Источник: Журнал «Вестник Самарского государственного аэрокосмического университета им. академика С.П. Королёва (национального исследовательского университета)».– 2013. – №1(39). – с. 107-114. // URL: http://cyberleninka.ru/...
УДК 62-503.57+ 004.312
СИСТЕМА АКТИВНОГО СНИЖЕНИЯ ШУМА НА БАЗЕ ИЗМЕРЕНИЯ КОЛЕБАТЕЛЬНОЙ СКОРОСТИ ЧАСТИЦ
© 2013 М. С. Гаспаров1, М. Ю. Харитонов2
1 Самарский государственный аэрокосмический университет имени академика С.П. Королёва ( национальный исследовательский университет)
2ООО «УРАРТУ», Самара
В статье рассматривается система активного гашения шума на базе отрезка вентиляционного канала длиной один метр с сечением 10х10 см со встроенными динамиками, имитирующими источники шума и антишума. Система автоматического шумоподавления формирует антишум в соответствии с сигналами двух акустических датчиков. Исследуется эффективность подавления акустической обратной связи. Реализована схема активного гашения шума с нейтрализацией обратной связи на базе контроллера с программируемой логической интегральной схемой (ПЛИС), позволяющей на аппаратном уровне реализовать систему автоматического управления. В качестве датчика опорного сигнала был применён микроэлектромеханический чувствительный элемент Microflown, непосредственно измеряющий колебательную скорость частиц.
Снижение шума, акустическая обратная связь, колебательная скорость частиц, ПЛИС.
Введение
Традиционно системы активного снижения шума минимизируют среднее во времени или мгновенное значение квадрата давления. Так как квадрат давления напрямую связан с плотностью потенциальной акустической энергии, то такие системы минимизируют значение плотности потенциальной энергии в определенном месте акустического поля. Хотя такой подход приводит к значительному снижению уровня звукового давления в этой области, уменьшение уровня шума может быть едва заметно даже в ближнем поле. Известно, что минимизация плотности акустической энергии должна приводить к уменьшению уровня звукового давления и его пространственного градиента, тем самым увеличивая зону низкого уровня шума. Плотность энергии может быть оценена на основе оценки плотностей акустической кинетической и потенциальной энергий. Известно, что плотность кинетической акустической энергии прямо связана с квадратом скорости акустических частиц. В свою очередь, скорость акустических частиц в одном направлении может быть оценена с помощью датчика Microflown Technologies.
На практике чаще всего применяют модификации алгоритмов LMS (LeastMeanSquare, метод наименьших квадратов , в отечественных источниках иногда используется аббревиатура МНК) , в частности алгоритм наименьших средних квадратов с формированием опорного сигнала (FX-LMS алгоритм), использующий включенную в параллель к объекту управления модель его передаточной функции (модель вторичного канала) [1].
Важным требованием в адаптивных алгоритмах является наличие опорного сигнала, наиболее коррелированного с источником шума. В случае если это акустический датчик, то остро стоит проблема акустической обратной связи.
На рис. 1 показана схема активного снижения шума. Знание вторичного пути S(z) имеет большое значение в алгоритме FX-LMS. Обычно оценка вторичного пути определяется в режиме офлайн и затем передаётся в контроллер и оценивается в приложениях реального времени. Для идентификации используется дополнительный LMS фильтр. В некоторых системах, где условия вторичного канала не стационарны, требуется одновременное проведение онлайн идентификации и снижения шума.
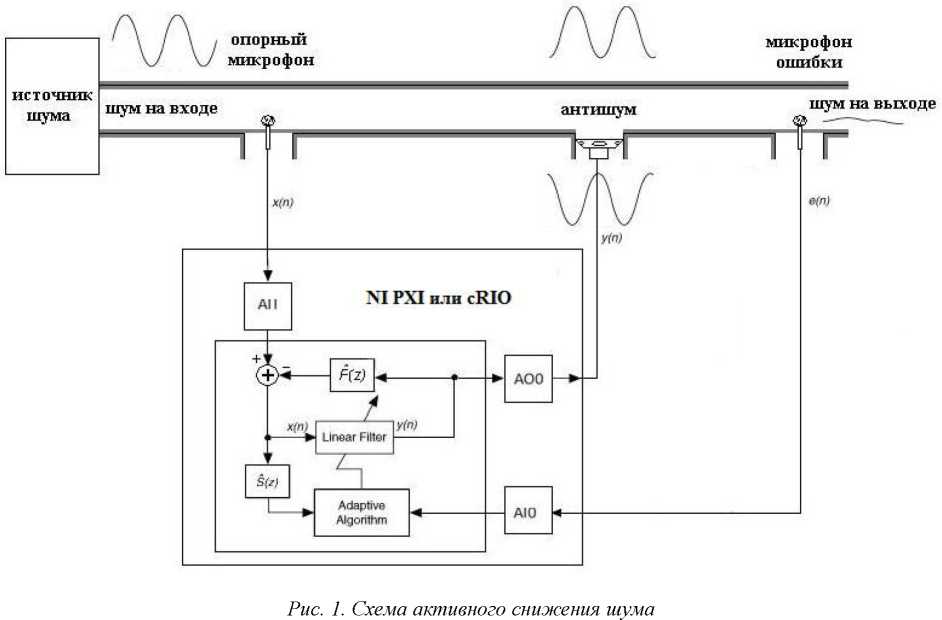
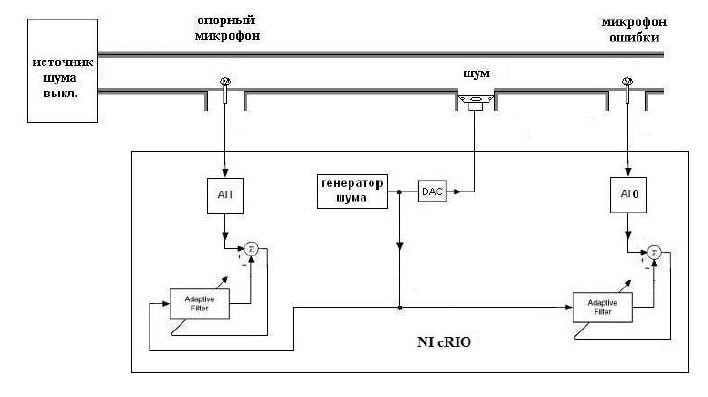
Рис. 2. Схема идентификации передаточной фукции объекта управления
Рассмотрим практическое применение различных аппаратных платформ для идентификации модели передаточной функции объекта управления (модель вторичного канала S(z) ) и учёта передаточной функции обратной связи F(z) (рис.2). Оба блока реализованы в виде цифровых фильтров.
При изучении различных шумовых полей измерения звукового давления далеко не всегда дают исчерпывающую информацию об особенностях поля, если оно имеет сложную пространственную структуру. Гораздо более полная информация может быть получена из анализа энергетических характеристик звукового поля: плотности потенциальной и кинетической энергии, вектора акустической интенсивности. В ближнем акустическом поле скорость движения акустических частиц является важнейшей характеристикой.
Интенсивность звука является произведением звукового давления на колебательную скорость частиц [2].
Традиционные средства определяют интенсивность звука методом двух микрофонов. Данный способ вносит значительные ошибки, связанные с расстоянием между микрофонами и фазой. Более точные измерения можно провести, непосредственно измеряя интенсивность звука: звуковое давление и колебательную скорость. Соответствующие датчики разработаны в университете Твенте (Нидерланды) и изготавливаются компанией Mi-croflown Technologies.
Данные датчики непосредственно измеряют колебательную скорость в широком частотном диапазоне (20 Гц-20 кГц). При этом измерения возможны при высоком показателе интенсивности давления [3].
Чувствительный элемент (ЧЭ)
Microflown работает , используя две экс-трачувствительные нагретые платиновые нити с очень низкой термостойкостью (рис. 3). При протекании воздуха нить, находящаяся выше по потоку, охлаждается, нагревая воздух. Как следствие, вторая нить охлаждается меньше. Разность температур является прямым измерением скорости акустических частиц. Выходное напряжение ЧЭ остаётся постоянным.
Датчик PU - это акустический зонд, состоящий из двух чувствительных элементов: обычный микрофон и ЧЭ Microflown, с помощью которого можно одновременно в одной точке измерять скорость акустических частиц и акустическое давление.
Microflown является единственным ЧЭ, который физически может непосредственно измерять скорость акустических частиц [4].
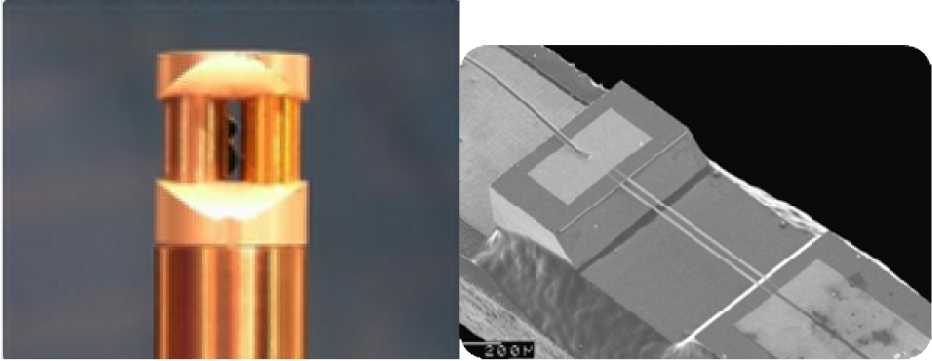
Рис. 3. Датчик измерения колебательной скорости частиц Microflown; чувствительный элемент Microflown
Экспериментальные исследования
В результате реализована система активного снижения шума с подавлением обратной связи и проведены исследования на двух аппаратных платформах. Первая − на базе ПЛИС и контроллера National Instruments CompactRIO (NI cRIO) с операционной системой реального времени VxWorks, вторая − на базе платформы NI PXI с операционной системой реального времени NI LabVIEW. Система на базе NI PXI более удобна для отладки, так как в данном случае имеется возможность быстро вносить изменения в систему без длительного процесса компиляции программы для ПЛИС.
Исследуемая адаптивная система понижения шума состоит из следующих элементов:
1) акустическая система на базе канала;
2) динамик − источник антишума;
3) динамик − источник тестового шумового сигнала;
4) микрофон ошибки с интерфейсом ІСР;
5) опорный датчик Ри Microflown;
6) управляющий контроллер NI cRIO;
7) ПК с NI LabVIEW.
На рис. 4 представлен внешний вид экспериментальной установки. Расположение датчика Microflown подобрано таким образом, что влияние источника антишума на него минимально.
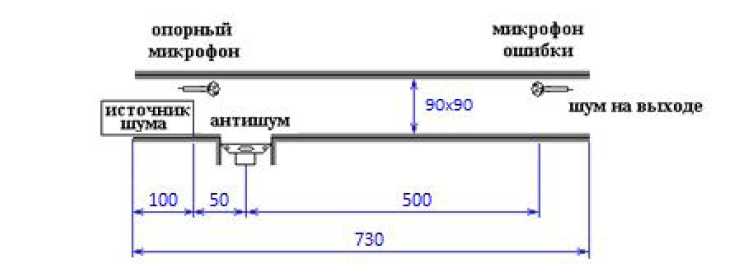
На источник шума подается звук частотой 300 Гц, а на источник антишума
− 360 Гц. Оба микрофона находятся в одной точке (рис. 5).
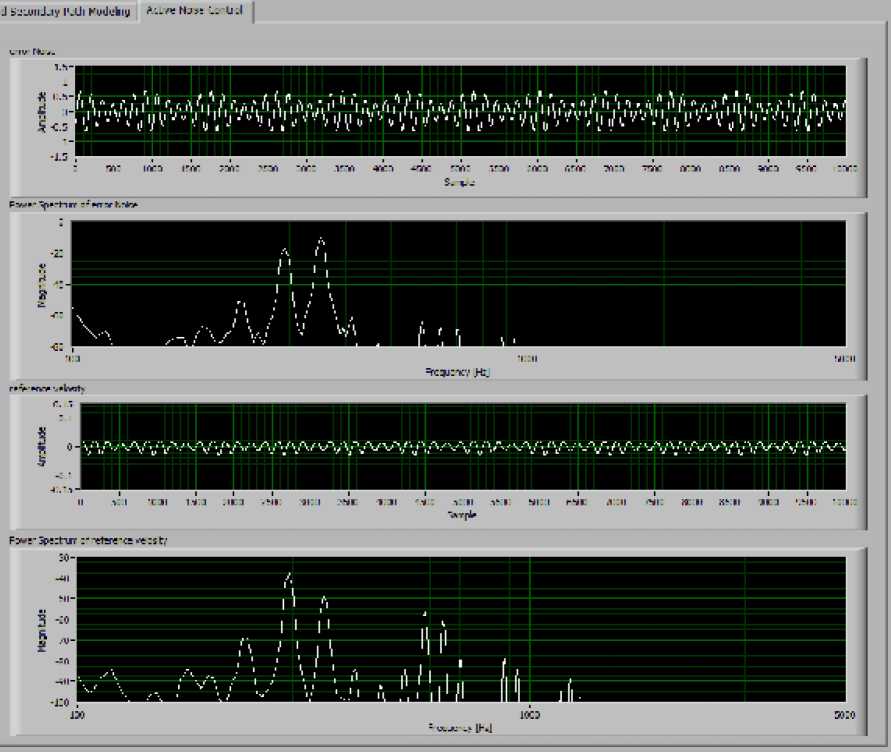
Из графиков на рис. 6 видно, что правильно подобрав положение
ЧЭ Microflown, можно достичь уменьшения влияния источника антишума
на опорный микрофон до 25 дБ по сравнению с обычным микрофоном.
Рис. 4. Акустическая система шумоподавления на базе модельного канала Рис. 5. Схема экспериментальной установки Рис. 6. Сравнение амплитуд источника шума и антишума (спектр сверху - звуковое давление, спектр снизу - колебательная скорость) Как
видно из графиков на рис. 6, удалось достичь подавления сигнала источника
шума на 20 дБ.
В процессе работы системы наблюдалось
самовозбуждение на низких частотах, связанное с собственной
частотой экспериментального канала и жёсткостью всей конструкции.
От самовозбуждения удалось избавиться, применив ФНЧ на выходе
аналогового модуля сигнала антишума. При этом изменилась импульсная
характеристика системы.
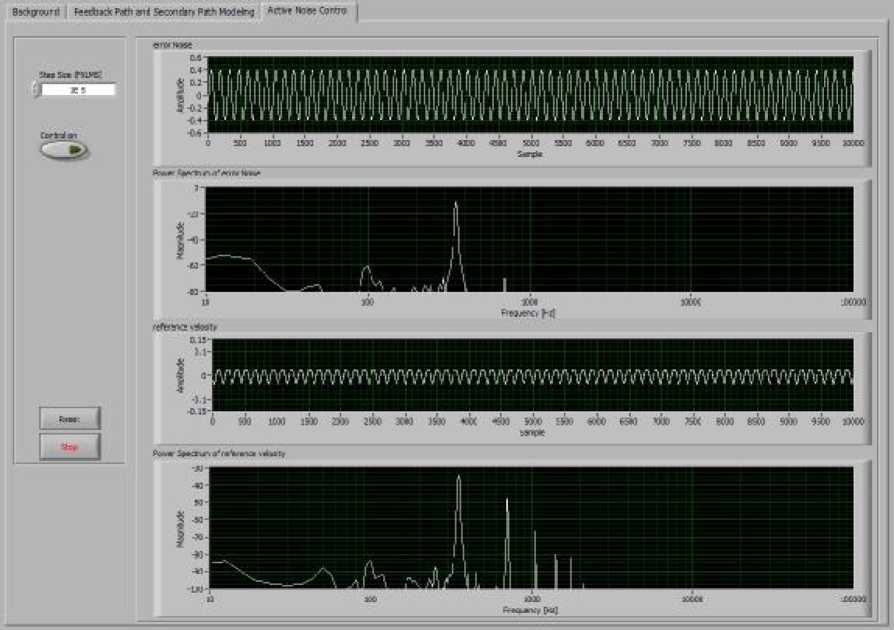
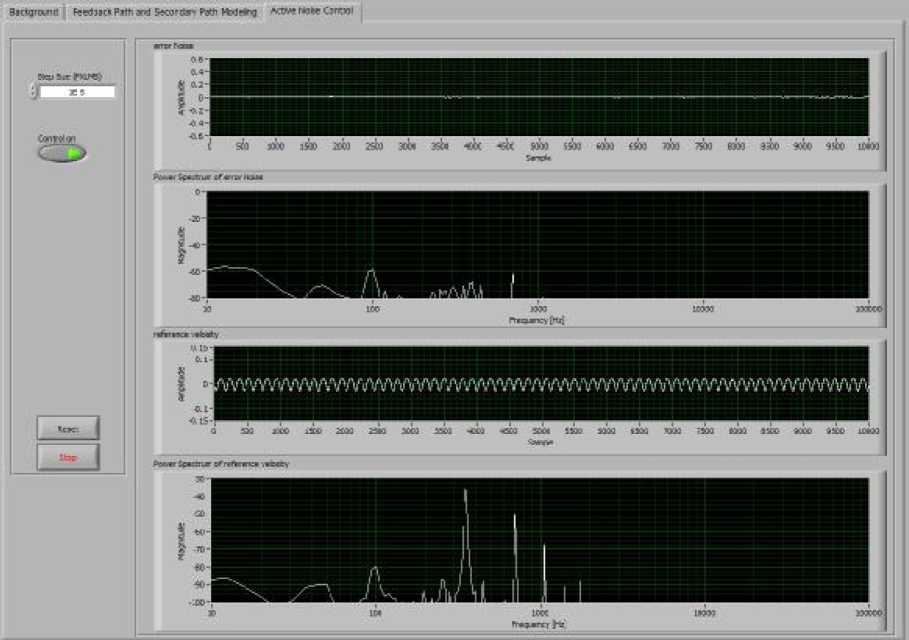
Как видно из графиков (рис. 7, 8), применение ФНЧ
позволило повысить устойчивость системы и полностью (на 50 дБ)
нейтрализовать источник шума. Рис. 7. Результаты работы системы активного гашения шума, ФНЧ выключен Рис. 8. Результаты работы системы активного гашения шума, ФНЧ включен
Рассмотрена схема активного гашения шума в канале
воздуховода с нейтрализацией обратной связи. Применение
микроэлектромеханического чувствительного элемента Microflown
позволило значительно снизить влияние источника антишума на
опорный канал. Было
обнаружено периодическое низкочастотное самовозбуждение в районе 90 −
100 Гц. Проблема решалась двумя способами. Первый вариант −
введение в программу FPGA управляющего контроллера алгоритма ФНЧ.
Второй вариант − применение на выходе
аналогового модуля контроллера сигнала антишума фильтра
нижних частот на дискретных элементах. Использование первого
варианта повысило устойчивость системы к самовозбуждению, но
эффективность подавления шума снизилась, что связано с повышением
времени обработки сигнала. Второй вариант полностью
предотвратил самовозбуждение и повысил как эффективность
шумоподавления, так и эффективность работы системы с применением
микроэлектромеханического чувствительного элемента Microflown,
что в большой степени зависит от его правильного расположения.
Выбор положения осуществляется экспериментально и зависит только
от направления распространения колебаний от источника шума и антишума.
Необходимо найти место, где принимаемый сигнал от источника
шума максимален, а от источника антишума минимален.
В итоге получена устойчивая система шумоглушения, позволяющая в диапазоне
частот от 120 до 480 Гц получить подавление шума от 20 до 60 дБ.
Работа выполнена при поддержке Федеральной целевой
программы "Научные и научно-педагогические кадры инновационной
России" (2009-2013 гг.), выполняемой в рамках мероприятия 1.2.2.
Проведение научных исследований под руководством кандидатов наук". 1. Кравчун, П.Н. Генерация и методы снижения шума и звуковой вибрации [Текст] / П.Н. Кравчун. - М.: Изд-во МГУ, 1991. - 184 с. 2. ГОСТ 30457-97 (ИСО 9614-1-93). Акустика. Определение уровней звуковой мощности источников шума на основе ин-тенсивости звука. Интесивность звука. [Текст] / - М.: Изд-во стандартов, 1997. 3. Zeng, J. Recursive filter estimation for feedforward noise cancellation with acoustic coupling [Text] / J.Zeng, R.A. de Callafon // Journal of Sound and Vibration, vol. 291, pp. 1061-1079, 2006. 4. Microflown Technologies Inc.:
www.microflown.com. 2013 M. S. Gasparov1, M. Yu. Kharitonov2 1Samara State Aerospace University named after academician S. P. Korolyov (National Research University) 2URARTU Systems plc, Samara The paper describes a system of active noise suppression based on a one-meter long air duct with the section of 10x10 cm with built-in speakers imitating noise and anti-noise. The system of automatic noise suppression generates anti-noise in accordance with the signals from two acoustic sensors. The efficiency of suppressing acoustic feedback is analyzed. An active noise suppression system based on FPGA (field programmable gate array) was built. A microelectromechanical Microflown sensor directly measuring particle velocity is used as the reference signal sensor. Active noise suppression, feedback neutralization, particle velocity, FPGA. Информация об авторах Гаспаров Маркар Сергеевич, кандидат технических наук, доцент кафедры автоматических систем энергетических установок, Самарский государственный аэрокосмический университет имени академика С. П. Королёва (национальный исследовательский университет). E-mail: markar.gasparov@gmail.com. Область научных интересов: системы активного шумоподавления. Харитонов Михаил Юрьевич, инженер по автоматизации, ООО «УРАРТУ». Email: mx@urartusystems.ru. Область научных интересов: системы активного шумоподавления. Gasparov Markar Sergeevich, candidate of technical science, associate professor, Samara State Aerospace University named after academician S. P. Korolyov (National Research University). E-mail: markar.gasparov@gmail.com. Area of research: active noise suppression. Kharitonov Mikhail Yuryevich, automation engineer, URARTU Systems plc. E-mail:
mx@urartusystems.ru. Area of research: active noise suppression.
Заключение
Библиографический список
ACTIVE NOISE CONTROL SYSTEMS BASED ON ACOUSTIC PARTICLE VELOCITY MEASUREMENTS