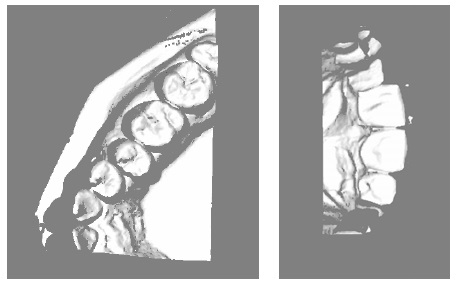
Рисунок 4.1 – Два частичных сканирований челюсти
Для построения целой 3D модели из набора сканирований может быть применено несколько методов, например задание точки сети проектирования, применяя именно стадии позиционирования с известным положением оси (BESL, 1992). Для создания целой 3D модели верхней челюсти представлен набор 28 сканирований (рис. 4.2). Различные сканирования показаны в разных цветах, чтобы визуально контролировать качество слияния. Средняя ошибка сканирования слияние на уровне 0,02 мм.
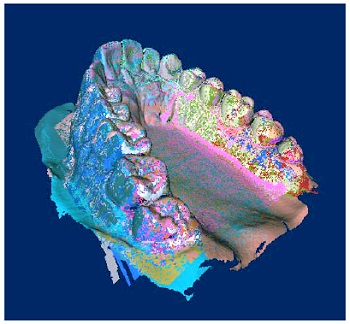
Рисунок 4.2. – 3D‐модель верхней челюсти из 28 сканирований
Полученные 3D модели, состоящие из значительного числа перекрытий поверхности не подходят для целей анализа окклюзии челюсти. Так что эта 3D‐модель превращается в одну сетку с использованием алгоритма интерполяции сетки (Curless, 1996).Результат одного использания сетки показан на рисунке 4.3.
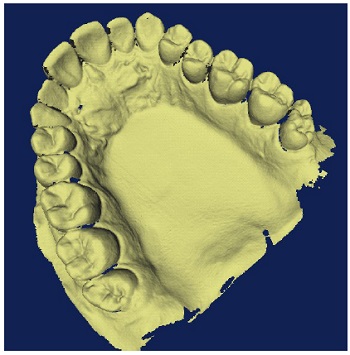
Рисунок 4.3. – 3D‐модель челюсти в одной сетке
5. Анализ
3D модели челюсти, установленные в положении в соответствии с их реальной окклюзией позволяют исследовать невидимые поверхности зубов, что является важным для лечения зубов и производства протезов. Для анализа окклюзии разработан оригинальный программный продукт. Он поддерживает следующие функции:
• 3D визуализация модели в различных режимах,
• принятие данной плоскости раздела 3D‐модели,
• Раздел визуализации контуров в формы 2D‐ или 3D‐кривых
• Измерение данных показателей в плоскости сечения.
Рисунок 5.1 представляет пользователю интерфейс разработанного программного обеспечения.
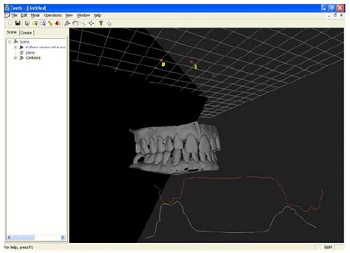
Рисунок 5.1 – Пользовательский интерфейс программного обеспечения
Пользователь может сделать раздел ручного определения положения плоскости или он может выбрать антропометрическими точками на зубах и анализировать окклюзии в плоскости, соответствующие этим точкам.