Основные компоненты прямоприводной ветроэнергетической системы синхронного генератора с постоянными магнитами (СГПМ) являются ветровая турбина и СГПМ. Ветровая турбина захватывает энергию ветра для системы, а СГПМ преобразует механическую энергию в электрическую энергию. В этой главе будут представлены основные принципы выработки электроэнергии, а также будут разработаны и проанализированы математические модели ветротурбины и СГПМ. Это будет способствовать дальнейшему пониманию алгоритмов управления.
2.1 Моделирование ветровой турбины
Для того чтобы исследовать эффективность преобразования энергии ветра, в первую очередь, необходимо определить доступную энергию, запасенную в ветре. На самом деле, ветровую энергия можно рассматривать как кинетическую энергию большого количества частиц воздуха с общей массой, m, со скоростью движения ветра, Vw. Предполагая, что все частицы воздуха движутся с той же скоростью и направлением, прежде чем воздействовать на лопасти ветряной турбины, накопленный потенциал кинетической энергии ветра может быть выражен в соответствии со следующей формулой:
 |
(2.1) |
где Е – кинетическая энергия движущихся частиц воздуха, m – общая масса частиц воздуха, в то время Vw является скоростью частиц воздуха (скорость ветра). Поскольку частицы воздуха движутся со скоростью Vw, общая масса частиц – m, в течение периода времени t, можно переписать следующим образом:
 |
(2.2) |
где ρ – плотность воздуха, и A является ометаемой площадью ветровой турбины. Здесь r – радиус ветрового колеса. Подставляя (2.2) в (2.1), кинетическая энергия частиц воздуха может быть выражено следующим образом:
 |
(2.3) |
Из выражения (2.3), фактическая энергия ветра в любой момент времени может быть представлена в виде:
 |
(2.4) |
где Pwind – потенциально доступная мощность ветра. Из выражения (2.4), мы можем наблюдать, что энергия ветра пропорциональна кубу скорости ветра, а это означает, что небольшое увеличение скорости ветра приведет к значительному увеличению энергии ветра. Кроме того, мощность может быть увеличена за счет увеличения радиуса ветрового колеса, так как мощность пропорциональна квадрату этого радиуса ротора. Это является причиной того, что все больше и больше крупных систем ветротурбин (до 10 МВт) исследуются и рассматриваются в настоящее время.
Тем не менее, мощность, показанная в выражении (2.4) может стоять только для максимальной потенциальной мощности, которая доступна, когда ветер со скоростью Vw, проходит через область ветрового колеса с радиусом r. На самом деле, только часть этой потенциально доступной мощности может быть захвачена ветротурбиной. В 1919 году немецкий ученый Альберт Бец попытался выразить действие частиц воздуха (ветра), проходящих через ветротурбину [1]. По идее Бетца, после воздействия на лопасти турбины, скорость ветра уменьшается от Vw к Vw2, что означает когда ветер проходит через лопасти турбины, некоторая кинетическая энергия все еще остается в частицах ветра. Отношения между энергией, захваченной ветротурбиной и потенциально максимальной энергией ветра может быть выражена следующим образом:
 |
(2.5) |
где Pturbine является механическая мощность, захваченная ветротурбиной, и Cp – коэффициент мощности ветровой турбины, который может быть выражен следующим образом [2]:
 |
(2.6) |
где
 |
(2.7) |
и
 |
(2.8) |
где β – угол поворота лопасти, который показан на рисунке 2.1, а λ представляет собой отношение скорости наконечника лопасти турбины, а ωm – угловая скорость генератора ветротурбины. Значения коэффициентов (с1∼с6), зависят от типа ветротурбины.
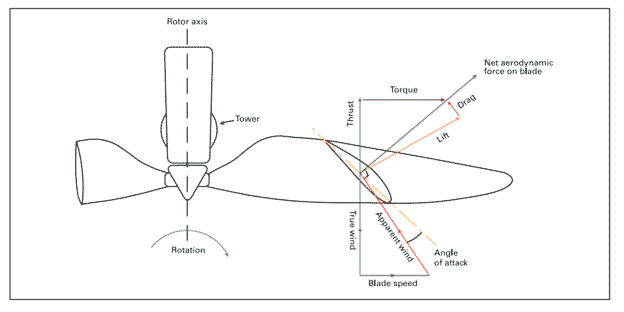
(а). Угол лопасти схематическая диаграмма
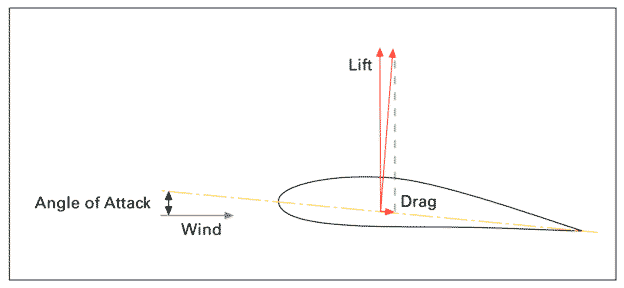
(b). Силы сопротивления и подьема лопасти
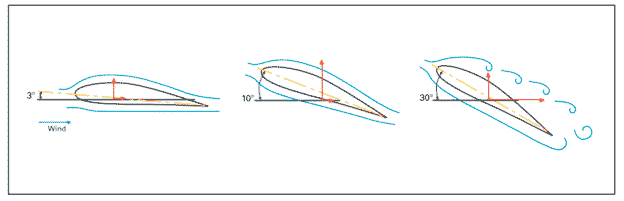
(c). Лопасть при низких, средних и больших углах поворота
Рисунок 2.1 – Схема угла поворота лопасти ветротурбины [3]
Как видно на рисунке 2.1, угол β указывает на то, как же скорость ветра воздействует на лопасти ветровых турбин. Угол поворота лопасти – это угол между ориентацией лопасти и вектора скорости ветра. Когда β = 0, на лопасть полностью влияет скорость ветра, а ветровая турбина будет фиксировать максимальную мощность ветра. Угол лопасти обычно фиксируется нулевым, когда скорость ветра ниже номинальной скорости ветросистемы, чтобы обеспечить высокую эффективность захвата энергии. Когда скорость ветра становится больше номинального значения, мощность, захватываемая системой будет превышать номинальную мощность, если угол β останется нулевым. Из-за этого генератор и силовые устройства будут работать выше номинальной мощности, что является вредным для системы, особенно, если этот режим будет продолжаться в течение длительного времени. На основе этого, система управления углом поворота лопасти в зависимости от различных условий ветра необходим для ветровой турбины. Соответственно, мощность, захваченную ветротурбиной, можно переписать следующим образом:
 |
(2.9) |
2.2 Моделирование синхронных машин с постоянными магнитами
Синхронные машины с постоянными магнитами (СМПМ) играют ключевую роль в прямоприводных системах генерации энергии ветра для преобразования механической энергии в электрическую. Строгое математическое моделирование СМПМ является предпосылкой для разработки алгоритмов управления машиной, а также анализа статических и динамических характеристик систем преобразования энергии ветра. В этом разделе будет разработана математическая модель СМПМ как в естественном abc трехфазной стационарной системы отсчета и dq синхронно-вращающейся системе отсчета, а также будет сделан анализ мощности и крутящего момента СМПМ
2.2.1 Моделирование СМПМ в естественной аЬс трехфазной системе координат
Перед разработкой математической модели СМПМ, нужно сделать несколько важных предположений:
(1) эффект затухания в магнитах и в роторе пренебрежимо
мал;
(2) магнитными эффектами насыщения можно пренебречь;
(3) потери от вихревых токов и гистерезиса не учитываем;
(4) электродвижущая сила (ЭДС), индуцированного в обмотке статора являются синусоидальной;
(5) для простоты, все уравнения СМПМ выражаются
в двигательном режиме (потребитель/нагрузки), то есть отрицательный ток будет преобладающей, когда машина работает в генераторном режиме.
Отрицательный ток означает, что при положительном подключении устройства ток будет двигаться в обратном направлении.
На рисунке 2.2 показан вид в поперечном сечении трехфазного двухполюсного СДПМ. Неподвижные оси обозначают abc направление потоков (fa, fb и fc) от a, b и c фазных обмоток, которые индуцируются изменяющегося во времени трехфазного переменного тока в фазах обмоток статора. Поток обусловлен постоянным магнитом в направлении d-оси, закрепленной на роторе. Здесь, dq-осей вращаются с одинаковой угловой скоростью ПМ и ротора. Кроме того, θr обозначает угол между осью d и статической осью α.
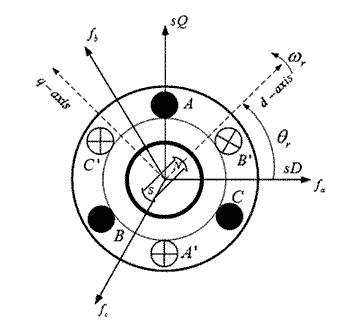
Рисунок 2.2 – Поперечное сечение СДПМ [4]
Отношение пространства состояний концевых напряжениях СДПМ к фазным токам и фазным потокам, обусловленного ПМ и токами статора можно записать следующим образом [5]:
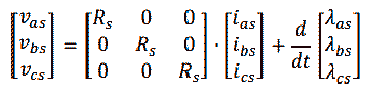 |
(2.10) |
Где vas, vbs, и vcs являются мгновенными a, b, и c-фазными напряжениями статора, и ias, ibs, и ics мгновенные фазные токи статора. Rs – фазное сопротивление обмотка статора, и λas, λbs и λcs – мгновенные потокосцепления, индуцированные трехфазным переменным током и ПМ, которые могут быть выражены в развернутом виде следующим образом [5]:
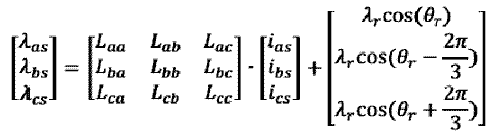 |
(2.11) |
где Laa, Lbb, и Lcc – самоиндукция в трех фазах a, b, и c, и Lab, Lac, Lba, Lbc, Lca, и Lcb – взаимная индуктивность между этими фазами, также λr – потокосцепление ротора, вызванное постоянным магнитом. Самоиндукции и взаимные индуктивности являются функциями θr. Таким образом, все индуктивности – параметры изменяемые во времени.
2.2.2 Моделирование СДПМ в dq синхронно-вращающейся системе координат
Преобразование Парка dq0 – математическое преобразование, которое ставит своей целью упростить анализ синхронных моделей машин, и впервые был введен Р. Г. Парком в 1929 году [6]. В трехфазных системах, таких как СДПМ, фазовые величины, которые включают в себя напряжения статора, токи статора и магнитные потоки являются величинами изменяемыми во времени. Применяя преобразование Парка, которое по своей сути проекцирует фазовые величины на вращающиеся координаты двух осей отсчета величин переменного тока в величины постоянного тока, которые не зависят от времени. Трансформация abc к dq0 может быть выражено в матричной форме следующим образом:
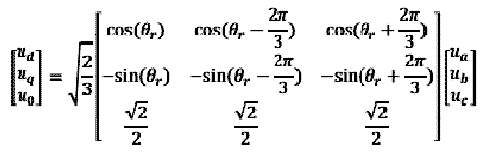 |
(2.12) |
Обратная трансформация парка заключается в следующем:
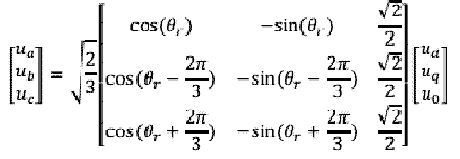 |
(2.13) |
В выражениях (2.12) и (2.13), uabc и udq0 может представлять напряжения статора, токи статора или магнитные потоки соответственно машин переменного тока. Принимая во внимание, что при сбалансированных условиях, u0=0, то функции напряжения СДПМ в dq-системе координат могут быть выражены следующим образом [5]:
 |
(2.14) | |
 |
(2.15) |
Где vds и vqs – мгновенные напряжения статора в dq-системе координат, а также ids и iqs являются мгновенными токами статора в dq-системе. Ld и Lq являются d- и q-индуктивностями, ωe – электрическая угловая скорость ротора, в то время как λ – пик/максимальный фазный поток, возникающий в роторе из-за ПМ. В соответствии с выражениями (2.14) и (2.15), эквивалентные схемы в СДПМ в dq-системе координат можно сделать, как показано на рисунке 2.3:
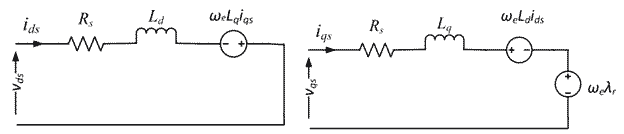
Рисунок 2.1 – dq-эквивалентная схема в СДПМ
2.2.3 Анализ мощности и крутящего момента СДПМ
Для любого СДПМ, электрическая потребляемая мощность может быть выражена в abc-системе координат следующим образом:
 |
(2.16) |
или в dq-системе следующим образом:
 |
(2.17) |
Как часть входной мощности в двигательном режиме активная мощность – это энергия, которая преобразуется из механической энергию с помощью машины, может быть выражена следующим образом:
 |
(2.18) |
где
 |
(2.19) |
и
 |
(2.20) |
Здесь ed и eq – противо-ЭДС в dq-системе координат, λd и λq – dq-потокосцепления. Подставляя выражения (2.19) и (2.20) в (2.18), активная мощность может быть повторно выражена следующим образом:
 |
(2.21) |
Следовательно, электромагнитный момент, развиваемый в СДПМ можно вывести следующим образом:
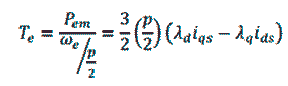 |
(2.22) |
или
 |
(2.23) |
где р – число полюсов в машине.
Список использованной литературы
1. Betz, Albert. "Behavior of vortex systems." (1933).
2. T. Sun, Z. Chen, and F. Blaabjerg, "Voltage Recovery of Grid-Connected Wind Turbines After a Short-Circuit Fault," Proc. of the 29th Annual
Conference of the IEEE Industrial Electronics Society, vol. 3, June 20-25, 2004, pp. 827-831.
3. "WE Handbook-2-Aerodynamics and Loads", available: http://www.gurit.com
4. M. Singh, Adaptive Network-Based Fuzzy Inference Systems for Sensorless Control of PMSG Based Wind Turbine With Power Quality Improvement Features.
(Doctoral dissertation). Retrieved from ProQuest Dissertation and Thesis.
5. A. E. Fitgerald, J. C. Kingsley, and S. D. Umans, Electric Machinery. New York: McGraw-Hill, 1990.
6. R. M. Park, “Two-reaction theory of synchronous machines, pt. I: Generalized method of analysis,” AIEE Trans., vol. 48, pp. 716–730,
July 1929.