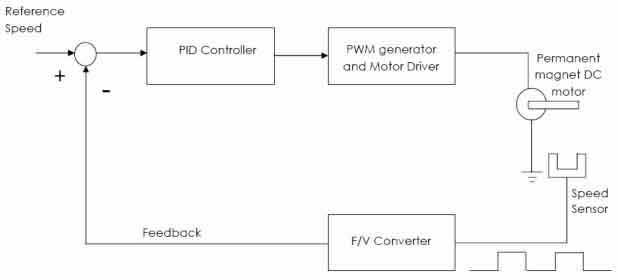
Рисунок 1 – Система управления скоростью двигателя постоянного тока
Авторы: Nikunj A. Bhagat, Mahesh Bhaganagare
Автор перевода: А.С. Болотов
Источник: DC Motor Speed Control using PID Controllers
В этой статье рассматривается реализация ПИД-регулятора для управления скоростью двигателя постоянного тока. Двигатель моделируется как система первого порядка и исследуется его реакция. Объясняется управление скоростью с использованием ПИ и ПИД регуляторов и приводится реализация контроллера с использованием операционных усилителей. Рассматривается реакция системы на изменение нагрузки.
Рисунок 1 – Система управления скоростью двигателя постоянного тока
Скорость двигателя необходимо регулировать чаще всего в таких сферах как промышленность, робототехника, бытовая техника. В этой работе мы реализовали систему регулирования скорости двигателя постоянного тока. Идея системы регулирования скорости состоит в том, чтобы поддерживать скорость двигателя на желаемом значении при различных нагрузках и возмущениях. На практике двигатель постоянного тока является нелинейным устройством и его скорость изменяется при изменении нагрузки, а также из-за помех. В промышленности часто используется алгоритм ПИД регулирования, которой был реализован в данной работе.
На рисунке (1) представлена блок-схема системы управления скоростью двигателя постоянного тока. Скорость двигателя определяется оптическим датчиком и преобразуется в напряжение обратной связи. Далее сигнал скорости сравнивается с опорным сигналом (т.е. желаемой скоростью) при помощи сумматора, на выходе которого формируется сигнал ошибки. ПИД-регулятор воздействует на сигнал ошибки и генерирует соответствующее управляющее напряжение. Блок генератора ШИМ изменяет величину напряжения, подаваемого на двигатель, для управления его скоростью.
В разделе 1 работы описывается реакция разомкнутого контура двигателя постоянного тока и расчет его передаточной функции первого порядка. В разделе 2 приведены особенности измерения скорости с помощью оптического датчика. Преобразование частоты в напряжение описывается в разделе 3. Раздел 4 описывает теорию ПИД регулятора и его структуру. В разделе 5 приведены особенности генератора ШИМ и двигателя, а так же полная схема системы управления в разделе 6. В разделах 7 и 8 показаны результаты экспериментов. Выводы представлены в разделе 9.
Для двигателя постоянного тока с постоянными магнитами (ДПТ ПМ) была реализована система регулирования скорости. ДПТ ПМ состоит из ротора или якоря и статора, в котором вместо обмотки возбуждения применяются постоянные магниты. Существует два способа управления скоростью двигателя постоянного тока:
В ДПТ ПМ магнитное поле генерируется постоянными магнитами и не поддается изменению, поэтому мы решили реализовать управление по якорной цепи. Для управления напряжением якоря применяется широтно-импульсная модуляция (ШИМ), с помощью которой регулируется среднее напряжение, подаваемое на двигатель. Подробности реализации ШИМ приведены в разделе (5).
Технические характеристики двигателя постоянного тока:
Для реализации проекта была использована установка двигателя постоянного тока, находящаяся в лаборатории контроля и вычислений (Бомбей). Эта установка производится TECHNO INSTRU-MENTS и в настоящее время используется для лабораторных экспериментов. Установка включает в себя ДПТ ПМ, снабженный щелевым алюминиевым диском и шлицевым оптическим датчиком H21A1 для измерения скорости. В этой установке предусмотрена возможность нагружения двигателя с помощью устройства магнитного торможения. Изучен эффект загрузки двигателя и характеристики контроллера.
Для изучения реакции разомкнутого контура двигателя постоянного тока, он был смоделирован как система первого порядка. Передаточная функция двигателя постоянного тока с управлением по якорю приведена в [1],
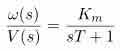
где:
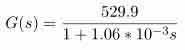
Для оценки передаточной функции электродвигателя постоянного тока были проведены эксперименты по изучению его характеристик с разомкнутым контуром. Значения Km и T рассчитываются, как описано ниже

Рассчитанная передаточная функция двигателя постоянного тока,
Для измерения скорости двигателя используется оптический датчик. Это пара светодиодов и фототранзисторов, которая генерирует импульсы, соответствующие скорости двигателя. Диск с прорезью, имеющий 12 пазов, фиксируется на валу двигателя, и он преграждает путь между светодиодом и фототранзистором, когда двигатель вращается. На один оборот вала двигателя оптический датчик генерирует 12 импульсов. Максимальная скорость двигателя составляет 2500 об / мин. Поэтому количество импульсов, генерируемых в секунду на выходе оптического датчика, при максимальной скорости двигателя 2500/60 * 12 = 500 импульсов в секунду. Эти импульсы изменяются в диапазоне от 0 до 5 В, а затем преобразуются в ± 5 В с помощью OPAMP 741. На рисунке (4) показана схема оптического датчика вместе с генератором ШИМ и двигателем. Мы используем оптический датчик H21A1 фирмы Fairchild semiconductors.
Рисунок 2 – Характеристики двигателя
H21A1 Технические характеристики:
Импульсы от оптического датчика передаются на преобразователь F/V. Преобразователь F/V создает напряжение постоянного тока (0-5 В), пропорциональное частоте вращения ротора двигателя. Мы используем преобразователь F/V LM2907N производства National Semiconductor. Принципиальная схема преобразователя F/V показана на рисунке (5).
Внутренняя схема LM2907N показана на рисунке (6) [3]. Входной каскад LM2907N представляет собой накопитель заряда, в котором входная частота преобразуется в постоянное напряжение, для этого используется конденсатор C1, один выходной резистор R1, а для фильтрации используется конденсатор C2. Когда входной каскад изменяет состояние (из-за подходящего пересечения нуля или дифференциального напряжения на входе), конденсатор синхронизации либо заряжается, либо разряжается линейно между двумя напряжениями, разница составляет Vcc/2. Затем в половине цикла входной частоты или времени, равного Fin/2, изменение заряда на временном конденсаторе равно Vcc/2 * C1. Затем среднее значение тока накапливается в конденсаторе,

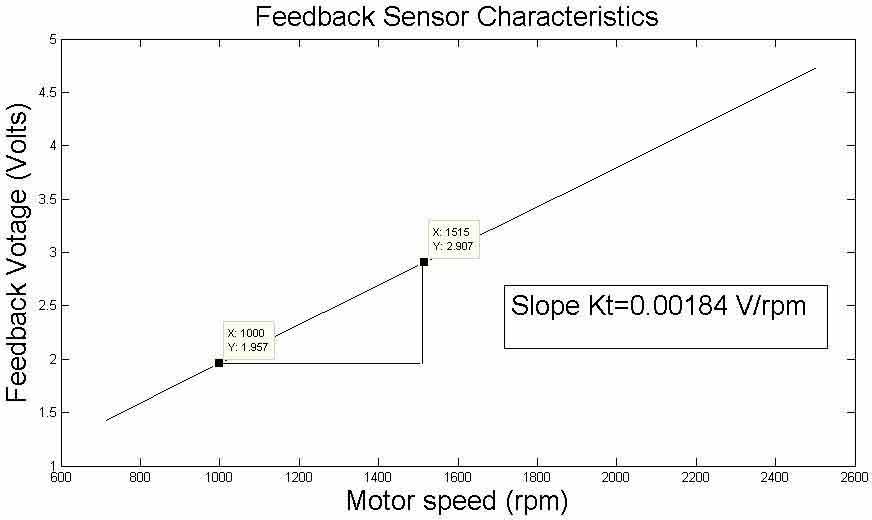
Рисунок 3 – Характеристики датчика обратной связи
Выходная схема очень точно отражает этот ток в нагрузочном резисторе R1, соединенном с землей, так что если импульсы тока интегрируются с фильтрующим конденсатором, то Vo=Ic*R1 и полное уравнение преобразования становится,
где K – постоянная усиления, обычно K = 1. Емкость C2 зависит только от допустимого количества пульсаций и требуемого времени отклика.
Существуют некоторые ограничения по выбору R1 и C1, которые следует учитывать для оптимальной производительности. Конденсатор времени также обеспечивает внутреннюю компенсацию зарядного накопителя и должен поддерживаться более 500 пФ для очень точной работы. Меньшие значения могут вызывать ток ошибки на R1, особенно при низких температурах. Выходной ток на выводе 3 фиксируется, а затем Vo/R1 должно быть меньше или равно этому значению. Если R1 слишком большой, он может стать значительной долей выходного импеданса на выводе 3, который ухудшает линейность. Также необходимо учитывать пульсации выходного напряжения при выборе C2, на который влияет R1. Выражение, описывающее содержимое пульсации на выводе 3 для одной комбинации R1C2,
Похоже, что R1 может быть выбран независимо от пульсации, однако время реакции или время, которое требуется для стабилизации Vo при новом напряжении, возрастают по мере увеличения величины C2, поэтому следует тщательно выбирать компромисс между пульсациями, временем отклика и линейностью.
Наконец, максимальная достижимая входная частота определяется Vcc, C1 и I2,
Шумы в F / V-преобразователе больше на более низкой частоте, поэтому мы использовали F / V-преобразователь с 2-полюсным фильтром Баттерворта, чтобы уменьшить пульсацию выходного напряжения. Решено выбрать нижнюю частоту полюсов
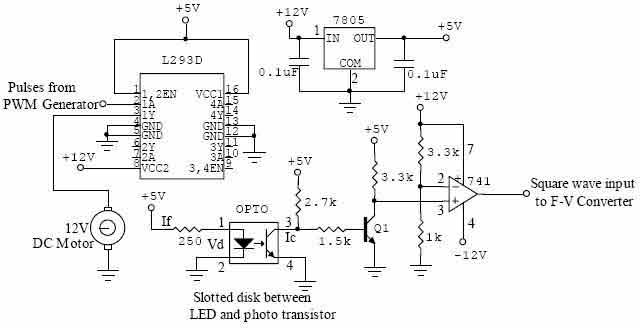
Рисунок 4 – Схема датчика скорости
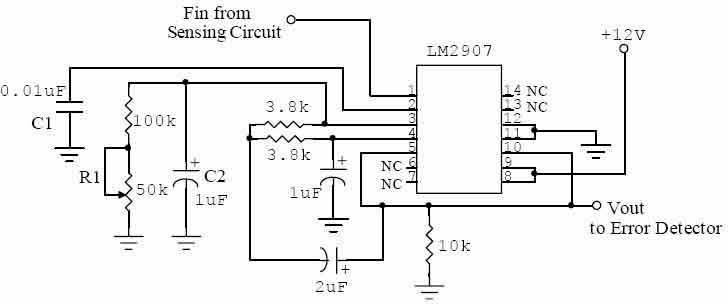
Рисунок 5 – Схема F/V-преобразователя
30 Гц для получения линейности и уменьшения шумов в выходном напряжении. Расчетные значения показаны на рисунке (5).
Алгоритм ПИД-регулирования наиболее широко используется в промышленности. Мы использовали ПИД-регулятор для управления скоростью двигателя. Реализация ПИД-регулятора показана на рис. (7).
Ошибка между заданной скоростью и фактической скоростью задаётся в качестве входной величины для ПИД-регулятора. Регулятор, в зависимости от ошибки, изменяет свой выход таким образом, чтобы ошибка была минимизирована. Подробная информация о теории и настройке ПИД-регуляторов приведена в [2]. Передаточная функция ПИД-регулятора указана как,
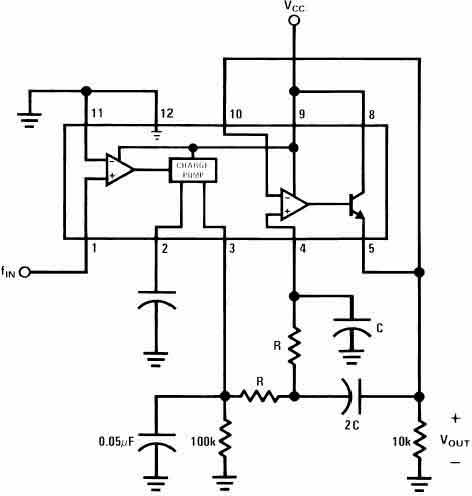
Рисунок 6 – Внутренняя схема LM2907N
где:
Пропорциональная составляющая (Kp) настраивается так, что управляющий сигнал u(t) немедленно реагирует на ошибку. Но ошибка никогда не сводится к нулю, и, по умолчанию, присутствует ошибка смещения. Чтобы убрать ошибку смещения, используется интегральное управляющее воздействие (TI). Дифференциальное звено (TD) используется для ослабления колебаний в реакции системы. Кроме того, наличие управления по производной уменьшает требования к настройке Kp [2]. В этом проекте были реализованы ПИ и ПИД-регуляторы, и была оценена эффективность системы. Алгоритмы управления были реализованы с использованием операционных усилителей. Подробности реализации приведены в следующих разделах.
Настройка ПИД-регулятора включает в себя расчет коэффициентов регулятора, Kp, TI и TD в зависимости от требований к производительности. В литературе существуют различные методы для расчета этих значений. Мы использовали методику Циглера-Никольса для определения коэффициентов регулятора [2]. Эти правила были разработаны из экспериментов и анализа различных промышленных процессов. Мы используем метод максимального цикла, заданный правилами Циглера-Никольса, который использует данные, полученные в результате проведенных экспериментов.
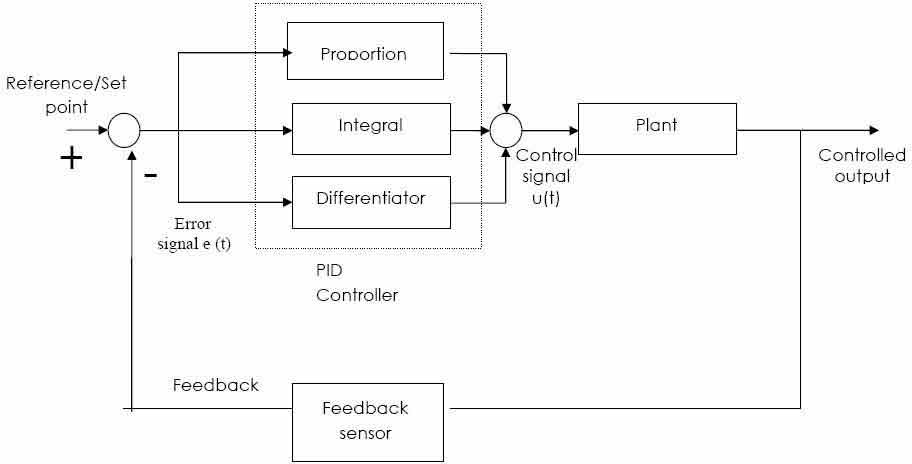
Рисунок 7 – Реализация ПИД
| Метод управления | Метод максимального цикла управления |
|---|---|
| П-регулятор | KP = 0,5Kpu |
| ПИ-регулятор | KP = 0.45KpuTI = 0,83Pu |
| ПИД-регулятор | KP = 0.6KpuTI = 0,5 KpuTD = 0,125Pu |
Описанного выше метод использовался для определения значений контроллера, KP = 5,1, TI = 13,28 мкс, TD = 0,025 с.
Блоки П, И и Д были реализованы с использованием операционного усилителя TLO84. Схема показана на рисунке (8).
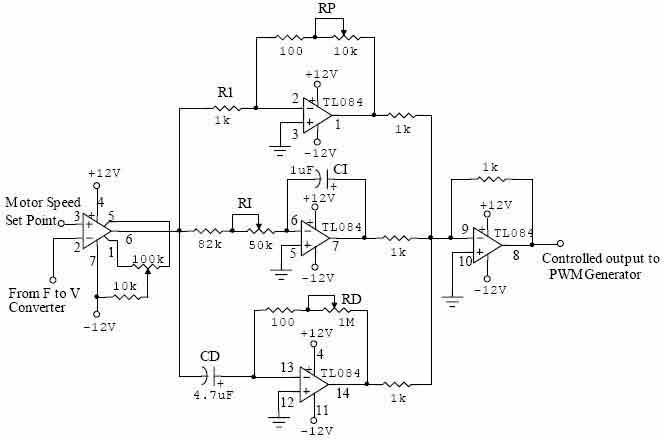
Рисунок 8 – Схема реализации ПИД
Для пропорционального управления,
Для интегрального управления,
Для дифференциального управления,
Как показано на принципиальной схеме (8), путем изменения RF, RI и RD можно скорректировать значения регулятора. ПИД-цепь была протестирована путем ввода квадратной волны VPP в качестве входного сигнала. Значения RF, RI и RD корректировались до получения желаемого результата.
Модулятор ширины импульса представляет собой схему, которая генерирует квадратную форму волны для входного напряжения постоянного тока. Длительность импульса регулируется путем изменения величины входного напряжения. Генератор ШИМ может использоваться для управления средним напряжением, подаваемым на двигатель постоянного тока, путем изменения скважности импульсов для управления скоростью двигателя. Этот метод используется в нашем проекте, в котором ПИД-регулятор изменяет управляющее напряжение в зависимости от ошибки. Сигнал управления подается на генератор ШИМ, что соответственно изменяет скважность ШИМ. Преимущество ШИМ заключается в том, что импульсы достигают полного напряжения питания и приводят к большему крутящему моменту в двигателе, позволяя легче преодолевать внутренние сопротивления двигателя.
Были протестированы две схемы генератора ШИМ. Первая схема (рис.9) представляет собой генератор ШИМ, реализованный с использованием генератора треугольной волны и компаратора. В ходе реализации были поставлены следующие проблемы.
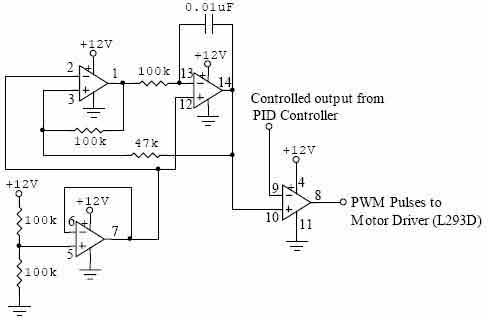
Рисунок 9 – Генератор ШИМ
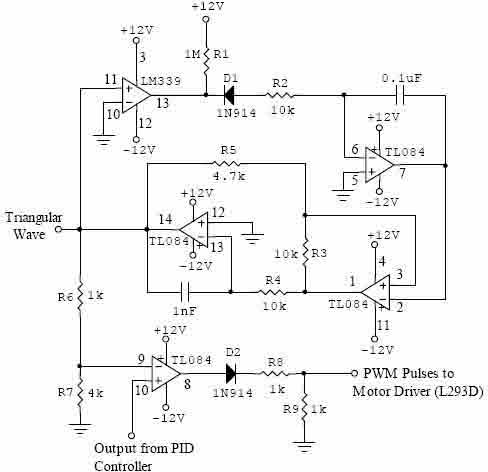
Рисунок 10 – Модифицированный генератор ШИМ
Схема, представленная на рисунке (9), дает значительную ошибку постоянного тока выше опорного напряжения на выходе треугольной волны равную 1.5В (из-за схемы интегратора), который вызывает смещение постоянного тока 1,5 В на выходе ШИМ. Из-за ошибки смещения, напряжение на двигателе повышается на 1.5В.
Чтобы уменьшить это смещение, мы изменили схему, чтобы вернуть выход треугольной волны на нулевой опорный уровень. Модифицированная схема представлена на рисунке (10). Схема использует механизм обратной связи с компаратором (LM 339) и схемой интегратора для исправления ошибки смещения постоянного тока и приводит выход треугольной волны к нулевому опорному уровню. Благодаря этой коррекции мы можем генерировать импульсы ШИМ от 0% до 100% рабочего диапазона после сравнения этой треугольной волны с управляемым выходом ПИД-регулятора.
В качестве драйвера двигателя используется L293D. L293D – это четырехтактный драйвер фирмы ST Microelectronics.
Спецификации L293D:
Система управления двигателем постоянного тока была протестирована с помощью ПИ и ПИД-регуляторов. В этом разделе показаны выходные сигналы генератора ШИМ для двух разных опорных напряжений (соответствующих заданной скорости), а так же при номинальной нагрузке и при её отсутствии. Для изучения характеристик контроллера в условиях нагрузки, электродвигатель постоянного тока нагружается магнитным тормозом.
Значения KP, TI и TD, рассчитанные в разделе 4, требуют дальнейшей настройки для плавной работы системы. Реакция на ПИ регулятор удовлетворяет требованиям. При изменении нагрузки, выход контроллера быстро достигает установившегося значения. Установлено, что ошибка регулирования с ПИ регулятором не превышает 2%.
Применение ПИД-регулятора не приводит к желаемому результату. Несмотря на то, что реакция происходит быстро и ошибка регулирования не превышает 2%, в системе присутствуют колебания. Генерируемый ШИМ был неустойчив и присутствовали колебания заданного значения, что видно на осциллограммах в разделе 8. Требуется дальнейшая настройка ПИД-регулирования с использованием другого алгоритма, отличного от правил Циглера-Никольса.
Был успешно реализован ПИД-регулятор для управления скоростью вращения двигателя постоянного тока. Исследована реакция системы на изменение нагрузки и результат оказался удовлетворительным. Установлено, что для управления системой первого порядка, такой как двигатель постоянного тока, для достижения желаемой производительности достаточно использование ПИ-регулятора.
Дальнейшая работа будет направлена на проектирование ПИД-регулятора с использованием более качественных алгоритмов настройки. Можно произвести запись реакций системы с помощью микроконтроллера для построения их на персональном компьютере.
[1] I.J.Nagrath and M.Gopal, Engineering Systems Engineering, (Wiley Eastern Limited). [2] Уильям Пальм III, Моделирование, анализ и управление динамическими системами, 2-е издание, Джон Wiley and Sons. [3] Datasheets LM2907N, LM339 National Semiconductors. [4] Технический паспорт TL084, TL071, Texas Instruments