Рисунок 1 – Электропривод
Автор: Ranvir Kaur, G.S. Brar
Перевел: Чернявский И.А.
Источник:Induction Motor Drives-A Literature Review
Асинхронные двигатели являются наиболее широко используемыми двигателями в промышленности. Около 60% промышленной электрической энергии преобразуется в механическую энергию с помощью насосов, вентиляторов, регулируемых скоростных приводов и машинных приспособлений оснащенных асинхронными двигателями. Однако современные тенденции и разработка методов контроля скорости асинхронного двигателя значительно расширили использование асинхронных двигателей в электроприводах. Таким образом,значительные исследовательские усилия были сосредоточены на таких вопросах, как моделирование и оценка параметров асинхронных двигателей.
Было высказано предположение о том, что электрические машины являются старым полем с ограниченными возможностями, в то время как в недавней работе изучается управление скорости машин, когда они приближаются к их пределам с точки зрения технических мер. Это ценные исследования, и мы обсудим эти мысли позже.
Электрическая машина прошла медленную, но устойчивую эволюцию в течение прошлого века. Появление мощных цифровых компьютеров, зарождающиеся и облегчая материалы, в сочетании с обширными исследованиями и разработками, привело к более высокой плотности мощности, более высокой эффективности и большому увеличению производительности машин. Драматические улучшения, которые требуются в производительности, надежности и экономичности электрических приводов, могут быть достигнуты только путем разработки интегрированного системного подхода на основе передовой компоновке полупроводниковых приборов и инновационных схем со встроенной функциональностью, пригодности для управления и универсальность приложений. Трехфазные асинхронные двигатели с точки зрения эффективности машины, надежности, надежности, долговечности, коэффициента мощности, ряби, стабильного выходного напряжения и крутящего момента [3]. При работе непосредственно от линейных напряжений они работают с почти постоянной скоростью. Однако с помощью силового электронного преобразователя можно изменять скорость асинхронного двигателя.
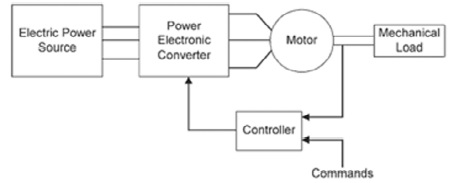
Основные элементы, необходимые в системе привода электродвигателей (как показано на Рисунке 1), включают:
Рисунок 1 – Электропривод
Цифровое управление асинхронными двигателями приводит к более эффективному функционированию двигателя, что приводит к увеличению срока службы и снижению мощности. Хотя сегодня применяются различные методы управления асинхронным двигателем. Во время запуска асинхронного двигателя сопротивление статора и индуктивность как ротора, так и статора должны поддерживаться на низком уровне, чтобы уменьшить время стабильного состояния, а также уменьшить рывки во время пуска. С другой стороны, более высокое значение сопротивления ротора приводит к меньшим рывкам, не влияя на установившееся время. Для анализа влияния переходных процессов на работу асинхронного двигателя выполняется динамическое моделирование. Для динамического моделирования трехфазного асинхронного двигателя преобразуют в двухфазную машину, а входная мощность [3,4] определяется:

где Rs – сопротивление статора на фазу, is собой ток статора, λs является комплексным сопряженным с фазовым соединением потока статора, ωs – частота статора, при которой обратные кадры вращаются.
В приведенном выше уравнении есть 3 различных компонента входной мощности. Первый член представляет собой потерю сопротивления статора, второй член представляет собой сумму мощности скольжения ротора и механической мощности, тогда как третий член представляет собой скорость изменения магнитной энергии.
В асинхронной машине потокосцепление можно контролировать с помощью фазового тока статора, который дополнительно контролирует электромагнитный крутящий момент.
В установившемся режиме скорость изменения магнитной энергии равна нулю, но имеет конечное значение во время переходных процессов. Для управления индукционной машиной это должно быть равно нулю во все времена работы. Это можно сделать равным нулю при следующих условиях:
Самый обыденный метод электронного управления мощностью переменного тока называется фазовым контролем. Рисунок 2 иллюстрирует эту концепцию. Во время первой части полупериода синусоидальной волны электронный переключатель открывается для устранения тока. При определенном фазовом углу α этот выключатель закрыт, чтобы обеспечить полное линейное напряжение для нагрузки для остатка этого полупериода. Варьирование α будет контролировать часть полной синусоидальной волны, которая применяется к нагрузке, и тем самым регулирует поток мощности к нагрузке.
Угол запуска может быть отложен до максимума до 180 градусов. Угол запуска, α задерживается, чтобы вызвать нулевой крутящий момент, и, следовательно, нагрузка замедляет двигатель. Изменяя фазу последовательности подачи, получается более быстрое изменение скорости двигателя. Также, двигатель работает напротив вращающегося магнитного поля. Это приводит к проскальзыванию более одного, что, в результате, приводит к работе тормозной области двигателя. Это замедлит двигатель намного быстрее [5]. Для поддержания тока статора в безопасных пределах увеличивается угол срабатывания. Запредельные токи в начале будут длиться очень короткое время.
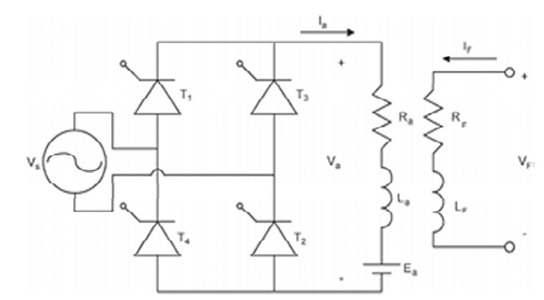
Рисунок 2 – Однофазный полноволновый управляемый выпрямитель
Угол запуска α будет управлять входом. Для заданного угла запуска α сложно вычислить угол проводимости β. Угол проводимости можно вычислить из эквивалентной схемы машины. Высокий угол срабатывания создает большие потери в машине.
1. T. Isao, N.Toshihiko, A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor
IEEE
Transactions on IndustryApplications, Vol. I A-22, Issue 5, pp. 820-82, 1986.
2. M.P. Kazmierkowski, L.G. Franquelo, J.Rodriquez, M.A.Perez, J.I.Leon, High Performance Motor drives
IEEE Industrial
Electronics Magazines,Vol. 5, Issue: 3, pp. 6-26,2011
3. P. Vas, Budapest Generalized transient analysis of induction motors
Archiv For ElektroTechnik Springer, pp. 307-312, 1978
4. V. Donescu, A.Charette, Z.Yao, and V.Rajagopalan Modeling and Simulation of Saturated Induction Motors in Phase Quantities
IEEE Transactions on Energy Conversion, Vol. 14, No. 3, pp. 386-393, 1999.
5. G.S.Buja, M.P. Kazmierkowski, Direct Torque Control of PWM Inverter-Fed AC Motors—A Survey
IEEE Transactions On Industrial Electronics, Vol. 51, No. 4, pp. 744-757,2004.