
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження, заплановані результати
- 3. Теоретична частина
- 3.1 Загальні відомості про машину подвійного живлення (МПЖ)
- 3.2 Вибір досліджуваних двигунів і їх характеристики
- 3.3 Математичний опис АД
- 4. Система регулювання реактивної потужності і швидкості АД
- 4.1 Опис функціональної схеми системи управління
- Висновки
- Список джерел
Вступ
У сучасній світовій економіці, енергетика, являє собою системоутворюючу галузь, яка в останні 15 років розвивається випереджальними темпами. Зростання чисельності населення, а також розвиток науково-технічного прогресу, веде до експоціональному зростання потреби в енергії. В даний час основною сировиною, використовуваною для виробництва енергії в світі, те що добувається з надр землі – вуглеводневе паливо (нафта, газ і угль). Підвищення потреби в енергії викликає необхідність у збільшенні видобутку вуглеводнів, в результаті чого відбувається виснаження їх запасів. Повсюдне використання вуглеводневого палива в усіх галузях економіки та відсутність реальної альтернативи їх заміні, роблять економіку країни вразливою до ризиків, пов'язаних з природно-кліматичними та економічними проблемами. Крім того, використання даного виду палива, викликає значне число екологічних проблем, негативний ефект яких уже очевидний в масштабах планети, в результаті чого розвиток альтернативних джерел енергії є одним з актуальних напрямків у галузі побудови енергетики майбутнього. [1]
1. Актуальність теми
Актуальність роботи визначається переходом сучасного промислового виробництва до застосування енергозберігаючих технологій. Використання машини подвійного живлення (МПЖ) в сучасних автоматизованих системах дозволяє істотно підвищити техніко-економічні показники різних технологічних установок. Наприклад, одним з найбільш перспективних напрямків є використання енергії вітру в асинхронної машині з прямим живленням з боку статора і живленням через оборотний перетворювач з боку ротора [2]:
- віддача активної потужності з боку статора при змінній частоті обертання і постійній частоті мережі;
- віддача активної потужності з боку ротора при частоті обертання вище номінальної;
- мала встановлена потужність перетворювача.
Одним з основних напрямків переходу є заміна існуючих регульованих електроприводів (ЕП) постійного струму на електроприводи змінного струму, що володіють кращими масогабаритними, енергетичними та динамічними характеристиками. Найбільшого поширення серед електроприводів змінного струму отримав ЕП на базі асинхронного двигуна з короткозамкненим ротором (АДКЗ) з перетворювачем частоти в ланцюзі обмотки. Використання в даному електроприводі режиму векторного регулювання дозволяє розділяти канали управління потокозчепленням і електромагнітним моментом, що дає можливість будувати системи підлеглого регулювання аналогічно ЕП постійного струму. Однак електропривод на базі АДКЗ має деякі недолікі, а саме: низька перевантажувальна здатність на частотах обертання ротора вище номінальної, невисокий діапазон регулювання швидкості вниз від номінальної (без датчика швидкості на валу двигуна) і неможливість управління енергією ковзання. Діапазон регулювання швидкості вниз від номінальної без датчика на валу двигуна зазвичай не перевищує 1:50, що пов'язано зі складністю забезпечення роботи векторної системи управління на низьких частотах струму статора. Для забезпечення глибокого регулювання швидкості вниз від номінальної необхідно використовувати датчик на валу, який знижує надійність електроприводу. Усунення зазначених вище недоліків можливо в електроприводі на базі машини подвійного живлення (МПЖ).
2. Мета і задачі дослідження, заплановані результати
Магістерська робота присвячена дослідженню машини подвійного живлення з прямим живленням з боку статора і живленням через оборотний перетворювач з боку ротора.
Мета досліджень: опис принципів роботи електроенергетичної установки на базі МПЖ для використання енергії вітру.
Для досягнення поставленої мети, необхідно вирішити такі завдання:
- вивчити фізику процесів МПЖ;
- розробити математичні моделі МПЖ;
- розробити систему керування електроприводом на базі МПЖ, яка передбачає віддачу енергії вітру в мережу.
3. Теоретична частина
3.1 Загальні відомості про машину подвійного живлення (МПЖ)
Перш ніж перейти до конкретного опису математичної моделі МПЖ, розглянемо, що собою являє така машина. Машина подвійного живлення — конструктивно це асинхронна машина з фазним ротором, що має роздільне живлення обмоток статора і ротора, при цьому сума (різниця) частот струму живлення кратна частоті обертання валу.
Наприклад, якщо обмотка статора двигуна запитана частотою 50 Гц, а обмотка фазного ротора — частотою 10 Гц, то частота обертання (при двополюсних обмотках) ротора може бути, в залежності від порядку чергування фаз ротора, 40 або 60 об / сек. Але принцип дії МПЖ відповідає синхронній машині, оскільки струми в роторі виходять не за рахунок ковзання останнього щодо поля статора, а за рахунок подачі струму від зовнішнього джерела. МПЖ можуть працювати як в руховому, так і в генераторному режимі [3].
Недоліками машин подвійного живлення є:
хитання
ротора, аналогічнехитанню
у звичайних синхронних машинах, що може викликати випадання з синхронізму;- наявність ковзних контактів для передачі струму на ротор. На відміну від синхронних машин, потужність, що подається на ротор – може досягати половини всієї потужності машини (у синхронної машини приблизно 1-5%). Ця потужність приблизно пропорційна частоті струму живлення. Цей недолік вдалося усунути в безконтактної машині подвійного живлення.
Переваги машин подвійного живлення:
- можливість роботи з частотою обертання валу 6000 об / хв при живленні від промислової мережі і, як наслідок, отримати подвоєну потужність при тих же розмірах, значеннях магнітного потоку і крутного моменту;
- використання для управління двигуном статичних перетворювачів половинній потужності;
- можливість подвоєння напруги в генераторі за рахунок послідовного з'єднання обмоток статора і ротора.
3.2 Вибір досліджуваних двигунів і їх характеристики
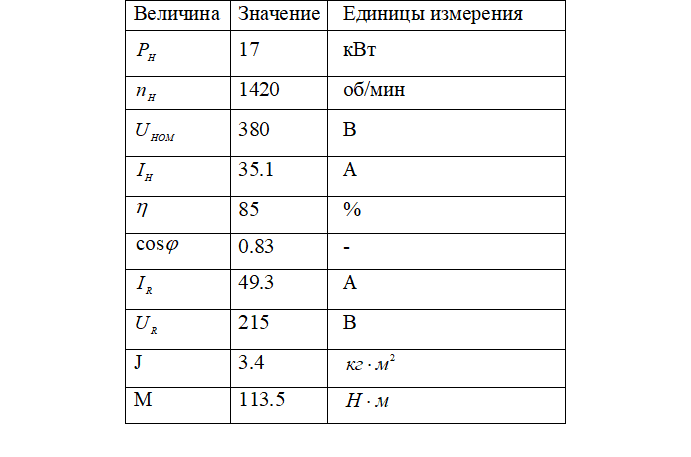
При проведенні дослідження машини подвійного живлення, для спрощення обчислень і аналізу результатів, візьмемо будь-яку асинхронну машину з фазним ротором в якості предмета дослідження. Наприклад, візьмемо АД типу АОК2-51-4Т2. Його технічні дані наведені нижче в таблиці 1.1.
Таблиця 1.1 – Технічні дані двигуна №1 [4]
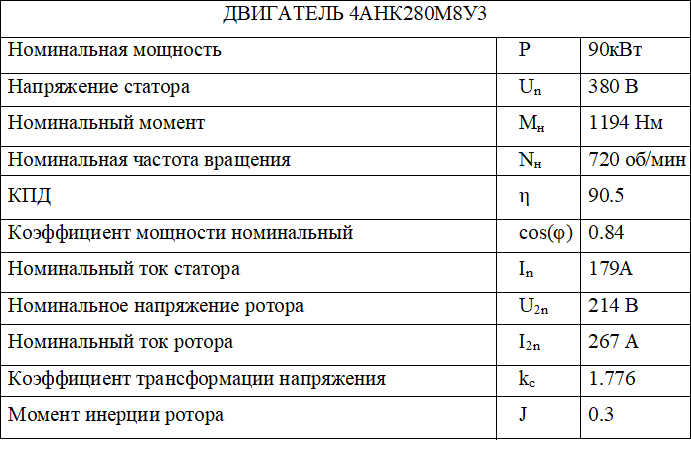
Для перевірки методики реалізації регуляторів потужності і швидкості, візьмемо ще один АД з фазним ротором типу 4АНК280М8У3. Його характеристики наведені в таблиці 1.2.
Таблиця 1.2 – Технічні дані двигуна №2 [5]
3.3 Математичний опис АД
При векторному керуванні з боку ротора, як одним з можливих, є використання закону керування ΨS=const.
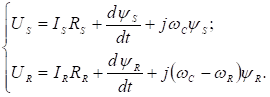
Введемо узагальнені вектори напруг US і UR, струмів IS і IR, потокозчеплення ΨS і ΨR статора і ротора за допомогою математичного опису, званого рівняннями Парка-Горєва.
Рівняння балансу напруг ланцюгів статора і ротора мають вигляд:
Рівняння зв'язку між струмами і потокозчепленням:
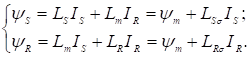
Користуючись рівняннями балансу напруг ланцюгів статора і ротора, а також рівняннями зв'язку між струмами і потокозчепленням, виключимо вектори IS,ΨR за допомогою рівнянь:
![]()
В результаті після перетворень можна отримати рівняння балансу напруг статора і ротора АД:

![]()
де ![]() –
–
еквівалентний активний опір АД;
TS=LS/RS – постійна часу ланцюга ротора АД.
Розкладемо останні рівняння на складові з урахуванням умови ![]() .
В результаті можна отримати дві системи скалярних рівнянь:
.
В результаті можна отримати дві системи скалярних рівнянь:

![]()
Друге рівняння являє собою умову точної орієнтації системи координат d,q по вектору потокозчеплення статора.
 ,
,
де ΨSq=0, kS=Lm/LS –
коефіцієнт електромагнітного зв'язку статора.
Рівняння електромагнітного моменту вийде у вигляді:
![]()
Використовуючи отримані рівняння, а також рівняння руху,
![]()
можна побудувати структурну схему, де ![]() еквівалентна постійна часу електромагнітних контурів АД.
еквівалентна постійна часу електромагнітних контурів АД.
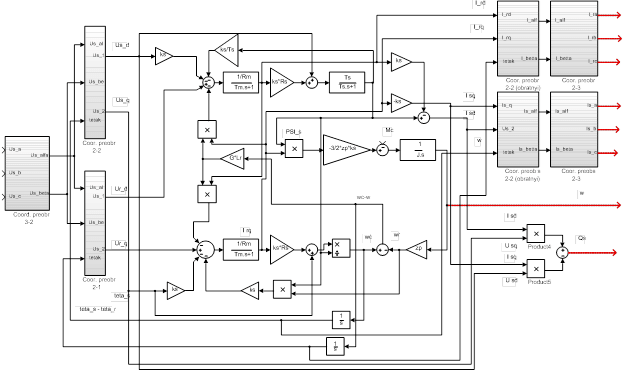
Рисунок 1 – Структурна схема АД при управлінні з боку ротора з регулюванням потокосцепления статора
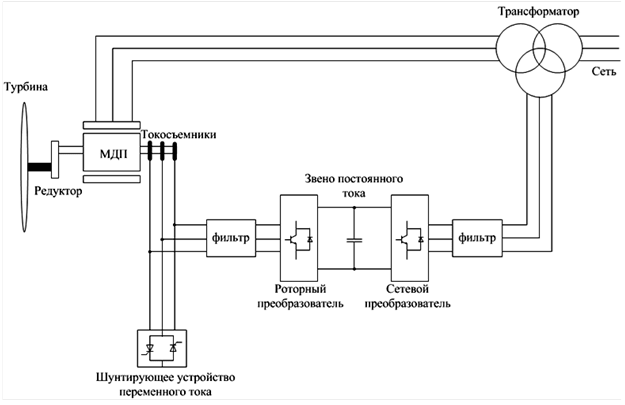
Рисунок 2 – Компоненти машини подвійного живлення
Рисунок 3 – Потік активної потужності МПЖ під час роботи на сверхсінхронной і субсінхронний швидкостях [6]
(анімація: 4 кадра, 7 циклів повторення, 27 кілобайт)
Гранично досяжні динамічні характеристики приводу з урахуванням заданих фізичних обмежень його енергетичного каналу можна отримати тільки в системах з релейними принципами управління, так як саме вони дозволяють максимально використовувати наявний в системі ресурс управління. Часто це досягається на шкоду енергетичними показниками електроприводу, наприклад, супроводжується збільшенням додаткових втрат системи інвертор напруги - двигун
, що викликаються високочастотними комутаціями ключів інвертора.
Релейний контур струму реалізує ковзний режим стеження за миттєвими значеннями струмових помилок, формує енергетично ефективні алгоритми перемикання ключів інвертора, нечутливий до параметрів двигуна і до обмежених за величиною помилок вимірювання вектора еквівалентної напруги, забезпечує максимально повне використання наявного в приводі ресурсу управління в динамічних режимах великих відхилень струмових помилок.
До переваг використання в СУ релейних регуляторів відноситься:
- астатизм до параметричних і координатних збурень;
- висока точність і швидкодія;
- можливість роботи в режимі енергозбереження за рахунок зменшення числа комутацій.
4. Система регулювання реактивної потужності і швидкості АД
4.1 Опис функціональної схеми системи управління
Система управління МПЖ умовно розділяється на управління роторним і статорним перетворювачами. На рисунку 4 представлена структурна схема системи управління роторним перетворювачем [6].
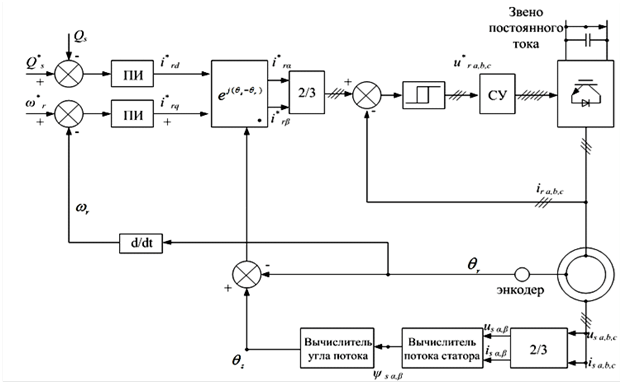
Рисунок 4 – Структурна схема векторного управління роторного перетворювача з використанням релейного регулятора струму ротора
Опорна q-складова струму ротора i*rqможе бути отримана або з зовнішнього контуру регулювання швидкості (ЗРШ) або від опорного крутного моменту, прикладеного до машини. Ці два варіанти можуть називатися системою керування швидкості або системою управління моментом для генератора, замість регулювання активної потужності безпосередньо. Для системи регулювання швидкості, один зовнішній ПІ-регулятор повинен контролювати сигнал неузгодженості і обмежуватися максимальною межею. Також, ще один ПІ-регулятор додається для отримання опорної d-складової струму ротора i*rd для регулювання реактивної потужності, необхідної від генератора. Якщо припустити, що вся реактивна потужність до машини подається з боку статора, то задане значення i*rd може дорівнювати нулю. Динамікою перемикання напівпровідникового роторного перетворювача можна знехтувати, і передбачається, що він може перейти в будь-який момент часу. У даній системі управління вимірюються струми статора і ротора, напруги статора і механічне положення ротора. Немає необхідності вимірювати ЕРС-індукції ротора, як у випадку з комутованими перетворювачами. Так як статор підключений до мережі, а також вплив опору статора мало, струм намагнічування статора можна вважати постійним. Роторний перетворювач забезпечує різну частоту збудження в залежності від умов навантаження, наприклад, швидкості вітру. Індукційна машина управляється в синхронно обертаємої системі координат dq, де ось d орієнтована уздовж вектора потоку статора і вони збігаються. Це називається орієнтацією векторного управління по потоку статора. Таким чином здійснюється роздільне управління між електромагнітним моментом і струмом збудження. Отже, активна потужність і реактивна потужність управляються незалежно один від одного [7].
Кут потокосцепления статора обчислюється за формулою:
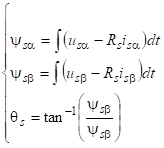
де θs – кут повороту системи координат, що обертається синхронно з вектором потокозчеплення статора, (θs-θr) – кут повороту системи координат ротора.
Схожий принцип управління через dq струми виконаний і для напівпровідникового мережевого перетворювача, де таким же способом здійснюється управління dq струмами перетворювача.
На рисунку 5 представлена структурна схема системи управління мережевим перетворювачем.
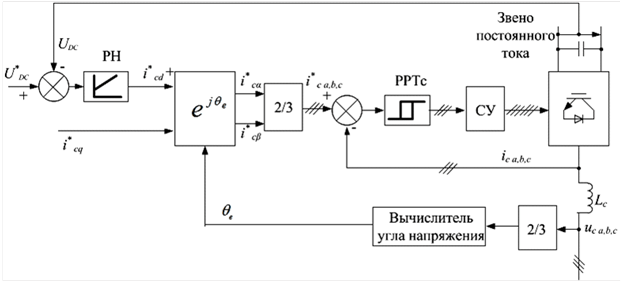
Рисунок 5 – Структурна схема векторного управління мережевого перетворювача з використанням релейного регулятора струму статора
Мережевий перетворювач регулює величину що надходить в мережу активної і реактивної потужності за допомогою взаємодії з мережевою індуктивністю. Метою мережевого перетворювача є підтримка постійної напруги в ланцюгі постійного струму незалежно від величини і напрямку потужності ротора. Метод векторного управління використовується з системою відліку орієнтованої по положенню вектора потокозчеплення статора і дозволяє незалежно управляти активної і реактивної потужністю, що протікає між мережею та перетворювачем [8].
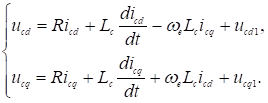
Рівняннями напруги в синхронно обертаємої системі координат-dq є:
Кутове положення напруги обчислюється як:
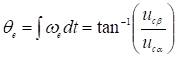
де ucα і ucβ є нерухомими складовими напруги мережевого перетворювача.
Ось d системи відліку знаходиться відносно напруги в кутовому співвідношенні θe. Оскільки амплітуда напруги є постійною, то ucd=0, ucq=const. Активна і реактивна потужність буде пропорційна icd і icq відповідно. Це демонструє, що активна і реактивна потужність мережевого перетворювача управляються зміною складових струму icd та icq.
4.2 Обчислення реактивної потужності. Об'єкт регулювання реактивної потужності.
Реалізований в моделі регулятор реактивної потужності працює в режимі забезпечення сталості заданої реактивної потужності МДП (Q*). Забезпечення сталість видачі або споживання реактивної потужності МДП в експлуатаційних режимах МДП використовуються часто. Наприклад, як показав аналіз технічних характеристик сучасних ВЕУ, він реалізується практично у всіх схемах управління, оскільки дозволяє організувати роботу ВЕУ з нульовим балансом реактивної потужності. Регулятор формує сигнал струму Idr на основі різниці заданої реактивної потужності Q* і діє на даний момент часу потужності Q.
Структурна схема регулятора представлена на рисунку 6.
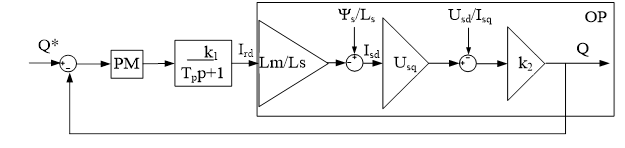
Рисунок 6 – Структурна схема регулятора реактивної потужності
Обчислення реактивної потужності в моделі дослідження МДП будуть проводитися за формулою:

Підсистема обчислення активної, реактивної і повної потужності представлена на рисунку 7.
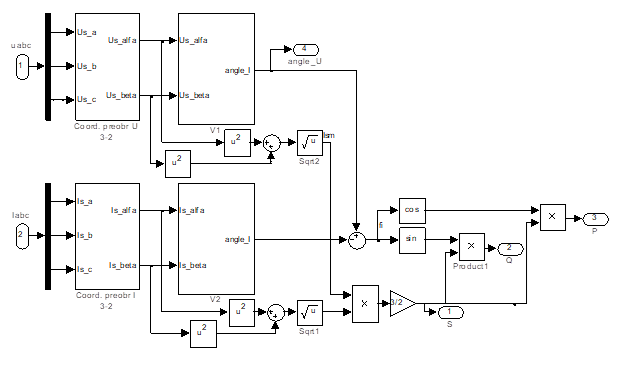
Рисунок 7 – Підсистема обчислення потужностей
Для регулювання реактивної потужності виберемо І-регулятор. Підсистема регулятора представлена на рисунку 8.
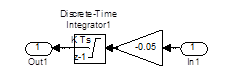
Рисунок 8 – Регулятор реактивної потужності
Налаштування регулятора виконується експериментальним шляхом. При цьому відключається зовнішній контур регулювання швидкості. Значення реактивної потужності задаються за допомогою блоку Step і після аналізу графіків, вибирається найбільш оптимальний коефіцієнт регулятора. Експериментальним шляхом було встановлено, що для двигуна 4АНК280М8У3 оптимальний коефіцієнт Ki=-0.05, для двигуна АОК2-51-4Т2 – Ki=-1.
4.3 Регулювання швидкості АД
Регулятор формує сигнал струму Irq на основі різниці заданої швидкості w* і діє на даний момент часу швидкість w. Контур регулювання швидкості є зовнішнім по відношенню до контуру регулювання потужності. Структурна схема регулятора швидкості представлена на рисунку 9.
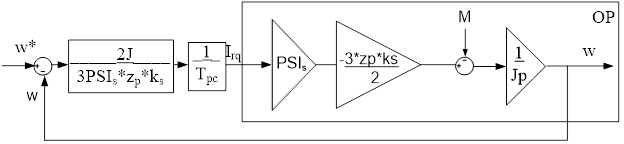
Рисунок 9 – Структурна схема регулятора швидкості
Регулятор швидкості представлений на рисунку 10.
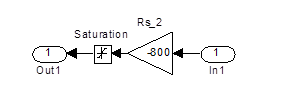
Рисунок 10 – П-регулятор швидкості
Налаштування П-регулятора швидкості здійснюється також експериментальним методом і виконується при налаштованому регуляторі потужності. Були визначені наступні оптимальні коефіцієнти:
для двигуна 4АНК280М8У3 Kp=-800 ;
для двигуна АОК2-51-4Т2 Kp=-200.
5. Моделювання
5.1 Загальна модель, її опис та принцип роботи.
На рисунку 11 представлена початкова модель дослідження машини подвійного живлення.
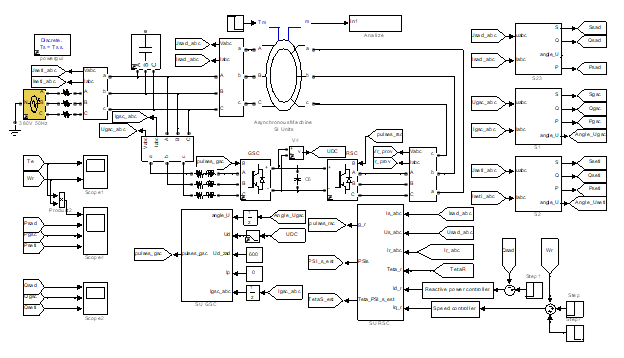
Рисунок 11 – Модель дослідження машини подвійного живлення
Машина подвійного живлення (Asynchronous Machine SI Units) підключається обмотки і роторної обмотками до джерела живлення (мережі 380V 50Hz). Статорна обмотка підключається до мережі через трифазний вимір напруг і струмів статора. Роторна обмотка підключається до роторного перетворювача (RSC) через трифазний вимір, далі до мережевого перетворювача (GSC). Між роторним і мережевим перетворювачем утворюється ділянка постійного струму з паралельно включеним конденсатором (C6). Також на ділянці постійного струму знімається напруга (UDC) вольтметром (V4). Після мережевого перетворювача підключається RLC-блок (враховує опір і індуктивність реальних провідників), і через трифазне вимір підключається до мережі. Регульовані величини задаються блоками Step.
Розглянемо докладніше елементи моделі [10].
На рисунку 12 представлений блок трифазного вимірювання напруги і струму. Даний елемент кілька разів використовується в моделі для вимірювання струмів і напруг мережі, обмотки ланцюга, роторному ланцюзі до перетворювачів і після.
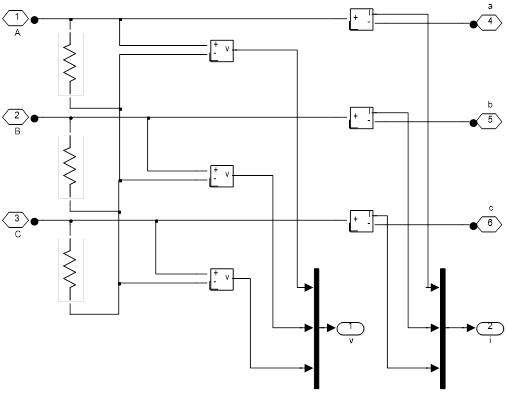
Рисунок 12 – Блок трифазного вимірювання напруг і струмів
На рисунку 13 представлена підсистема «SU GSC». Ця підсистема формує керуючий сигнал для мережевого перетворювача.

Рисунок 13 – Векторне управління мережевим перетворювачем
Мережевий напівпровідниковий перетворювач регулює величину що надходить в мережу активної і реактивної потужності за допомогою взаємодії з мережевою індуктивністю. Метою мережевого напівпровідникового перетворювача є підтримка постійної напруги в ланці постійного струму незалежно від величини і напрямку потужності ротора, віддача і споживання потужності мережі. Метод векторного управління використовується з системою відліку орієнтованої по положенню вектора потокозчеплення статора і дозволяє незалежно управляти активної і реактивної потужністю, що протікає між мережею та перетворювачем.
На рисунку 14 представлена підсистема «SU RSC». Ця підсистема формує керуючий сигнал для роторного напівпровідникового перетворювача.
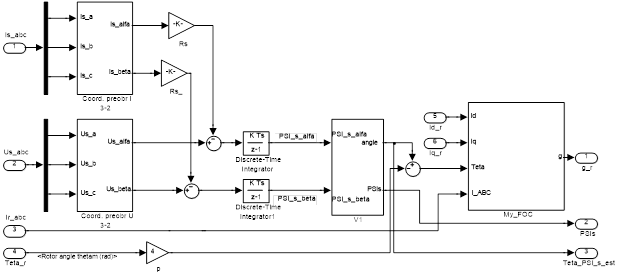
Рисунок 14 – Векторне управління роторним перетворювачем
5.2 Результати моделювання. Регулювання реактивної потужності при постійній швидкості
Результати моделювання при початкових умовах (w*=1, Q*=20 > 50> -10кВА)
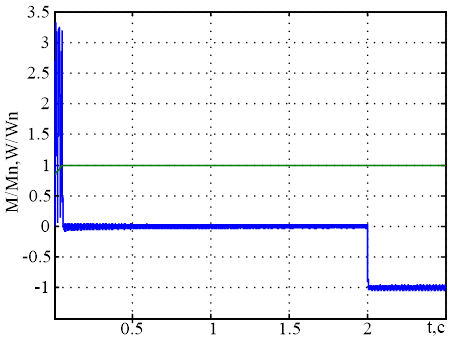
Рисунок 15 – Графіки моменту і швидкості (w*=1, Q*=20 > 50> -10)
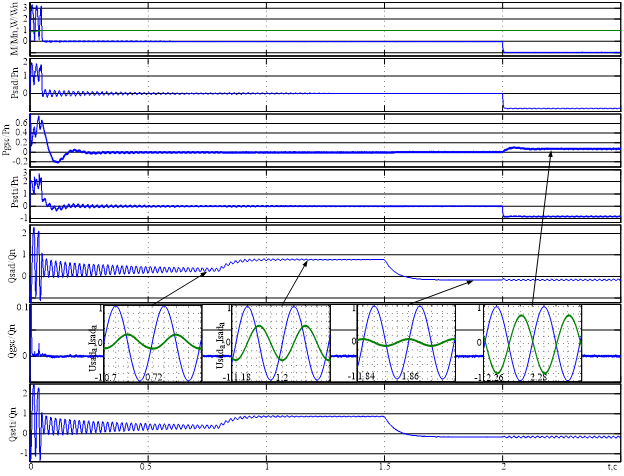
Рисунок 16 – Графіки активних і реактивних потужностей, моменту і швидкості (w*=1, Q*=20 > 50> -10кВА)
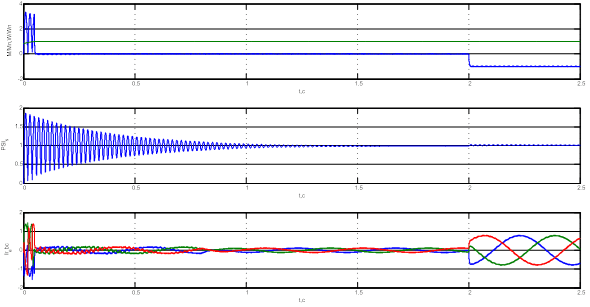
Рисунок 17 – Графіки моменту, швидкості, потоку статора і струмів ротора(w*=1, Q*=20 > 50> -10кВА)
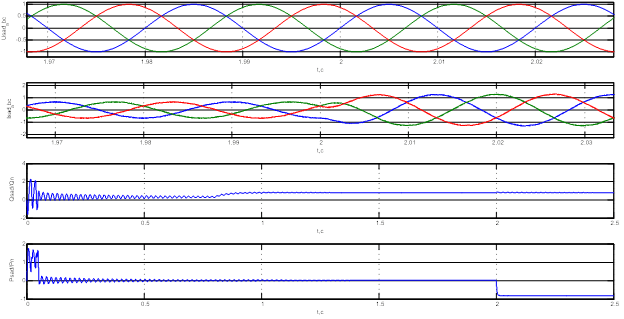
Рисунок 18 – Графіки струмів і напруг статора, реактивна і активна потужності статора (w*=1, Q*=20 > 50> -10кВА)
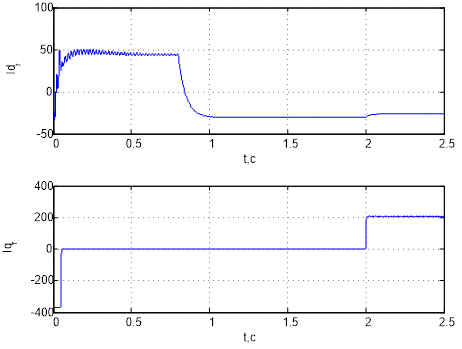
Рисунок 19 –Графіки dq складових струму ротора
(w*=1, Q*=20 > 50 > -10кВА)
Висновки
Відповідно до мети та завданнями магістерської роботи проведені теоретичні дослідження машини подвійного живлення. Були описані загальні відомості про машину подвійного живлення (МПЖ) та які саме системи координат використовуються при моделюванні. Також були описані досліджувані двигуни, їх характеристики і схеми заміщення, наведено математичний опис асинхронного двигуна.
При розробці системи регулювання реактивної потужності і швидкості, була приведена інформація про властивості схем систем управління і обчислення реактивної потужності. Описани об'єкти регулювання реактивної потужності і швидкості, а також настройка регуляторів.
На підставі функціональних схем була розроблена і досліджена система управління електроприводом. Дослідження динамічних властивостей системи управління електроприводу в типових режимах роботи було виконано на математичній моделі за допомогою пакета MATLAB і його додатку SIMULINK. Наведено загальний опис досліджуваної моделі, а також її окремих елементів.
Також наведені результати моделювання в певному режимі роботи.
На момент написання даного реферату магістерська робота ще не завершена. Орієнтовна дата завершення магістерської роботи: червень 2018 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Стекленев А.С. Проблемы и перспективы использования альтернативных источников энергии в Российской Федерации [Электронный ресурс]. – Режим доступа: http://sntbul.bmstu.ru/doc/...
- Понкратов А.С, Мирошник Д.Н. Использование машины двойного питания в качестве генератора переменного тока [Электронный ресурс]. – Режим доступа: http://masters.donntu.ru/2015/...
- Машина двойного питания [Электронный ресурс]. – Режим доступа: https://ru.wikipedia.org/wiki/...
- Dr J.Fletcher, J.Yang Introduction to Doubly-Fed Induction Generator for Wind Power Applications [Электронный ресурс]. – Режим доступа: https://www.google.com.ua/url?sa=...
- Безденежных Д.В. Разработка и исследование электропривода на базе машины двойного питания с подключением обмоток статора и ротора к преобразователям частоты/дисс. канд. техн. наук/Липецк. – 2011. – 380 с.
- Понкратов А.С. Анализ электромагнитных преобразований энергии в машинах двойного питания: магистерская работа. ДонНТУ, Донецк – 2015.
- Белей В.Ф. Реактивная мощность ветроустановки на базе асинхронного генератора/ В.Ф. Белей// Электрооборудование судов и электроэнергетика: сб. науч. тр./ КГТУ. – Калининград: Изд-во КГТУ. – 2000.
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты/Р.Т. Шрейнер. – Екатеринбург.: УРО РАН, – 2000. – 654 с.
- Мещеряков В.Н., Безденежных Д.В. Способы управления асинхронным двигателем с фазным ротором по статорной и роторной цепям // Материалы региональной научно-технической конференции
Автоматизация и роботизация технологических процессов
. Воронеж: ВГТУ, 2009. - Мещеряков В.Н., Безденежных Д.В. Электропривод на базе машины двойного питания с подключением обмоток статора и ротора к преобразователю частоты // Сборник статей научно-технической конференции, посвященной 35-летию кафедры электропривода Липецкого государственного технического университета. Липецк: ЛГТУ, 2009.