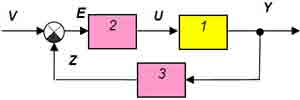
Рисунок 1 – Традиционная система: 1 – объект, 2 – последовательный регулятор, 3 – регулятор в обратной связи, ⊗ – вычитающее устройство (закрашенный сегмент означает инверсный вход)
Авторы: Жмудь В. А, ОАО НИПС
, ФГБОУ ВПО НГТУ
Источник: http://jurnal.nips.ru/sites/default/files/%D0%90%D0%98%D0%9F%D0%98-2-2014-11.pdf
В статье дан обзор структур адаптивных регуляторов для прецизионных систем. В основе лежит материал, полученный автором. Изложенные сведения позволяют эффективно разрабатывать, анализировать и модифицировать замкнутые динамические системы, обеспечивать их устойчивость и требуемую динамическую и статическую точность.
адаптивные системы, управление, регулирование, самонастраивающиеся системы
Адаптивностью называют способность системы изменяться при изменении внешних условий так, чтобы цель функционирования системы была достигнута, даже если изменения внешних условий препятствуют этому.
Принцип отрицательной обратной связи обеспечивает объекту управления адаптивные свойства низшего уровня. Действительно, выходная величина объекта в этом случае остается равной предписанному значению даже в том случае, если на объект действуют неконтролируемые внешние воздействия, которые при отсутствии обратной связи привели бы к существенным изменениям выходной величины объекта.
Однако таких адаптивных свойств в ряде случаев недостаточно. Отрицательная обратная связь может работать неэффективно, если ее динамические свойства не согласованы с динамическими свойствами объекта. Вместо стабилизации выходной величины объекта около требуемого значения, такая связь может привести к потере устойчивости системы, что проявляется в колебаниях около требуемого значения с нарастающей амплитудой или в ускоряющемся удалении этой величины от этого значения.
Поэтому если не только выходная величина объекта изменяется вследствие внешних причин, но и динамические свойства объекта также изменяются во времени, то требуется дополнительное адаптивное свойство системы, которое обеспечивает согласование динамических свойств основного контура с изменяющимися динамическими свойствами объекта.
Системы, реализующие этот принцип, называются адаптивными.
Для успешного проектирования адаптивной системы целесообразно проанализировать известные и предлагаемые структурные схемы таких систем, принципы их действия и вытекающие из этого достоинства и недостатки.
Рассмотрим систему автоматического управления в самом общем случае без контура адаптации, как показано на Рис. 1. Здесь используются функции времени, а также их преобразования по Лапласу, что позволяет в случае линейных систем рассчитывать переходный процесс на выходе элемента как процесс на его входе, умноженный на передаточную функцию, после чего следует сделать обратное преобразование для получения сигнала во временной области. Выходная величина системы Y(t), которую также можно называть выходным сигналом, должна повторять сигнал задания V(t). Здесь также использованы обозначения: E(t) – ошибка управления, U(t) – управляющий сигнал (управление, сигнал управления), Z(t) – сигнал обратной связи. Все величины взяты в терминах приращений к их равновесным состояниям вследствие действия отрицательной обратной связи.
Рисунок 1 – Традиционная система: 1 – объект, 2 – последовательный регулятор, 3 – регулятор в обратной связи, ⊗ – вычитающее устройство (закрашенный сегмент означает инверсный вход)
Пусть WK – передаточная функция блока с номером K. Указанная структура эквивалентна набору уравнений в операторной форме:
E=V-Z,
(1)
U=W2E,
(2)
Y=W1U
(3)
Z=W3Y
(4)
Из (1) – (4) легко выводится соотношение:
(5)
Следствия указанного соотношения широко известны в теории автоматического регулирования, однако краткая их формулировка полезна для дальнейшего изложения.
Следствие 1. Если W1W2 → ∞ и W3 > 0, то Y → V/W3
Следствие 2. Если W3=1, и W1W2 → ∞, то Y → V
Следствие 3. Если условия Следствия 2 выполняются лишь в ограниченной полосе частот, то выходной сигнал Y(t) должен повторять задание V(t). Но это будет иметь место лишь в случае, если в остальных областях частот дробь W1W2/(1+W1W2W3) не превращается в бесконечность. Это накладывает условия на знаменатель этой дроби, и как следствие, на поведение комплексной величины W1W2W3. Для выполнения этих условий как раз и проектируется регулятор.
Следствие 4. Элемент в обратной связи может быть заменен единичной связью: W3=1, а условия Следствия 3 могут быть выполнены за счет соответствующего вида W2 в зависимости от вида W1.
Следствие 5. Если W1 изменяется, а W3=1, то может оказаться, что для выполнения условий Следствия 3 следует изменять W2.
Следствие 6. При условиях следствия 3 ошибка управления близка к нулю в указанной ограниченной полосе частот: E ≈ 0.
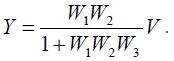
Рассмотрим типичную структуру адаптивной системы с адаптацией по входному сигналу, пример которой показан на Рис. 2 [Власов, 2007, с. 444, а также Антонов, 1984, с. 56].
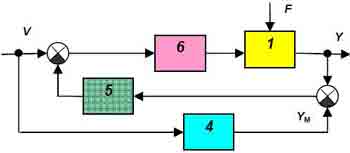
Рисунок 2 – Адаптивная система [Власов, 2007, с. 444]: 1 – объект, 6 – регулятор, 4 – эталонная модель (замкнутой системы), 5 – усилитель с большим коэффициентом, реализующий глубокую обратную связь
Предположительный принцип действия такой системы состоит в следующем. Если входной сигнал V(t) изменяется во времени, то это должно вызвать соответствующие изменения также и выходного сигнала системы Y(t). Допустимо, что сигнал Y(t) будет не полностью повторять входной сигнал V(t), а лишь совпадать с ним в ограниченной области частот, от нулевых до некоторой наперед заданной частоты.
То есть допустимо, чтобы система действовала как низкочастотный фильтр входного сигнала. Естественно, при этом природа выходного сигнала может быть любой, но этот сигнал в ходе работы системы измеряется некоторым датчиком и преобразуется в электрический, а датчик в схеме не показан, предполагается, что его передаточная функция равна единице. Блок 4 в схеме по Рис. 2 – это эталонная модель системы, то есть устройство, реализующее такое же преобразование входного сигнала V(t), какое должна осуществлять система. Поэтому выходной сигнал блока 4 YM(t) должен быть таким, каким должен быть выходной сигнал системы Y(t). Разница между выходными сигналами эталонной модели и реального объекта вычисляется вычитающим элементом и усиливается блоком 5, то есть усилителем с большим коэффициентом. Предполагается, что за счет действия отрицательной обратной связи в контуре эта ошибка будет сведена к нулю, поскольку любой устойчивый контур с отрицательной обратной связью сводит ошибку к нулю (Следствие 6).
Главный недостаток таких систем: при нулевом входном сигнале V(t)=0 выход блока 4 также будет равен нулю. Следовательно, систему можно в этом случае представить структурой, показанной на Рис. 3.
Рисунок 3 – Система, эквивалентная системе по Рис. 2 при нулевом входном сигнале: 1 – объект, 6 – регулятор, 5 – усилитель с большим коэффициентом
Из структуры Рис. 3 видно, что для устойчивости системы необходимо обеспечить устойчивость замкнутого контура, образованного объектом и последовательным соединением элементов 5 и 2. Если контур устойчив, то он устойчив при любых сигналах в нем, если он неустойчив, он также неустойчив при любых сигналах. Следовательно, если контур по Рис. 3 устойчив, то и система по Рис. 2 также устойчива и наоборот.
В постановке задачи синтеза адаптивной системы мы исходили из того, что модель объекта изменяется так, что невозможно обеспечить устойчивость замкнутого контура с неизменным последовательным регулятором. Если же структуру по Рис. 3 можно сделать устойчивой с неизменными параметрами блоков 5 и 2, то есть при фиксированных передаточных функциях этих блоков, соответственно, W5 и W6. Тогда можно в структуре по Рис. 1 положить
W3=1, W3=W5W6
(6)
В этом случае, при условии (6) структура по Рис. 1 будет устойчивой при всех изменениях параметра объекта. Иными словами, структура по Рис. 2 может быть эффективна лишь в случае, если может быть предложена эффективная структура по Рис. 1. Но предназначение структуры по Рис. 2 является задача проектирования регулятора для случаев, когда невозможно предложить эффективную структуру по Рис. 1. То есть эта структура может быть применена лишь тогда, когда она не требуется, и не может быть применена тогда, когда она необходима.
Поэтому в структуре по Рис. 2 контур адаптации практически не имеет смысла. В качестве стабилизирующей системы такая структура неэффективна. Проблема в том, что в этом контуре имеется один нестационарный элемент (объект), а другие остаются неизменными. Поэтому свойства такого контура не являются адаптивными.
Ниже на Рис. 4–20 приведены примеры таких адаптивных систем (АС) из литературы. Во всех этих примерах можно обнаружить указанные признаки их структуры. Математическая модель объекта не уточняется непосредственно в ходе работы системы.
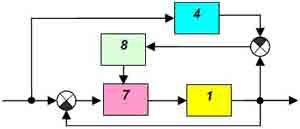
Рисунок 4 – АС из книги [Ким, 2007, с. 395]: 1 – объект, 7 – регулятор, 4 – эталонная модель, 8 – преобразовательно-исполнительное устройство
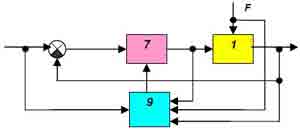
Рисунок 5 – АС из книги [Ким, 2007, с. 394]: 1 – объект, 7 – регулятор, 9 – адаптер
Во всех рассмотренных системах достаточно положить V(t)=0, чтобы обнаружить, что выходной сигнал некоторых блоков равен нулю, то есть данный блок не работает. Проделав соответствующие преобразования и осуществив такие же рассуждения, которые были проделаны в отношении структуры по Рис. 2, мы придем к выводу, что все предлагаемые на Рис. 4–20 структуры могут быть эффективными лишь в специальном случае. А именно: если принципиально возможно отыскание такого последовательного регулятора, при котором система с ним и с данным объектом будет эффективна при всех возможных изменениях параметров модели этого объекта. То есть такие адаптивные
структуры эффективны лишь в случаях, когда адаптивная система не обязательна, а можно обойтись обычным последовательным регулятором.
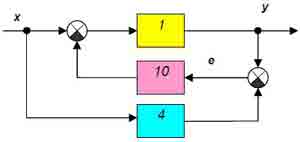
Рисунок 6 – АС из книги [Александровский, 1973, с. 13, а также Чаки, 1975, с. 254]: 1 – объект, 10 – регулятор, 4 – модель
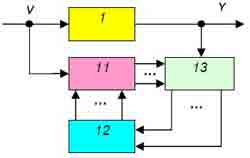
Рисунок 7 – АС из книги [Александровский, 1973, с. 18]: 1 – объект, 11 – синтезатор, 12 – автоматический оптимизатор (подстройка коэффициентов), 13 – вычислительное устройство
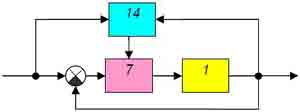
Рисунок 8 – АС из книги [Куропаткин, 1973, с. 482]: 1 – объект управления, 7 – регулятор, 14 – устройство самонастройки
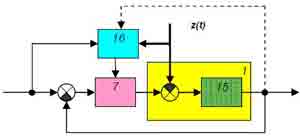
Рисунок 9 – АС из книги [Куропаткин, 1973, с. 483]: 1 – объект, 7 – регулятор, 16 – устройство самонастройки, 15 – передаточная функция объекта управления
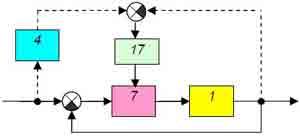
Рисунок 10 – СНС из книги [Куропаткин, 1973, с. 485]: 1 – объект, 7 – регулятор, 4 – модель замкнутой системы, 17 – устройство самонастройки
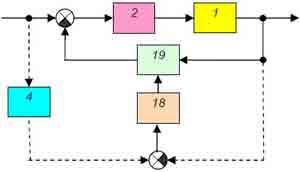
Рисунок 11 – АС из книги [Куропаткин, 1973, с. 485]: 1 – объект, 2 – регулятор, 4 – эталонная модель замкнутой системы, 18 – устройство самонастройки, 19 – главная (не единичная) обратная связь
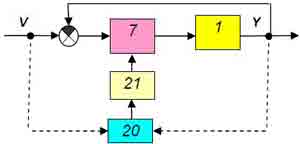
Рисунок 12 – АС из книги [Куропаткин, 1973, с. 486]: 1 – объект, 7 – регулятор, 20 – анализатор характеристик, 21 – устройство самонастройки
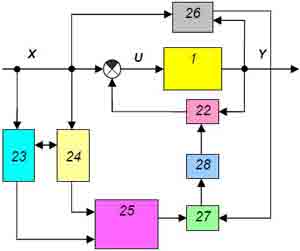
Рисунок 13 – СНС из книги [Солодовников, 1960, с. 520]: 1 – объект, 22 – управляемый регулятор (корректирующее устройство), 23 – вычислительное устройство, 24 – коррелятор, 25 – устройство вычисления оптимальной модели (импульсной передаточной функции) объекта, 26 – блок оценки реальной модели (импульсной передаточной функции) объекта, 27 – устройство сравнения, 28 – управляющее устройство
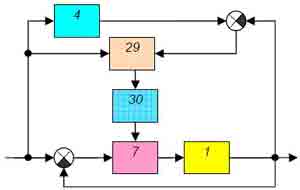
Рисунок 14 – СНС из книги [Антонов, 1984, с. 56]: 1 – объект, 7 – регулятор, 4 – эталонная модель, 29 – вычислительное устройство, 30 – исполнительный орган
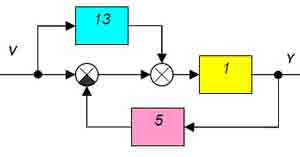
Рисунок 19 – СНС из книги [Антонов, 1984, с. 56]: 1 – объект и регулятор, 5 – регулятор в обратной связи (с большим коэффициентом), 31 – элемент, со специальным образом вычисляемой передаточной функцией
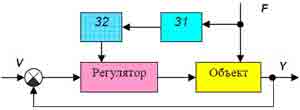
Рисунок 20 – СНС из книги [Власов, 2007, с. 441]: 31 – анализатор внешних сигналов, 32 – вычислитель
Системы со стабилизацией динамических свойств основного контура автоматического регулирования могут быть выделены в отдельный класс. В таких системах не осуществляется определение свойств динамической модели объекта в явном виде. В них определяется изменение функции качества или иные параметры функционирования замкнутой системы в целом и осуществляется изменение свойств регулятора так, чтобы качество этого контура сохранялось на заранее настроенном уровне или какая-нибудь характеристика качества достигала своего экстремального значения.
В этом подклассе можно выделить следующие подразделы:
Ниже приведены примеры таких систем.
На Рис. 21 приведена структура адаптивной системы из книги [Власов, 2007, с. 443]. В этой системе блок 33, содержащий анализатор внутренних условий и вычислитель, а также используемый желаемую модель прямого контура, анализирует входной и выходной сигналы прямого контура автоматического управления, то есть ошибку управления и выходной сигнал.
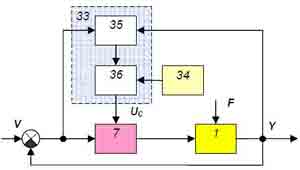
Рисунок 21 – АС из книги [Власов, 2007, с. 443]: 1 – объект, 7 – регулятор, 33 – корректирующее и вычислительное устройство, 34 – желаемая модель прямого контура, 35 – анализатор внутренних условий (сигналов), 36 – вычислитель
Желаемая модель заносится в вычислитель. Следовательно, вычислитель рассчитывает переходный процесс от ошибки, используя желаемую модель, сравнивает ее с переходным процессом, информация о котором получена с выхода объекта, и на этом основании должен корректировать модель регулятора.
Из сказанного и из представленной схемы видно, что для анализа работы этой схемы недостаточно сведений, поскольку не ясен алгоритм действия такой системы. Также следует отметить, что желаемая модель прямого контура без учета обратной связи – это крайне большое усиление во всей области рабочих частот, то есть тех частот, в которых выполняется условие Следствия 1. Об отклонениях фактической передаточной функции последовательного соединения объекта и регулятора можно сказать: во-первых, их трудно определить, во-вторых, они не существенны. Тем не менее, практически все структуры адаптивных систем можно обобщено представить именно такой укрупненной структурой, без деталировки, то есть содержит две особенности: анализатор сигналов 33 и управляемый регулятор 7, параметры которого задаются этим анализатором. При этом желаемую модель прямого контура 34 на схеме Рис. 21 вполне обоснованно можно было бы внести в состав анализатора 33 как его составную часть.
Рассмотрим схему по Рис. 22. Отметим, что измерение возмущающего воздействия F(t), как правило, невозможно, поэтому указанную связь мы показали пунктиром. Также связь от входного воздействия V(t) не должна быть определяющей, поскольку система должна работать успешно даже в случае, если этот сигнал равен нулю, как было сказано в предыдущем разделе. Кроме того, если известны выходной сигнал и ошибка, то входной сигнал может быть легко определен из соотношения (1) при условии Z(t)=Y(t):
V=Z+E
(7)
Поэтому связь от сигнала V(t) к блоку 33 мы также показали пунктиром. При отсутствии этих пунктирных линий схема Рис. 22 становится идентичной схеме Рис. 21.
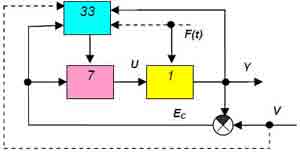
Рисунок 22 – АС из книги [Воронов, 1986, с. 486]: 1 – объект, 2 – регулятор, 3 – анализатор характеристик
Также к этой структуре сводится система из книги [Куропаткин, 1973, с. 483].
Типичная схема системы с пробной девиацией показана на Рис. 23.
Принцип действия такой системы понятен из ее структуры. Генератор 34 вносит тестовую девиацию в сигнал управления, добавляя к нему гармоническое колебание. Также величина выходного сигнала усилителя 35 анализируется последовательно включенными элементами: фильтром 36, выпрямителем 37 и фильтром 38.
Отметим недостатки этой структуры.
Во-первых, вместо усилителя 35 следовало бы использовать регулятор, то есть устройство, содержащее пропорциональный, интегрирующий и дифференцирующий тракты (или более сложную структуру). В представленной схеме если элемент 35 – только пропорциональный усилитель, то для большой части объектов задача успешного управления вообще не может быть решена даже при неизменной модели объекта.
Во-вторых, нецелесообразно отсутствие связи между генератором 34 и анализирующим трактом, содержащим элементы 36–38. При наличии такой связи можно также определять фазовый сдвиг в исследуемом контуре.
В-третьих, указанная схема стабилизирует амплитуду колебаний в контуре, то есть коэффициент подавления единственной выбранной частоты в контуре. Единственный путь стабилизации этой амплитуды – изменение коэффициента усиления усилителя 35. Такая система работоспособна и эффективна в каких-то специальных случаях, ее не целесообразно рекомендовать для широкого применения при управлении различными нестационарными объектами.
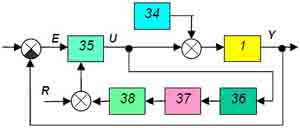
Рисунок 23 – АС из книги [Чинаев, 1969, с. 377]: 35 – управляемый усилитель, 1 – объект, 34 – генератор, 36 – фильтр, 37 – выпрямитель, 38 – фильтр, R – опорное напряжение
В-четвертых, в указанной схеме не используются сигнал ошибки и выходной сигнал объекта. Это не разумно, поскольку эти сигналы доступны для измерения и их использование позволило бы более эффективно управлять системой. Оправдание пренебрежения этими сигналами может состоять лишь в простоте структуры. Однако простота не должна достигаться за счет потери качества. В целом такая схема оправдана только на момент ее создания, в настоящее время она явно устарела.
Для устранения этих недостатков можно предложить структуру, показанную на Рис. 24.
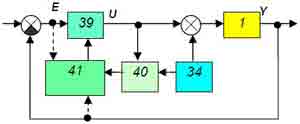
Рисунок 24 – Предлагаемая структура АС: 39 – управляемый регулятор, 1 – объект, 34 – генератор, 40 – синхронный детектор, 41 – анализирующее и решающее устройство
В данной структуре по Рис. 24 не достаточно подробно объяснен принцип действия блока 38. При необходимости эта структура может быть детализована подробно в различных вариантах, что составит предмет изобретательского творчества. Например, может быть предложена структура, показанная на Рис. 25.
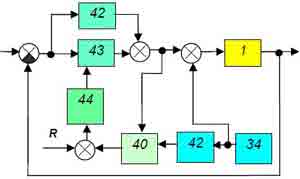
Рисунок 25 – Предлагаемая структура АС: 43 –дифференцирующий усилитель с управляемым усилением, 42 – ПИ-регулятор, 1 – объект, 34 – генератор, 42 – фазовращающий фильтр, 40 – синхронный детектор, 44 – интегратор или ПИ-регулятор
Основными недостатками устройств с ведением пробной девиации в виде сигнала, добавляемого в контур, является недостаточная точность ее работы и недостаточная эффективность самонастройки. Недостаточная точность имеет место вследствие того, что в рабочем состоянии в системе должны происходить колебания. Недостаточная эффективность настройки возникает вследствие недостаточно адекватной зависимости между настраиваемым параметром, которым является амплитуда колебаний, и действительным качеством настройки системы, которое связано с характеристиками ширины полосы рабочих частот, малости ошибки управления, устойчивости системы. Следствием этого является третий недостаток, который состоит в необходимости предварительной настройки системы по некоторым дополнительным критериям качества ее функционирования. Четвертым недостатком является узкая область применения этого метода, поскольку он эффективен только в случае, если единственным изменяющимся параметром объекта является его коэффициент усиления. Таким образом, это устройство не может обеспечить высокого быстродействия и высокой точности.
Нами разработано устройство, показанное на Рис. 26 [Жмудь и др. 2014, патент].
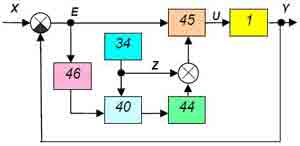
Рисунок 26 – АС с девиацией коэффициента усиления: 1 – объект, 45 – управляемый усилитель, 34 – генератор, 46 – устройство оценки качества системы, 40 – синхронный детектор, 44 – регулятор коэффициента
Поставленная задача решается тем, что, прежде всего, девиация вводится не в виде добавочного сигнала, а в виде приращения коэффициента усиления регулятора. Кроме того, предлагается в состав системы ввести устройство оценки качества системы и обеспечить настройку регулятора на наилучшее качество за счет действия дополнительного контура обратной связи, образуемого синхронным детектором и регулятором коэффициента.
Повышение точности достигается устранением колебаний выходной величины в рабочем режиме. Повышение эффективности достигается применением критерия, непосредственно связанного с показателем качества замкнутой системы, который вычисляется непрерывно или периодически в ходе функционирования системы.
На Рис. 27 показана АС из книги [Власов, 2007, с. 443], которая представляет собой типичную систему с эталонной моделью объекта.
В отличие от системы с эталонной моделью, которая задает отклик всей системы в целом на входной сигнал V(t), как, например, системы на Рис. 2, в данной системе эталонная модель задает предписанный отклик объекта на входное воздействие, т. е. управляющий сигнал U(t). Условия работы данного контура не требуют, чтобы сигнал задания (предписанного значения для выхода) V(t) изменялся во времени. Контур адаптации остается дееспособным и в том случае, если задание равно нулю (как в случае следящих систем), а работа всей системы направлена на отработку ненулевых начальных условий и (или) действия помехи F(t).
Задача цепей адаптации состоит в том, чтобы вычислить текущие динамические характеристики объекта 2, изменяющиеся под воздействием неизвестного и непредсказуемого внешнего воздействия F, анализатор 50 определяет параметры обратной модели и вводит их в вычислитель 51.
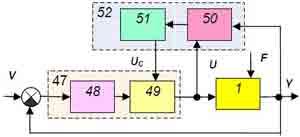
Рисунок 27 – АС из книги [Власов, 2007, с. 443]: 1 – объект, 47 – регулятор, 48 – желаемая модель прямого контура, 49 – обратная модель объекта управления, 50 – анализатор внутренних сигналов, 51 – вычислитель, 52 – корректирующее и вычислительное устройство
Эталонная модель в системе, показанной на Рис. 27, содержится в неявном виде. Она не учитывает воздействие F(t), а учитывает лишь входной сигнал (управление) U(t). Выходной сигнал объекта Y(t) должен быть таким, каким он был бы при отсутствии помехи. Отличие реального выходного сигнала от выходного сигнала эталонной модели объекта является ошибкой управления для контура адаптации. Обратная связь этого контура воздействует на регулятор, изменяя его параметры таким образом, чтобы выходной сигнал объекта был как можно ближе к выходному сигналу модели.
Достоинство такого технического решения по сравнению со структурой на Рис. 2 и аналогичными структурами состоит в его универсальности. Устранена зависимость от динамической активности сигнала V, т. е. он может быть как изменяющимся, так и постоянным, в том числе нулевым. Реализация этой схемы требует предварительной идентификации объекта с целью определения его характерной или ожидаемой математической модели, которую реализует блок 48. Для этой модели рассчитывается регулятор 47, состоящий из неизменной части 48 и изменяемой части 49. Предполагается, что изменяемая часть регулятора может изменяться под воздействием корректирующего сигнала UC(t), причем она является обратной по отношению к модели объекта. Иначе говоря, произведение передаточных функций элементов 49 и 2 равно единице в как можно большем диапазоне частот.
Это требование на практике никогда не достигается, однако можно обеспечить его приблизительное выполнение в некотором ограниченном сверху диапазоне частот. В этом диапазоне и должен рассчитываться и реализовываться регулятор в предположении, что за пределами этого диапазона отличие указанного произведения передаточных функций от единицы (в меньшую сторону) уже несущественно сказывается на динамических и статических характеристиках замкнутого контура управления.
На Рис. 35 показана АС из статьи [Якупов, с. 11]. Устройство предназначено для адаптации работы системы на основе объекта с изменяющимся параметром его математической модели. Оно работает, по утверждению авторов, следующим образом. Объект 1, регулятор 2 и вычитающее устройство образуют традиционную систему автоматического регулирования с регулятором и отрицательной обратной связью.
В исходном состоянии выходной сигнал адаптивного регулятора 57, образуемого элементами 54–56, равен нулю. На вход модели 53 поступает сигнал управления с выхода регулятора 2, который совпадает с сигналом управления, поступающим на вход объекта 1 через вычитающее устройство, так как на второй его вход подан нулевой сигнал. Адаптивный регулятор с помощью дифференцирующего фильтра 54, имеющегося в его составе, оценивает производную выходного сигнала объекта. Выходной сигнал и оценка его производной поступают на вычитающие устройства, на вторые (вычитающие) входы которых поступают выходной сигнал и его производная, вычисляемые эталонной моделью 53. Если реальная математическая модель объекта 1 совпадает с эталонной моделью 53, то выходные сигналы вычитающих устройств равны нулю, блок вычисления суммы с коэффициентами 55 формирует нулевой сигнал, который, поступая на нелинейный преобразователь 56, формирует нулевой сигнал коррекции. Этот сигнал в случае его нулевого значения никак не изменяет воздействие на объект. Таким образом, в случае совпадения модели объекта с эталонной моделью 53 адаптивный регулятор не производит никаких действий на систему.
Если вследствие возникших отличий модели реального объекта 1 от эталонной модели 53 выходной сигнал объекта станет отличаться от выходного сигнала эталонной модели, или его производная станет отличаться от вычисляемый на элементе 54 оценки производной выходного сигнала объекта, или если будут иметь место оба этих отличия, тогда, по крайней мере, один из выходных сигналов вычитающих устройств будет неравным нулю.
Это породит ненулевой сигнал на выходе блока вычисления суммы с коэффициентами 55. Этот ненулевой сигнал через нелинейный преобразователь 56 и вычитающее устройство будет дополнительно воздействовать на объект 1. Воздействие по знаку противоположно причине, которая его вызвала, что обеспечивается выбором знака обратной связи. Данное воздействие заставит объект изменить свои выходные сигналы таким образом, чтобы они были более близки к выходным сигналам эталонной модели.
В данной системе за счет одной обратной связи предполагается стабилизация двух величин: выходного сигнала объекта и его производной. В описании принципа ее действия предполагается, что воздействие на объект обеспечит коррекцию и его выходной величины, и ее производной, одновременно. Это аналогично последовательного ПД-регулятору, с тем отличием, что если переходный процесс соответствует желаемому виду, обратная связь как бы отключена. На этом основании можно сказать, что фильтрующие свойства передаточной функции модели 53 играют роль фильтра, включенного последовательно с регулятором. Этот фильтр должен обладать более широкой полосой пропускания, чем последовательный регулятор, образуемый пропорциональным каналом и каналом производной. Необходимость нелинейного преобразователя не пояснена, возможно, он нужен для ограничения управляющего сигнала по уровню.
По-видимому, эту систему можно модифицировать без потери работоспособности до вида, показанного на Рис. 36.
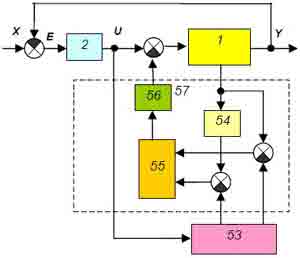
Рисунок 35 – АС с эталонной моделью из книги [Якупов, с. 11]: 1 – объект, 2 – регулятор, 53 – эталонная модель объекта, 54 – дифференцирующий фильтр, 55 – блок вычисления суммы с коэффициентами, 56 – нелинейный преобразователь, 57 – адаптивный регулятор
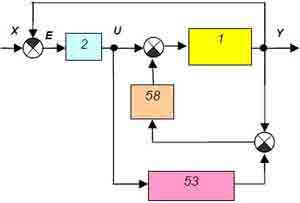
Рисунок 36 – Модифицированная (упрощенная) АС с эталонной моделью по сравнению с АС из Рис. 35: 1 – объект, 2 – регулятор, 53 – эталонная модель объекта, 58 – ПД-регулятор
На Рис. 37 показана АС с эталонной моделью из книги [Антонов, 1984]. Такая система целесообразна лишь в том случае, если известно возмущение, действующее на объект, а также известна передаточная функция объекта по возмущению. Принцип действия этой системы основан на компенсации возмущения соответствующей добавкой управляющего воздействия по входу и подавлении отклонения выходного сигнала от его требуемого значения за счет контура адаптации. Выходной сигнал эталонной модели 53 сравнивается с выходным сигналом реального объекта 6, разница подается в контур через корректирующее устройство 4. В отличие от системы, показанной на Рис. 34, в этой системе сигнал с выхода корректирующего устройства передается через сумматор не на выход регулятора, а на его вход.
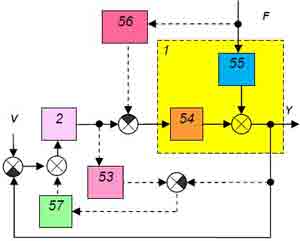
Рисунок 36 – Адаптивная АС с эталонной моделью из книги [Антонов, 1984]: 1 – объект, 2 – регулятор, 53 – эталонная модель, 57 – корректирующее устройство, 54 – передаточная функция объекта по управлению, 55 – передаточная функция объекта по возмущению, 56 – передаточная функция компенсирующей цепи
В класс Системы с идентификатором модели объекта
выделим системы, содержащие вычислительное устройство, которое в силу своей структуры и (или) алгоритма функционирования осуществляет идентификацию математической модели объекта. Иначе говоря, на протяжении работы устройства и в то самое время, когда основной контур за счет главной обратной связи обеспечивает равенство выходной величины ее предписанному значению, дополнительный контур обеспечивает устойчивость (и наилучшую настройку) этого контура именно за счет уточнения параметров модели объекта, которые могут медленно изменяться во времени. Естественно, что темпы изменения параметров модели объекта должны быть существенно ниже темпов переходных процессов в системе, но это замечание справедливо для всех адаптивных систем, кроме систем, осуществляющих обратную связь по полному вектору состояния объекта.
На Рис. 38 показана самая общая структура АС из книги [Антонов, 1984, с. 51]. Принцип ее действия ясен из рисунка. Блок идентификации, анализируя сигналы, поступающие на вход объекта и приходящие с его выхода, определяет математическую модель, которая задает зависимость между ними. Поскольку объект – реальное устройство, не всякая математическая зависимость может соответствовать его математической модели. Математическая модель отыскивается в классе допустимых функций. Чем больше информации об объекте, тем проще устроен и точнее работает блок идентификации. Блок самонастройки должен получать информацию о текущей модели объекта и на ее основе воздействовать на регулятор таким образом, чтобы изменить его параметры в нужную сторону и обеспечить наилучшие (или приемлемые) параметры основного контура управления. Недостатком структуры Рис. 38 является лишь ее неполнота. Другие структурные схемы в большей или меньшей степени подробности раскрывают принцип действия указанных двух блоков.
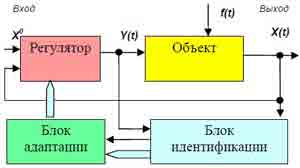
Рисунок 37 – АС из книги [Антонов, 1984, с. 51]
Схема, показанная на Рис. 38, отличается от схемы Рис. 37 наличием связи между входным сигналом системы и блоком идентификации.
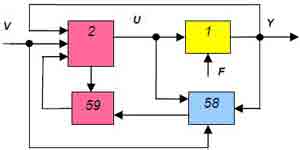
Рисунок 38 – АС из книги [Александровский, 1973, с. 11]: 1 – объект, 2 – устройство управления (регулятор), 58 – блок определения характеристик и настройки, 59 – модель
Кроме того, вместо блока адаптации используется модель объекта. По-видимому, это не верно, следует наряду с моделью иметь устройство, вычисляющее регулятор, название блок адаптации
вполне соответствует такому устройству, а модель объекта может содержаться в этом блоке как составной элемент, реализованный аппаратно или программно. На современном этапе развития техники, безусловно, модель целесообразно реализовать именно программно.
Структурная схема АС [Александровский, 1973, с. 57], показанная на Рис. 39, содержит больше деталей и раскрывает конкретный принцип идентификации объекта. Этот принцип основывается на моделировании отклика объекта моделью, которая составлена на основе априорных или накопленных в ходе эксперимента сведений об объекте. На вычитающем устройстве определяется разница между выходным сигналом реального объекта и выходным сигналом виртуальной модели. Эта разница через блок настройки управляет параметрами модели, приводя их в большее соответствие реальному объекту. Вычислительное устройство на основе получаемых уточненных сведений о модели осуществляет подстройку регулятора, воздействуя на него через исполнительный орган.
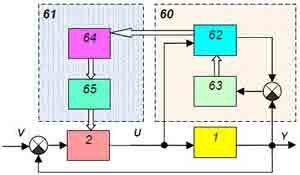
Рисунок 39 – Структурная схема из книги [Александровский, 1973, с. 57]: 1 – объект, 2 – регулятор, 62 – модель объекта, 63 – блок настройки модели, 64 – вычислительное устройство, 65 – исполнительный орган, 60 – блок идентификации, 61 – блок адаптации
В случае применения цифровых регуляторов, собранных на основе микропроцессоров с АЦП на входе и ЦАП на выходе, разбиение на блоки чисто условное: все функции регулятора, блока идентификации и блока самонастройки выполняет одно и то же цифровое устройство (микроконтроллер). В этом случае какого-либо специального исполнительного органа не требуется, знание о рассчитанном регуляторе достаточно для реализации его через вычисяемые численными методами сигналы по требуемой математической модели регулятора и по определенным с помощью АЦП сигналам с выхода объекта. Формирователь предписанного значения V(t) при этом также может быть частью этого цифрового устройства. Поэтому в структуре на Рис. 39 наиболее важной частью является контур со следящей моделью из элементов 63 и 62.
Из приведенной структуры следует, что только одно анализирующее устройство (вычитающий элемент) анализирует результаты изменения параметров объекта, а самих параметров, которые изменяются, может иметься множество. Если изменяется лишь один параметр и если его влияние на выходной сигнал однозначно, то указанный принцип действия может быть реализован. Но и в этом случае имеются препятствия к его действенной работе, поскольку на реальный объект воздействуют еще и возмущения (иначе называемые помехами), а на модель они не действуют, так как возмущениями мы называем те воздействия, которые не могут быть измерены.
Схема, приведенная на Рис. 40, из книги [Александровский, 1973, с. 204], отличается от предыдущей лишь тем, что в ней имеются предварительный фильтр, а регулятор разбит на два блока: регулятор в обратной связи и преобразователь в прямой ветви. С позиции обеспечения требуемых свойств основного контура последовательно соединенные элементы 2 и 67 составляют единый регулятор; принципиально лучшего эффекта их разбиением, как правило, не достигается, поскольку блок 67 назван преобразователем, это по сути датчик, преобразующий выходной сигнал объекта в электрический, его передаточная функция равна единице. Включенный на входе системы фильтр не изменяет устойчивости системы, а лишь корректирует спектр входного воздействия. Поэтому с позиции полезности рассмотренных структур для разработки АС эти схемы (Рис. 39 и 40) тождественны.
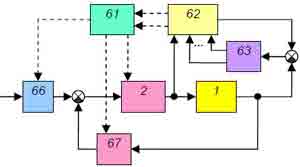
Рисунок 40 – Адаптивная система из книги [Александровский, 1973, с. 204]: 1 – объект управления с экстремальной характеристикой, 2 – регулятор, 62 – модель, 66 – фильтр, 67 – преобразователь (датчик выходного сигнала объекта), 63 – блок настройки модели, 61 – блок адаптации (устройство вычисления настройки)
Схема, приведенная на Рис. 41, отличается связью с входным сигналом, о чем уже было сказано: для следящих систем такая связь несущественна, а если она существенна для данной системы, ее следует отнести к классу систем с адаптацией по входному сигналу. Также в этой структуре имеется связь с объектом. Это указывает на использование предположения, что на объект можно воздействовать не только через его входной сигнал, но и каким-то иным способом. Такое рассмотрение не оправдано. Все возможные виды воздействий на объект целесообразно привести к форме управляющих сигналов, и все их формирует регулятор.
Если для управления одной выходной величиной имеется возможность воздействовать на объект не по одному каналу управления, а по нескольким, это следует учитывать в структуре схемы, т. е. в основном контуре управления. Методы управления при избыточном числе входов рассмотрены в различной литературе, в том числе [Бугров, 2010].
В устройстве, показанном на Рис. 42 из книги [Куропаткин, 1973, с. 485], динамические характеристики определяются по корреляции выходного сигнала объекта с задержанными сигналами.
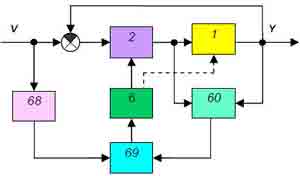
Рисунок 41 – АС из книги [Куропаткин, 1973, с. 479]: 1 – объект, 2 – регулятор, 60 – устройство оценки процесса, 68 – устройство оценки внешних сигналов, 69 – логический элемент, 70 – исполнительный элемент
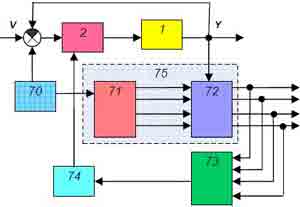
Рисунок 42 – АС по динамическим характеристикам объекта из книги [Куропаткин, 1973, с. 485]: 1 – объект, 2 – регулятор, 70 – генератор белого шума, 71 – многоканальная временная задержка, 72 – многоканальное множительное и суммирующее устройство, 73 – анализатор характеристик, 74 – устройство самонастройки, 75 – коррелятор
В этой системе генератор 70 формирует сигналы, которые должны не слишком существенно изменять значение выходного сигнала объекта. Однако их остатки в этом сигнале имеются. Этот же самый сигнал подается на множество каналов устройства 71, в каждом из которых реализуется различная задержка. Многоканальное множительное и суммирующее устройство 72 вычисляет корреляцию между задержанными сигналами и сигналом объекта; анализирующее устройство по этим значениям корреляции должно определить параметры объекта. В данной структуре, естественно, определяются параметры полной цепи, состоящей из регулятора 2 и объекта 1, но, поскольку регулятор известен, вычисление динамической модели объекта не составит труда, если известна динамическая модель полного контура, включающая регулятор и объект.
Недостатком такой системы является необходимость внесения шума в систему, т. е. необходимость искусственного ухудшения работы системы с целью определения параметров модели. Кроме того, алгоритм определения параметров модели по корреляциям не вполне ясен. Тут могут быть различные варианты, и ценность такой структуры зависит от этих конкретных решений. Также можно вместо генерации белого шума применить генератор малого по величине гармонического сигнала, частота которого перестраивается по заданной программе. В этом случае анализатор характеристик может попросту определять отдельные значения передаточной функции объекта по соотношению амплитуд и фаз сигналов этой частоты на входе и выходе объекта. В этом случае коррелятор 75 не нужен.
Структурная схема будет тогда преобразована к виду, показанному на Рис. 43.
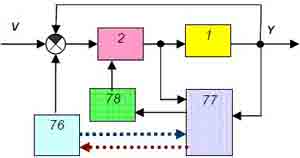
Рисунок 43 – Предлагаемая модификация АС рис. 46: 1 – объект, 2 – регулятор, 76 – генератор гармонических сигналов по заданной программе, 77 – анализатор характеристик, 78 – устройство самонастройки
В этом случае также целесообразна связь от анализатора характеристик с генератором с целью изменения амплитуды тестовых сигналов до такого значения, чтобы на выходе объекта отклик от этого воздействия оставался в отведенных допустимых пределах. Слишком большое значение такого отклика нарушит нормальную работу системы, а слишком маленькое – не позволит достоверно отделить его от шумов. Также целесообразна связь от генератора к анализатору сигнала, что позволяет знать фазу сигнала на выходе этого генератора и определять фазовый сдвиг сигнала в системе.
В адаптивной системе из книги [Антонов, 1984, с. 68] регулятор разбит на два последовательно включенных элемента: изменяемый и неизменяемый.
В литературе, например, в книге [Антонов, 1984, с. 101], встречаются структуры, содержащие АЦП для преобразования аналоговых сигналов в цифровые отсчеты, ЦАП для обратного преобразования и микроконтроллер. На современном этапе развития цифровой техники нецелесообразно приводить типовую структуру микропроцессора в функциональных схемах. Если отказаться от такой детализации, которая никак не разъясняет принципа действия адаптивной системы, большинство таких структурных схем вырождается в схему, показанную на Рис. 44. Схема, показанная на Рис. 44, не фиксирует никакого алгоритма адаптивной настройки регулятора, кроме того факта, что регулятор реализован на цифровой технике, оснащенной АЦП на входе и ЦАП на выходе. На основе такой структуры можно реализовать все рассмотренные выше виды систем.
В книге [Александровский, 1973, с. 6] приведена структурная схема системы управления с разделением темпа. По своей сути эта структура идентична структуре, показанной на Рис. 44. Важный момент, на котором заостряют внимание авторы, состоит в том, что, хотя функционирование системы происходит в реальном времени, подстройка модели осуществляется в ускоренном времени. В устройстве модель строится на основании априорных данных и постоянно подстраивается, при этом расчет оптимального регулятора может осуществляться моделированием, при котором в ускоренном времени просчитываются различные варианты управления, выбирается оптимальный вариант.
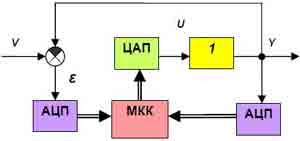
Рисунок 44 – Лаконичная структура цифровой АС: 1 – объект, МКК – микроконтроллер
За время реального протекания процесса рассчитать переходные процессы с различными моделями можно многие сотни и тысячи раз, смотря по тому, во сколько раз отличается реальное время от времени моделирования. Поэтому регулятор выбирается из большого множества проанализированных вариантов, и он далее реализуется в реальном времени. Такой подход крайне продуктивен, на его основе в дальнейшем будет строиться все больше адаптивных систем.
В класс Системы с блоком прогноза выхода объекта
можно отнести системы, в которых нежелательное влияние блока запаздывания в составе модели объекта или близкое к этому явлению резкое увеличение порядка наклона логарифмической амплитудно-частотной характеристики объекта компенсируется введением блока, осуществляющего прогноз выходного сигнала объекта.
На Рис. 45 показана схема АС из книги [Александровский, 1973, с. 15]. В этой системе модель объекта можно условно разбить на два элемента – звено запаздывания и минимально-фазовую часть. Блок, реализующий работу в соответствии с этой моделью объекта, называемый Модель объекта
, также состоит из двух частей.
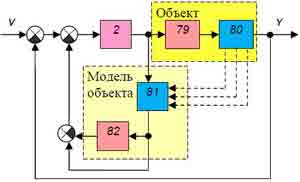
Рисунок 45 – СНС из книги [Александровский, 1973, с. 15], использование модели для компенсации вредного влияния запаздывания: 2 – регулятор, 79 – звено запаздывания в составе объекта, 80 – минимально-фазовая часть объекта, 81 – модель минимально-фазовой части объекта, 82 – модель звена запаздывания объекта
Если порядок включения этих передаточных функций в объекте несущественен (в случае линейного объекта), то в модели, используемой для формирования сигнала обратной связи, первым включается минимально-фазовое звено 82. От него замыкается отрицательная обратная связь, поэтому на регулятор приходит сигнал обратной связи с минимально-фазовой задержкой после его изменения на выходе регулятора, он поступает от этой минимально-фазовой части модели объекта. К моменту формирования отклика от реального объекта остатки выходного сигнала от модели объекта перестают быть нужными. Для их компенсации используется вычитающее устройство, на которое подается не только сигнал от минимально-фазовой части модели (на неинвертирующий вход), но и сигнал с выхода полной модели (на инвертирующий вход). Таким образом, пока отклик от изменения входного сигнала не распространился от входа объекта к его выходу вследствие задержки его на элементе 82, прогноз этого отклика формируется на элементе 81 и подменяет собой сигнал обратной связи, после того как отклик сформируется, прогноз его будет скомпенсирован откликом от полной модели. Недостатком структурной схемы, показанной на Рис. 45, является не вполне подробная проработанность сигнала обратной связи от объекта к его модели. Если предполагается идентификатор, следует его внести в функциональную схему и описать его работу. Без идентификатора такая схема неполна. Подавляющее большинство реальных объектов не обладают выходами, с которых можно было бы взять непосредственно параметры их модели.
Другим недостатком такой системы является неприменимость ее к системам, в структуре модели которых не содержится звено запаздывания в явном виде.
Нами предложена и апробирована модификация этого принципа, которая состоит в том, что регулятор охватывается отрицательной обратной связью, называемой «обводной канал» [Жмудь, Ишимцев, 2008]. Структура такой системы показана на Рис. 45. Другой вариант этой системы показан на Рис. 46. В обоих случаях обводной канал содержит последовательно включенные фильтры низких и высоких частот. Порядок их включения может изменяться, от этого принцип действия не изменится.
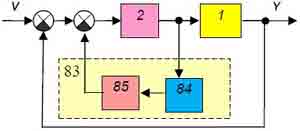
Рисунок 45 – Система с обводным каналом: 1 – объект, 2 – регулятор, 83 – обводной канал, 84 – фильтр высокихчастот, 85 – фильтр низких частот первого порядка
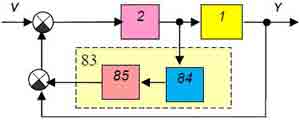
Рисунок 46 – Система с обводным каналом: 1 – объект, 2 – регулятор, 83 – обводной канал, 84 – фильтр высоких частот, 85 – фильтр низких частот первого порядка
Принцип действия системы с обводным каналом состоит в следующем. Обводной канал включен фактически параллельно объекту, что более наглядно видно на Рис. 46. Поэтому если в объекте высокочастотная часть его амплитудно-частотной характеристики затухает чрезмерно быстро, что приводит к чрезмерно быстрому спаду фазовой характеристики, то при параллельном включении объекта и обводного канала в этой области отклик формируется именно этим обводным каналом. Таким образом, объект совместно с обводным каналом является составным объектом, управление которым осуществляется крайне легко, поскольку высокочастотная часть этого составного объекта представляет собой фильтр первого порядка, в котором затухание амплитудно-частотной характеристики идет плавно. При этом к фильтру высоких частот предъявляется следующее требование: он должен обращать в малую величину передаточную функцию обводного канала в той области частот, в которой требуется эффективная работа контура управления объектом. Указанный принцип действия не требует наличия в объекте звена запаздывания и может быть применен к объекту произвольно высокого порядка. Также рассмотренный принцип может быть применен для управления многоканальным объектом.
К этому подклассу адаптивных систем отнесем системы, в которых имеется основной контур управления, исполненный на основе традиционных принципов, а также имеется контур настройки параметров регулятора методами экстремального управления на состояние экстремального качества основного контура.
На Рис. 47 показана структурная схема, реконструированная нами из описания в тексте книги [Куропаткин, 1973, с. 480–481].
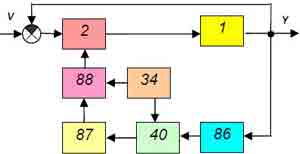
Рисунок 47 – АС из книги [Куропаткин, 1973, с. 480–481] (реконструкция из текста): 1 – объект, 2 – регулятор, 86 – устройство оценки процесса, 40 – синхронный детектор, 34 – генератор, 87 – регулятор контура адаптации, 88 – исполнительный элемент
Основной контур составлен объектом 1 и регулятором 2. Устройство 86 оценивает качество процесса, вычисляя соответствующую целевую функцию. На регулятор через исполнительный элемент 88 подается сигнал обратной связи от регулятора 87 и сигнал пробной девиации от генератора 34. Действия генератора 34 приводят к периодическим изменениям сигнала в основном контуре. Через устройство оценки процесса и синхронный детектор осуществляется детектирование близости состояния контура к оптимальной настройке. Пробное воздействие может подаваться и в качестве дополнительного сигнала, поступающего на вход объекта вместе с сигналом управления, как это сделано в схеме, показанной на Рис. 48, являющейся другим вариантом реконструкции того же описания в тексте книги [Куропаткин, 1973, с. 480–481].
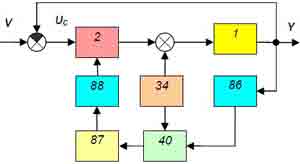
Рисунок 48 – СНС из книги [Куропаткин, 1973, с. 480–481] (реконструкция из текста): 1 – объект, 2 – регулятор, 86 – устройство оценки процесса, 40 – синхронный детектор, 34 – генератор, 87 – регулятор контура адаптации, 88 – исполнительный элемент
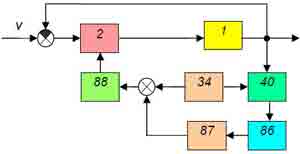
Рисунок 49 – СНС из книги [Куропаткин, 1973, с. 480–481] (реконструкция из текста): 1 – объект, 2 – регулятор, 86 – устройство оценки процесса, 40 – синхронный детектор, 34 – генератор, 87 – регулятор контура адаптации, 88 – исполнительный элемент
Третий вариант той же реконструкции показан на схеме Рис. 49. Конкретных структурных схем, не потребовавших реконструкции из текста, нами в литературе не найдено.
Рассмотрим самую общую структурную схему системы с эталонной моделью при отсутствии связи от входного сигнала, показанную на Рис. 50. Принцип действия этого устройства ясен из структуры. Однако структура и принцип действия устройства идентификации 3 и устройства автоматической настройки регулятора 4 не достаточно разъяснены. Один из вариантов реализации этих блоков показан на Рис. 51.
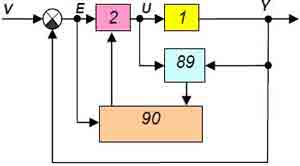
Рисунок 50 – АС с эталонной моделью: 1 – объект, 2 – управляемый регулятор, 3 – устройство автоматической идентификации объекта, 4 – устройство автоматической настройки регулятора
Система, показанная на Рис. 51, работает следующим образом. Устройство автоматической идентификации объекта одновременно реализует не одну, а несколько моделей, подключенных параллельно к выходу регулятора. Каждая из таких моделей формирует имитацию выходного сигнала объекта. Адаптирующее устройство 8 сопоставляет все эти выходные сигналы попарно с выходным сигналом реального объекта, например, вычисляя корреляционную функцию и отыскивая среди вычисленных результатов наибольший. Наибольшей корреляционной функции соответствует наибольшее соответствие данной модели реальному объекту.
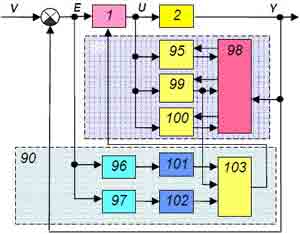
Рисунок 51 – АС с эталонной моделью: 1 – управляемый регулятор, 2 – объект, 3 – устройство автоматической идентификации объекта, 4 – устройство автоматической настройки регулятора, 95–97 – модель объекта, 98 – адаптирующее устройство, 99 – модель объекта с увеличенным коэффициентом, 10 – модель объекта с уменьшенным коэффициентом, 101 – модель регулятора с увеличенным коэффициентом, 102 – модель регулятора с уменьшенным коэффициентом, 103 – анализирующее устройство
Устройство автоматической настройки объекта может работать аналогичным образом. Оно содержит несколько моделей замкнутых систем, в каждой из которых используется наиболее близкая модель объекта и различные варианты регулятора. Как минимум реализуются два регулятора, отличающиеся одним из параметров. Анализирующее устройство вычисляет стоимостную функцию, позволяющую оценить и сопоставить качество получаемых регуляторов, и по результату сопоставления принимает решение о выборе параметров регулятора, который реализуется в реальном, а не виртуальном контуре управления.
Множество моделей, реализуемых одновременно во времени, может быть заменено одной изменяемой моделью, реализуемой последовательно, если указанное моделирование может быть осуществлено в ином, более быстром масштабе времени, как это описано в книге [Александровский, 1973, с. 16].
Рассмотрим возможную модификацию системы, показанной на Рис. 45. Объект сам по себе не предоставляет информации о параметрах его модели. Однако можно ввести в систему блок идентификации, а регулятор составить в виде двух последовательно включенных звеньев, одно из которых соответствует желаемой модели разомкнутого контура, а второе – обратной модели объекта, как показано на Рис. 52. Блок идентификации может быть реализован, например, так, как показано на Рис. 53.
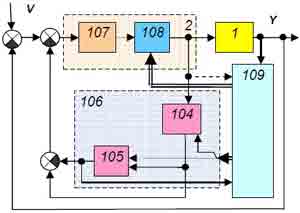
Рисунок 52 – АС с эталонной моделью: 1 – объект, 2 – регулятор, 3 – модель минимально-фазовой части объекта, 4 – модель звена запаздывания объекта, 5 – модель объекта, 6 – желаемая модель разомкнутого контура, 7 – обратная модель минимально-фазовой части модели объекта, 8 – блок идентификации
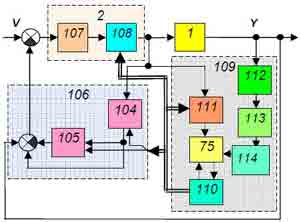
Рисунок 53 – АС с эталонной моделью: 1 – объект, 2 – регулятор, 3 – модель минимально-фазовой части объекта, 4 – модель звена запаздывания объекта, 5 – модель объекта, 6 – желаемая модель разомкнутого контура, 7 – обратная модель минимально-фазовой части модели объекта, 8 – блок идентификации, 75 – коррелятор, 110 – блок оптимальной настройки, 111 – управляемая модель объекта в составе блока идентификации, 112 – АЦП, 113 – запоминающее устройство, 114 – блок воспроизведения записанного сигнала
Принцип действия блока идентификации в системе Рис. 53 основан на отыскании экстремума корреляционной функции между выходным сигналом реального объекта и выходным сигналом модели.
Для многократного сравнения сигнала с выхода реального объекта с сигналом, получаемым на выходе модели при ее различных значениях, в блоке идентификации имеется АЦП, запоминающее устройство и блок воспроизведения записанного сигнала. На Рис. 54 показана предложенная авторами система с девиацией коэффициента усиления регулятора [Бугров, Лисовой, 2010].
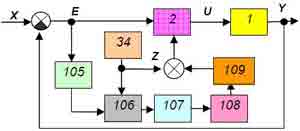
Рисунок 54 – АС с девиацией коэффициента усиления регулятора: 1 – объект; 2 – управляемый усилитель; 34 – генератор; 105 – устройство оценки качества системы; 106 – синхронный детектор; 107 – интегратор; 108 – нелинейный элемент; 109 – регулятор коэффициента
Эта система работает следующим образом. При исходных фиксированных параметрах объекта 2 управляемый усилитель 1 в качестве регулятора и обратная связь вместе с объектом образуют обычную систему автоматического управления. Управляемый усилитель 1 служит регулятором в основном контуре и обеспечивает требуемые точность и быстродействие этого контура, пока параметры объекта 2 остаются неизменными. В случае достаточно эффективной работы основного контура выходной сигнал объекта Y равен входному сигналу системы X, поэтому сигнал ошибки E на выходе вычитающего устройства равен нулю или пренебрежимо малой величине. Эта величина анализируется трактом, состоящим из устройства оценки качества системы 105, синхронного детектора 106, интегратора 107, нелинейного элемента 108, регулятора 109 и сумматора. Поскольку в тракте присутствует нелинейный элемент типа зона нечувствительности
или аналогичного вида, выходной сигнал которого равен нулю, если входной сигнал лежит в заранее заданном небольшом диапазоне вблизи нуля, то на вход регулятора 109 подается также нулевой сигнал, поэтому регулятор 109 не воздействует на управляемый регулятор 1 и этот усилитель изменяет свой коэффициент усиления. Генератор 34 формирует гармонический сигнал, который поступает на вход синхронного детектора 34 и на вход сумматора. Выходной сигнал синхронного детектора, равный произведению его входных сигналов, в данном случае остается нулевым. Действие сигнала с выхода генератора 34, подаваемого на вход сумматора, состоит в том, что коэффициент усиления регулируемого усилителя 1 изменяется на небольшую добавочную величину, изменяющуюся по этому гармоническому закону. Такое небольшое изменение коэффициента усиления практически не влияет на действе основного контура управления. Путем моделирования нами показано, что в некоторых случаях подобная модуляция коэффициента усиления регулятора даже оказывает стабилизирующее влияние на устойчивость системы автоматического регулирования.
В качестве устройства оценки качества системы может быть использован выпрямитель. В качестве синхронного детектора используется множитель сигналов с последовательно включенным фильтром низких частот. В качестве нелинейного элемента применяется элемент типа зона нечувствительности
. В качестве регулятора может быть взят интегратор или пропорционально-интегральный регулятор.
Интегратор 107 может быть выполнен как вычислитель скользящего среднего, т. е. устройство, вычисляющее интеграл в скользящих пределах от t – T до t, где t – текущее время, T – интервал времени усреднения. Это устройство может быть реализовано, в частности, в виде вычитающего устройства с двумя интеграторами на входах, причем один из этих двух интеграторов включатся с задержкой на время T по сравнению с другим интегратором. Вся система полностью или частично может быть реализована на цифровой электронной технике, например, на базе цифрового сигнального процессора.
В результате рассмотренных примеров можно выбрать структуру адаптивного регулятора в зависимости от особенностей объекта и требований к системе. Предложенные новые структуры успешно опробованы моделированием и реализацией в системах для научных исследований и промышленности.