Аннотация
Светличный А.В. Выравнивание нагрузок в двухдвигательном электроприводе. Двухдвигательные электроприводы широко используются в металлургической промышленности. Одной из наибольших проблем в их эксплуатации является неравномерность загрузки. Как пример такого случая, представлены диаграммы токов главного привода прокатного стана 1150. Это рассогласование связано с различными скоростными характеристиками двигателей. Для избежания рассогласования загрузок необходимо регулирование токов возбуждения. Приведены уравнения для расчета регулирующих воздействий.
Двухдвигательный электропривод широко используется в металлургической промышленности для таких механизмов, как прокатные клети, вращающиеся печи, ножницы и т.д. Основной проблемой при наладке и эксплуатации таких электроприводов является неравномерное распределение моментов между электродвигателями, приводящее к перегрузке одного из них, а также к неравномерному износу элементов кинематической передачи - шестерен редукторов, шпинделей и пр.
Для двухдвигательных электроприводов постоянного тока лучшие свойства по выравниванию нагрузок имеет схема с последовательным соединением якорей. Однако, такая схема требует использования тиристорного преобразователя с удвоенным выходным напряжением и как показано в [1] обладает худшими демпфирующими свойствами по сравнению со схемой с параллельно включенными якорями электродвигателей. На (рис.1) представлена силовая схема электропривода вертикальной клети прокатного стана 1150, в которой каждый валок приводится в движение двухдвигательным электроприводом через суммирующий понижающий редуктор.
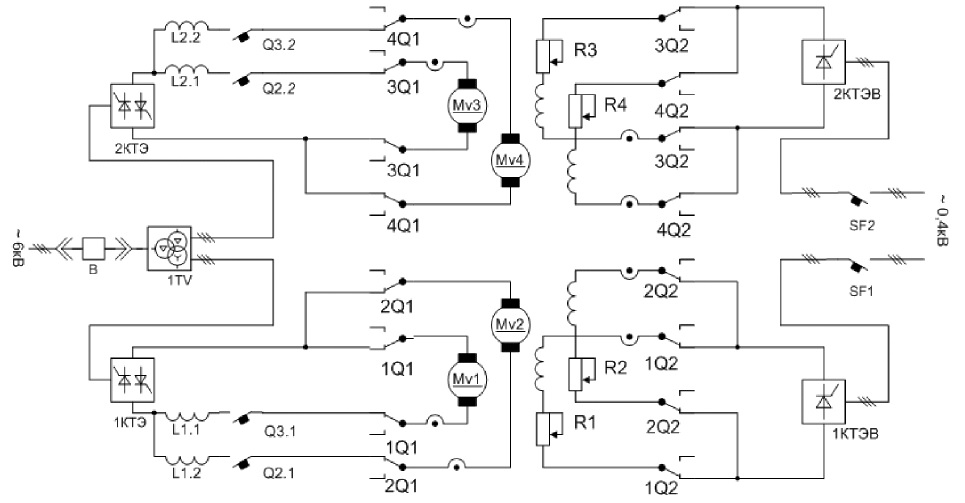
Рисунок 1 – Силовая схема электропривода вертикальной клети прокатного стана 1150
Якорные цепи каждой пары соединены параллельно и питаются от реверсивных тиристорных преобразователей. Обмотки возбуждения также соединены параллельно, а подстройка рабочей точки характеристики осуществляется введением добавочных резисторов. Ввиду неидентичности параметров электрических машин и их изменения в процессе эксплуатации, такая схема не обеспечивает равномерного распределения моментов нагрузки между электродвигателями. На (рис.2) представлена диаграмма токов якорей электродвигателей, приводящих в движение валок вертикальной клети для двух проходов при двухслитковой прокатке. Наряду с неравномерным распределением токов (моментов) между электродвигателями на диаграмме имеются интервалы, на которых 1 электродвигатель работает в двигательном режиме, а 2 в генераторном. Каждый вход в такой режим и выход из него сопровождаются изменением направления передачи вращающего момента в редукторе с соответствующим размыканием/замыканием зазоров в шестеренных передачах, что приводит к ускоренному износу зубьев.
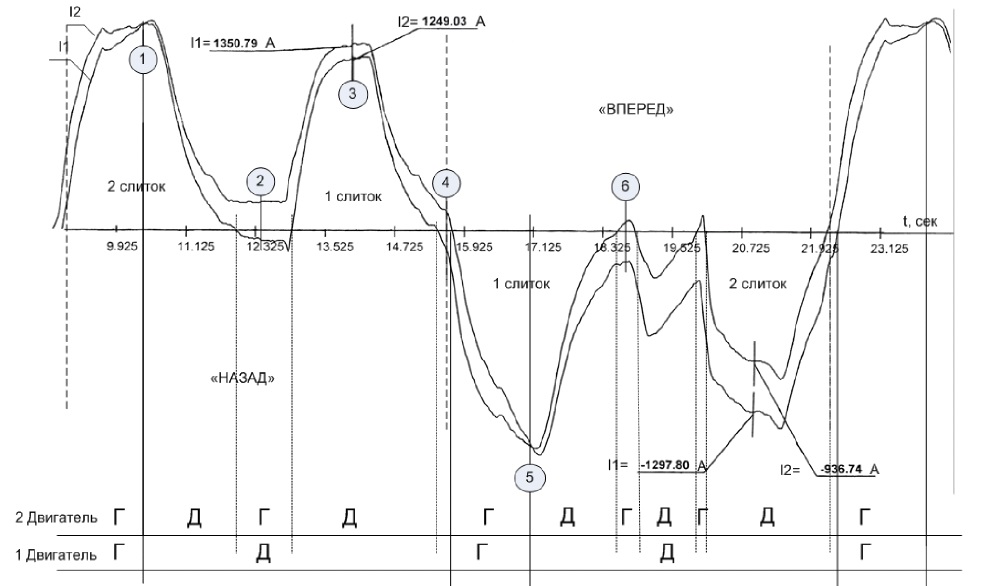
Рисунок 2 – Диаграмма токов электродвигателей привода вертикального валка прокатного стана 1150 для двух проходов при двухслитковой прокатке
Рассмотрим соответствие между отдельными точками токовой диаграммы и скоростными характеристиками электропривода вертикальной клети (Рис.З). Точка 1 соответствует моменту, когда в процессе торможения привода после предыдущего прохода, напряжение преобразователя равно нулю и тормозной ток обеих электродвигателей имеет одинаковое значение. Математические выкладки, подтверждающие это, приведены в [2]. Затем включается в работу выпрямительная секция, обеспечивающая положительную полярность напряжения в якорных цепях и двигатели переходят в точку холостого хода 2, в которой из-за неидентичности скоростных характеристик 1 двигатель работает в двигательном, а 2 в генераторном режимах. После захвата валками следующего слитка оба двигателя работают в двигательном режиме с разностью якорных токов в точке 3, равной 100 ампер. Затем оператор дает команду на торможение и напряжение на якорях электродвигателей снижается, что обеспечивает последовательный переход в генераторный режим точка 4. Завершается процесс торможения, в точке 5, когда включается в работу выпрямительная группа, обеспечивающая отрицательное напряжение на якорях. Процесс повторяется при вращении валков в обратную сторону с переходом в точку холостого хода отрицательного направления вращения 6 и т.д.
Для выравнивания моментов (токов) электродвигателей эффективным методом является воздействие на скоростные характеристики путем изменения значений токов возбуждения электродвигателей в функции разности токов якорей. Рассмотрим реализацию такого воздействия в двигательном и генераторном режимах. В двигательном режиме большую нагрузку берет электродвигатель с более высокой жесткостью характеристики при равенстве скоростей холостого хода или с большей скоростью холостого хода, как показано на рисунке 4. В генераторном режиме больший ток имеет электродвигатель с менее жесткой характеристикой или меньшей скоростью холостого хода. Интересной особенностью является то, что и в двигательном и в генераторном режимах для выравнивания значений токов якорей, ток возбуждения двигателя с более высокой скоростью холостого хода нужно увеличивать, а с меньшей - уменьшать. Это положение верно и для противоположного направления вращения привода. Скорректированные таким образом скоростные характеристики электродвигателей для двух режимов работы, обозначены (на рис.4), как 1К и 2К.
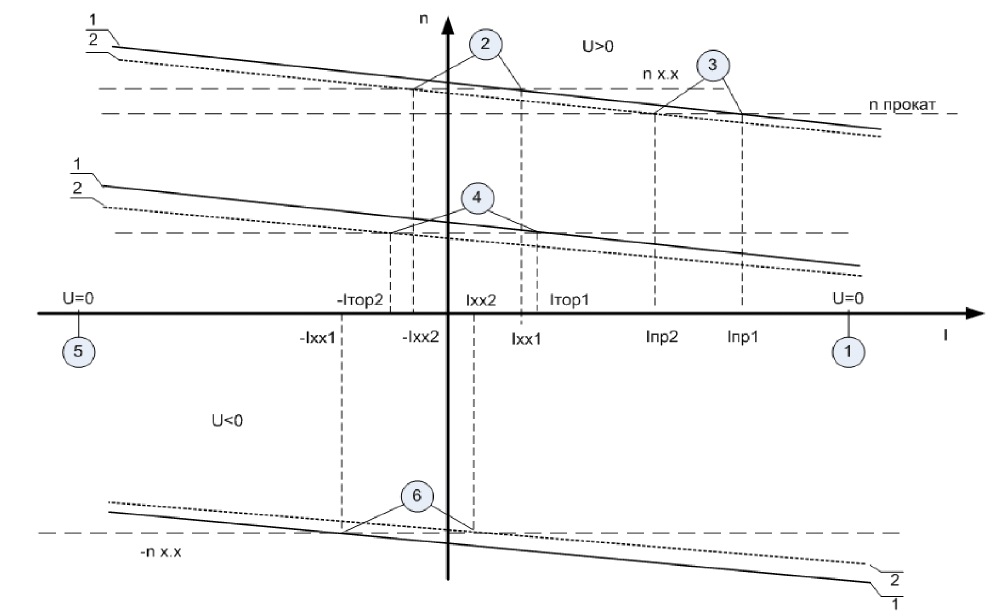
Рисунок 3 – Скоростные характеристики электродвигателей привода вертикального валка прокатного стана 1150
Из проведенного анализа вытекает следующий вывод: для выравнивания загрузки электродвигателей постоянного тока в реверсивном двухдвигательном электроприводе, необходимо повышать ток возбуждения электродвигателя, имеющего большее значение скорости холостого хода или меньшую жесткость характеристики и снижать ток возбуждения другого электродвигателя в функции модуля разности их якорных токов.
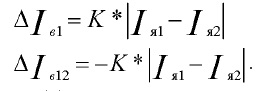 |
где К- коэффициент передачи по корректирующему воздействию.
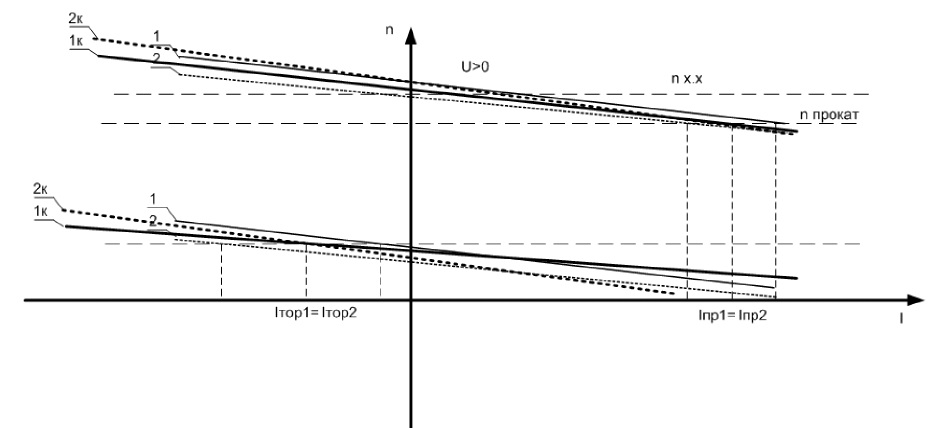
Рисунок 4 – Коррекция скоростных характеристик электродвигателей привода вертикального валка
Вторым вариантом формирования корректирующего воздействия являются уравнения:
 |
где signU - знак полярности напряжения на якорях электродвигателей.
Список использованной литературы
1. Иванченко Ф.К. Динамика металлургических машин / Ф.К. Иванченко, В.А. Красношапка. - М.: Металлургия, 1983. - 296 с.
2. Коцегуб П.Х. Режимы работы двухдвигательного привода постоянного тока с питанием якорей и обмоток возбуждения от общих источников / П.Х. Коцегуб, О.И. Толочко, А.В. Кузьмин // Вестник Национального технического университета «Харьковский политехнический институт». Серия «Электротехника, электроника и электропривод». - 2001. -Вып. 10. - С. 52-54.