In work are submitted some results of researches step by step converter for regulate of voltage on DC link on enter of inverter of voltage. Such construction of power circuits allows to supply the standart asynchronous machine from a low-voltage sourse. Researches were carried out at use of package Simulink and Power System Blockset of MATLAB.
Использование в асинхронном электроприводе (АЭП) транзисторных преобразователей частоты (ПЧ) в сочетании с новыми методами частотного управления практически снимает все ограничения на его применение. Это относится и к установкам, где традиционно используется привод постоянного тока, в частности, тяговый электропривод, что позволяет улучшить его эксплуатационные характеристики и надежность [1]. Выходное напряжение автономного инвертора напряжения (АИН) определяется напряжением в звене постоянного тока. В связи с этим часто возникает проблема согласования напряжения источника и асинхронного двигателя (АД), особенно при использовании в качестве источника – аккумуляторной батареи (АБ). Ее напряжение может быть от 43 до 185 В в зависимости от типа электровоза [2]. Например, на шахтном электровозе АМ-8 установлена АБ типа 112ТНЖШ-500. При ее использовании максимально возможное линейное напряжение на выходе АИН составит Uл.мах =Е * 0,707 = 135 * 0,707 = 95 В (Е = 135В – среднее напряжение АБ при 5-часовом разряде [2]).
Решение проблемы возможно при использовании АД на стандартное напряжение 660 / 380 В, который питается через повышающий трансформатор от АИН или специального вентильно-трансформаторного инвертора [1], а также при использовании нестандартного двигателя на пониженное напряжение.
Несложные расчеты показывают, что при использовании АД равноценной мощности на пониженное напряжение его ток увеличивается в 2,5-4,4 раза в сравнении с двигателем, рассчитанным на стандартное напряжение. Поскольку выходная мощность АИН одного класса напряжений определяется его выходным током, это означает соответствующее завышение мощности (габаритов) и стоимости преобразователя.
Вместе с тем использование схем, содержащих трансформатор, который рассчитан на полную мощность двигателя – решение громоздкое и практически неприемлемое, при этом мощность АИН также завышена.
Поскольку проблема связана с применением транзисторного преобразователя, то можно пойти на его некоторое усложнение – введение промежуточного импульсного преобразователя (ИП) для регулирования напряжения в цепи постоянного тока.
Целью работы является использование в схеме промежуточного ИП, как регулируемого источника постоянного напряжения для согласований напряжений в звене постоянного тока и АД, что позволяет использовать АИН соответствующий паспортной мощности двигателя. Это также позволяет улучшить форму тока, потребляемого от АБ, и гармонический состав выходного напряжения АИН при сочетании амплитудного и широтно-импульсного регулирований выходного напряжения АИН.
При этом нужно решить следующие задачи:
- обосновать расчет параметров схемы ИП двухсторонней проводимости для реализации двигательного и генераторного режимов работы при заданных показателях качества его выходного напряжения и потребляемого тока;
- исследовать статические регулировочные характеристики ИП с учетом реальных параметров силовых цепей;
- исследовать динамические свойства ИП как объекта регулирования;
- разработать систему управления, обеспечивающую регулирование напряжения в двигательном и в генераторном режимах работы ИП.
Предлагаемая схема преобразователя изображена на рисунке 1. В сравнении с прямым питанием низковольтного АД, где для сглаживания пульсаций тока, потребляемого АИН от АБ, установлен LC-фильтр, в схему добавлены два IGBT (VT1 и VT2) с обратными диодами (VD1 и VD2). При этом схема ИП обеспечивает двусторонний обмен энергией в двигательном и генераторном режимах работы.
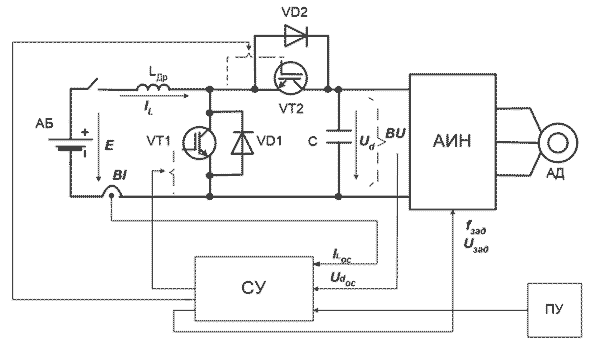
Рисунок 1 – Схема преобразователя частоты с промежуточным ИП
В двигательном режиме ИП обеспечивает возможность повышения напряжения на входе инвертора. Для этого используется ключ VT1 с диодом VD2, а ключ VT2 – заперт. Во время открытого состояния транзисторного ключа (VD2-заперт обратным напряжением) ток IL через дроссель (Др) нарастает, и энергия в нем накапливается. Во время закрытого состояния VT1 энергия, запасенная в магнитном поле дросселя, передается через диод VD2 на конденсатор С (в нагрузку), увеличивая тем самым напряжение Ud на ней. Переключение транзисторов обеспечивает система управления (СУ), которая поддерживает заданное значение напряжения на входе АИН, в соответствии с сигналом, поступающим с пульта управления (ПУ).
Если использовать широтно-импульсный метод регулирования ИП, то при постоянной частоте коммутации VT1 fк (период коммутации – Tк = 1 / fк) и коэффициенте заполнения импульсов D = tвкл fк (tвкл – продолжительность времени включенного состояния транзистора VT1) возможны три режима работы схемы (рисунок 2).
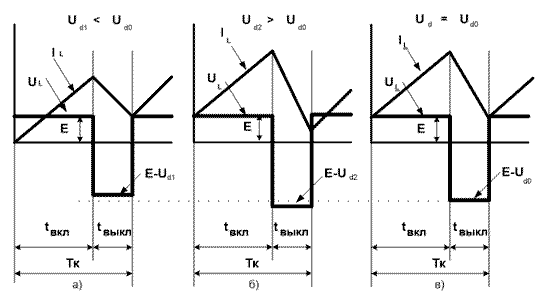
Рисунок 2 – Режимы работы повышающего ИП:
а) неустановившийся режим непрерывно нарастающего тока;
б) неустановившийся режим непрерывно убывающего тока;
в) установившийся режим.
Как видно из рисунка 2, напряжение на дросселе UL во время tвыкл (закрытое состояние ключа VT1) зависит от выходного напряжения Ud. Процессы, изображенные на рисунках 2,а и 2,б, характерны для неустановившихся режимов работы ИП, когда напряжение на его выходе Ud не равно установившемуся значению Udo, и, следовательно, среднее значение тока IL – непостоянно (нарастает или убывает). Когда же напряжение Ud = Udo наступает установившийся режим (рисунок 2,в), при этом значения тока IL в начале и в конце периода коммутации – равны.
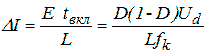
Значение амплитуды пульсаций входного тока АБ в установившемся режиме могут быть определены исходя из того, что при замкнутом состоянии ключа VT1 напряжение источника Е уравновешивается только ЭДС в индуктивности дросселя L (для упрощения полагаем, что ток IL изменяется по линейному закону):
 |
(1) |
Частота коммутации ƒk не должна превышать 5-10 кГц, поскольку при ее значении большем 10 кГц, значительно возрастают потери переключения в транзисторе. Чтобы не увеличивать габариты дросселя, его индуктивность L выбирается не более 1-2 мГн. Этого достаточно, чтобы уровень пульсаций тока не превышал 5-10% от номинального значения тока IL, которое определяется величиной мощности двигателя.
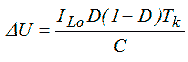
Аналогично можно определить значение пульсаций напряжения ΔU на емкости С, исходя из того, что накопленная в дросселе энергия переходит в виде заряда Q в емкость, а затем, когда батарея зашунтирована ключом VT1, этот же заряд потребляется нагрузкой из емкости.
 |
(2) |
– где ILo – среднее значение входного тока ИП, в номинальном режиме работы электропривода;
Из (2) можно сделать вывод о том, что при прочих равных условиях (D, Tk) значение емкости конденсатора должно соответствовать току IL и соответственно значению мощности АД. К примеру, при мощности АД Р = 22 кВт, ЭДС АБ Е = 135 В и напряжении на выходе АИН Ud = 566 B, емкость конденсатора составит 60…100 мкФ. При этом пульсации напряжения в емкости составят 30…60 В.
Если пренебречь потерями в схеме, среднее значение напряжения в установившемся режиме работы ИП на его выходе, согласно [3], при использовании широтно-импульсного метода регулирования определяется по формуле:
 |
(3) |
При этом регулировочная характеристика имеет вид, изображенный на рисунке 4 (кривая 1).
Для оценки реальных возможностей схемы с ИП необходимо учесть потери в ней, определяющиеся эквивалентным сопротивлением цепи R∑. Оно включает: сопротивление дросселя, сопротивление транзистора (диода) и внутреннее сопротивление АБ. Поскольку последняя набрана из большого числа элементов, то ее внутреннее сопротивление достаточно велико и включает в себя сопротивление токоведущих деталей (электролита, электродов, перемычек и др.) и поляризационное сопротивление. Так для АБ типа ТНЖ(К)Ш внутреннее сопротивление можно принять равным RАБ≈0.1 Ом [2].
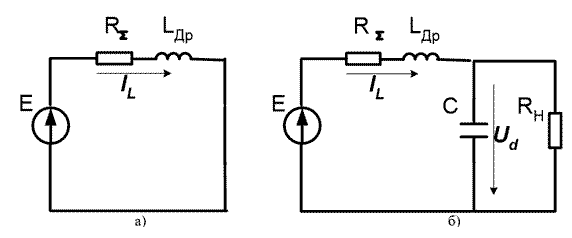
Рисунок 3 – Схема замещения повышающего ИП
а) VT1 – открыт; б) VT1 – заперт.
Для реального ИП, схема замещения которого приведена на рисунке 3, с учетом того, что напряжение на его входе изменяется в зависимости от величины IL входного тока преобразователя, формула (3) примет вид:
 |
(4) |
При этом максимально возможное значение напряжения на выходе ИП имеет место если:
 |
(5) |
На рисунке 4 представлены расчетные регулировочные характеристики ИП, в соответствии с (4), при различных значениях Rн. Эквивалентное сопротивление цепи можно принять R∑ = 0,15 Ом с учетом сопротивления ДР Rдр = 5-10 мОм [4] (типа ФРОС-65/0,5У3), сопротивлений ключей схемы, а также внутреннего сопротивления АБ. Сопротивление Rн определяется как эквивалентное сопротивление, соответствующее мощности нагрузки ИП (исходя из номинальной мощности АД).
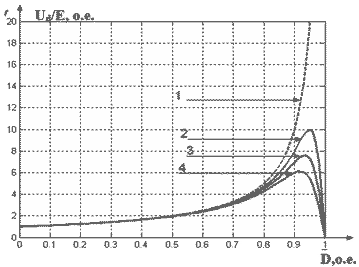
Рисунок 4 – Регулировочные характеристики ИП
при R∑ = 0,15 Ом и различной нагрузке:
1 – холостой ход, 2 – РН = 12 кВт, 3 – РН = 22 кВт, 4 – РН = 30 кВт.
Из рисунка 4 видно, что при Ud/E ≤ 4 регулировочные характеристики ИП практически идентичны, что говорит о незначительном влиянии потерь на его работу. Однако, при Ud/E ≥ 4 характеристики расходятся, обладая четко выраженным максимумом. Этот факт свидетельствует о том, что возможности реальной схемы ограничены, и выходное напряжение преобразователя на этом участке в значительной степени зависит от мощности нагрузки РН. Это происходит по той причине, что сопротивление R∑ влияет на величину входного напряжения ИП Uвх = Е - IL R∑, а величина мощности нагрузки РН на величину тока IL в соответствии с формулой:
 |
– где  – коэффициент передачи ИП.
– коэффициент передачи ИП.
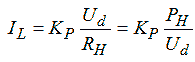
Для того чтобы обосновать построение системы управления ИП, нужно оценить его работу без использования методов автоматического регулирования (в разомкнутой системе). Переходные процессы изменения выходного напряжения Ud и потребляемого от АБ тока IL ИП, работающего на активную нагрузку различной мощности, при отработке одного и того же скачкообразного сигнала задания , соответствующего коэффициенту заполнения импульсов D = 0,75, представлены на рисунке 5. Из рисунка видно, что с изменением РН изменяются не только статические показатели параметров (Ud, IL), но и динамические (колебательность, перерегулирование). Так для мощности нагрузки Рн = 17 кВт перерегулирование σ = 25%, а для Рн = 10 кВт – σ = 50%. Следовательно, с увеличением нагрузки на ИП перерегулирование при отработке задающего управляющего воздействия – уменьшается, уменьшается и колебательность.
Рисунок 5 – Реакция ИП на одинаковое управляющее воздействие при различном его нагружении:
а) Рн = 10 кВт; б) Рн = 17 кВт.
Различной динамикой ИП обладает также при отработке различных управляющих воздействий, в качестве которых выступает коэффициент D. На рисунке 6 представлены осциллограммы реакции ИП, работающего на одинаковую нагрузку, при различных задающих воздействиях. Из рисунка 6 видно, что изменение D еще в большей степени влияет на динамику преобразования постоянного напряжения ИП.
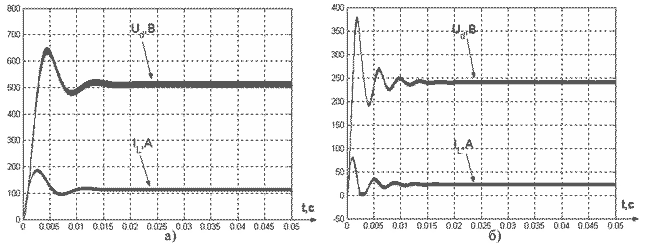
Рисунок 6 – Отработка ИП различных управляющих воздействий
а) D = 0,75; б) D = 0,45
Так как изменяющееся напряжение Ud (4) за счет возмущающего воздействия (нагрузка), фактически является входным для АИН, то для его поддержания на заданном уровне предполагается использование системы автоматического регулирования (САР), замкнутой по напряжению. Кроме того, как видно из рисунков 5 и 6, входной ток ИП IL обладает большим быстродействием (время первого согласования с установившимся значением – меньше), в сравнении с напряжением Ud. Поэтому для улучшения качества регулирования САР целесообразно выполнять с внутренним контуром регулирования входного тока и внешним контуром регулирования выходного напряжения.
Из выше сказанного, можно сделать вывод о том, что ИП с широтно-импульсным регулированием имеет множество факторов, влияющих на его динамику и статику, и реализация САР с применением линейных регуляторов входного тока и выходного напряжения – затруднительно. Кроме того, в преобразователе отсутствует прямая связь между Ud и IL, что затрудняет процесс регулирования.
Как показал анализ, более эффективным в сравнении с ШИМ методом регулирования напряжения на выходе ИП является управление с помощью релейного регулятора. При этом нужно отметить, что при использовании релейного регулятора с непосредственным управлением выходным напряжением, удается частично достичь результата. Однако при этом необходимо использовать вычисление величины отклонений пульсаций напряжения в соответствии с (2). В противном случае, схема перейдет в неустановившийся режим работы и, как следствие, произойдет неуправляемый рост входного тока до величины ILКЗ = Е / R∑. Это произойдет потому, что с изменением D нарушается равновесие Ud = Udo, и преобразователь входит в неустановившийся режим.
Однако даже при условии вычисления во времени отклонения напряжения ΔU в соответствии с (2) с последующим занесением результата в регулятор, регулирование не дает результата, потому что эта формула определяет установившееся значение пульсаций напряжения, а в динамике такой вариант не подходит.
Как показали исследования, вариант построения САР с ПИ-регулятором напряжения (РН) и релейным регулятором входного тока дает лучшие результаты. Модель САР представлена на рисунке 7.
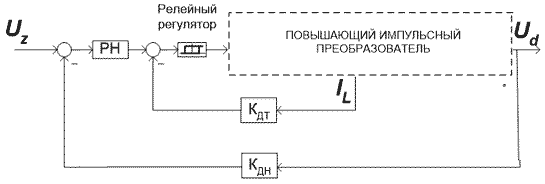
Рисунок 7 – Модель САР повышающего ИП
Регулятор напряжения настраивается таким образом, чтобы скомпенсировать постоянную времени выходной цепи ИП T = RнC. Кроме того, этот регулятор ограничивает максимально возможный разрядный ток АБ (имеет ограничение на выходе).
Релейный регулятор тока выполнен с постоянным отклонением ±ΔI и отрабатывает сигнал задания, поступающий с регулятора напряжения, формируя,
так называемый, токовый коридор
. Такой тип регулятора обеспечивает поддержание тока на заданном уровне
ILзад ± ΔI.
Переходные процессы отработки линейного закона управления повышающим ИП, в котором входной ток и выходное напряжение регулируются при помощи САР, представлены на рисунке 8,а.
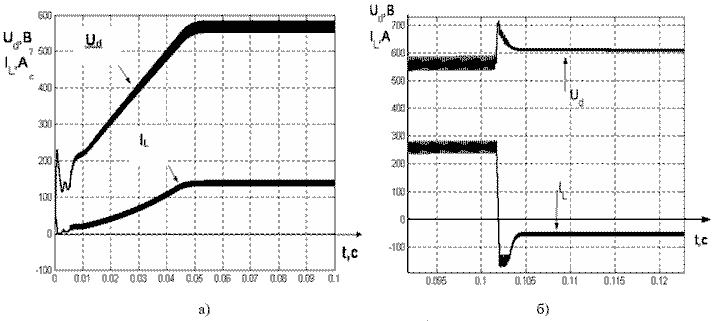
Рисунок 8 – Переходные процессы работы ИП с САР:
а) при отработке линейного закона управления в двигательном режиме;
б) при переходе ИП в генераторный режим.
Таким образом, регулирование напряжения Ud, являющегося входным для АИН, может осуществляться по линейному закону с достаточно высоким темпом изменения (постоянная времени интегрирования задающего сигнала Tи = 50 мс). Этот факт обуславливает возможность сочетания амплитудного и широтно-импульсного регулирований в ПЧ с промежуточным звеном повышенного напряжения, а, следовательно, улучшить гармонический состав его выходного напряжения на низких частотах.
При увеличении выходного напряжения ИП до некоторого порогового значения Uп = Udзад_д + ΔU (Udзад_д – напряжение задания в двигательном режиме), ключ VT1 – запирается, а VT2 работает в сочетании с VD1, образуя схему понижающего ИП.
Работа понижающего ИП осуществляется отпиранием VT2 (рисунок 1). При этом энергия, накопленная в емкости С, отдается в АБ, осуществляя ее заряд. При запирании ключа VT2, энергия накопленная в Др стремится поддержать ток в том же направлении, замыкаясь в контуре Др-АБ-VD1. Таким образом, обеспечивается постоянство зарядного тока в АБ.
Линейная зависимость между входным и выходным напряжением понижающего ИП [3] позволяет использовать для регулирования зарядного тока как широтно-импульсный, так и релейный методы регулирования. Для упрощения САР, управляющую переключением транзистора VT2, желательно выполнить с внутренним релейным регулятором тока и внешним ПИ-регулятором напряжения с переменной структурой. При этом задающий сигнал на напряжение Udзад_г (генераторный режим) поступает в САР несколько завышенным в сравнении с Udзад_д, а регулятор напряжения формирует сигнал задания на зарядный ток, используя область отрицательных значений.
Переходные процессы перехода ИП в генераторный режим представлены на рисунке 8,б.
- Произведенный анализ статических и динамических свойств ИП с учетом реальных параметров силовых цепей подтверждает возможность реализации преобразователя частоты с промежуточным звеном повышенного напряжения в асинхронном частотно-регулируемом электроприводе.
- В работе обоснованы параметры ИП (индуктивность дросселя и емкость конденсатора), которые позволяют обеспечить требуемые показатели качества входного тока и выходного напряжения ИП.
- Предложенная структура САР с внутренним релейным регулятором тока и внешним ПИ-регулятором напряжения для регулирования выходного напряжения ИП в двигательном и генераторном режиме работы электропривода, позволяет использовать в преобразователе частоты сочетание амплитудного и широтно-импульсного регулирования, что дает возможность улучшить гармонический состав напряжения и соответственно тока двигателя на малых частотах.
ЛИТЕРАТУРА
1. К. Н. Маренич, В. Н. Ставицкий, А. И. Самойлов. Обоснование технических решений для создания асинхронного частотно-регулируемого
электропривода шахтного аккумуляторного электровоза. // Донбас-2020: наука і техніка – виробництву: Матеріали науково-практичної конференції.
м. Донецьк, 05-06 лютого 2002 р. – Донецьк, ДонНТУ Міністерства освіти і науки, 2002. – 700 с.
2. С. А. Волотковский. Рудничная электровозная тяга. 4-е изд., перераб. И доп. М.: Недра, 1981. – 389 с.
3. N. Mohan, T. M. Underland, W. P. Robbins. Power electronics: converters, applications and design. – 2nd ed., USA., 1995.
4. Комплектные тиристорные электроприводы: Справочник; под ред. В. М. Перельмутера. – М.:Энергоатомиздат, 1988 г. – 319 с.