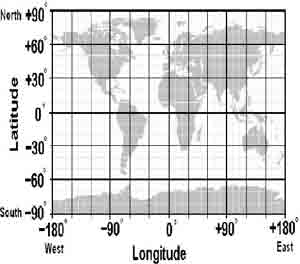
Рисунок 1(а) – Широта и долгота – это то, как определяется местоположение поверхности на поверхности Земли
Авторы
Mahendra Chahar, Manish Chandak,Manoj Malav, Mohit Sardiwal and Mohd Imran
Источник: http://www.iaeme.com/IJEET/issues.asp?JType=IJEET&VType=7&IType=2
В данной статье микроконтроллер PIC был применён, чтобы разработать систему позиционирования спутниковой антенны, которая может управляться при помощи дистанционного управления. Основная точка использования тарелки должна получить сигнал от спутников и другой широковещательной передачи источника. Чтобы получить точный угол позиции тарелки, нужно скорректировать его вручную. Данная статья помогает в регулировании положения тарелки посредством дистанционного управления, чтобы преодолеть трудность корректировки вручную. Дистанционное управление действует как передатчик, данные которого получены приёмником ИК-пульта с которым присоединяют интерфейс к микроконтроллеру PIC 16F877 А. Дистанционное управление отправляет кодированные данные получателю, тогда вывод, которого отправлен в микроконтроллер.
В геосинхронной орбите есть много коммерческих спутников связи. Геостационарные спутники расположены в орбите непосредственно выше экватора и остаются в том же самом месте в небе, так как они обходят землю на той же самой угловой скорости, как и вращается Земля. Местоположение спутника, таким образом, может быть определено только долготой. Положение Орбиты Geo – положение долготы вокруг геостационарной орбиты. Все путники приблизительно расположены в небе выше экватора. Отрицательная орбита числа положения – градусы на запад из Гринвичского меридиана. Положительные числа градусов на восток. Использование Восточной и Западной долготы популярно для общественного использования начиная с меньшего числа. Использование градусов на восток только (0 к +360o, идущий на Восток из Гринвича), однако, так как спутники обходят этот путь и это имеет смысл для чисел продолжать увеличиваться, если спутник перемещается вперед. Пытаясь сделать вычисления орбиты достаточно плохи, не имея чисел, которые держат переключающиеся вперёд и назад.
Многие спутниковые операторы также используют 0 для метода на +360 градусов, но может дополнительно предоставить градус на запад
(примечание для некоторых публикаций продукции).
Воображаемые линии, также названные меридианами, проведены вертикально во всем мире. В отличие от этого, линии широты не параллельны. Меридианы встречаются на полюсах и являются самыми широкими, обособленно в экватор. Нулевую долготу степеней (0o) называют главным меридианом. Степень долгота проведена в 180o к востоку и в 180o к западу от главного меридиана (рисунке 1(а)). В этом документе микроконтроллер используется, чтобы вести двигатель постоянного тока спутниковой антенны с точки зрения направления (Восток и Запад).
Микроконтроллер используется там, где требуется управление системой для определения точной позиции двигателя. Микроконтроллер так же важен как контроль автоматизированной системы. Дистанционное управление используется, чтобы управлять сигналами к микроконтроллеру (пользователь), чтобы управлять двигателем постоянного тока тарелки расположения спутника. Основное преимущество – микроконтроллер должен также управлять обратной связью позиции. У микроконтроллера может быть команда, чтобы переместиться точно в определенную позицию. Спутниковая антенна требует точности. В данной статье микроконтроллер PIC 16F877 А был выбран, чтобы управлять системой спутниковой антенны. Преимущества микроконтроллера PIC 16F877 А – низкая стоимость, высокая производительность RISC (Компьютер с Уменьшенным Набором Инструкций) есть много портов ввода/вывода, таймеры, память и коммуникационные порты. Таким образом, это подходит для управления фактической позицией системы. Система может определить местоположение тарелки спутникового ресивера в пяти различных позиций.
Наиболее распространенная проблема, с которой любой столкнется при выравнивании тарелки это то, что они требуют выравнивание на правильный спутник для широковещательных сообщений. Спутниковые ресиверы делают определенные сведения относительно спутников, но они не могут определить выровнена ли антенна к корректному спутнику. Они полагаются на пользователя, чтобы выровнять тарелку в корректном направлении. Есть определенные детали, которые необходимы, чтобы успешно выровнять спутниковую антенну точно к корректному спутнику для потребления, они упомянуты ниже и как показано на рисунке 1(б).
Азимут: Это будет заголовком, требуемым для тарелки. Спутник, который является широковещательной передачей сигнала, будет ориентир, к которому должна быть выравнена тарелка (например, Astra 2A, B или D установлен в 28.2o к востоку от Истинного Юга).
Элевация: Это угол возвышения тарелки, который должен быть выше ориентира указывающего на спутник, к которому прикреплён курс. Так как Земля представляет собой кривую, нужно найти правильную высоту для области, где будет расположена тарелка.
LNB Уклон или Склонность: это угол LNB на его оси. То же самое, что и с высотой, нужно найти правильный угол склонности или уклона для области, где будет расположена тарелка.
Управление позиционированием спутниковых антенн с помощью двигателя постоянного тока используя ИК-пульт дистанционного управления
Рисунок 1(а) – Широта и долгота – это то, как определяется местоположение поверхности на поверхности Земли
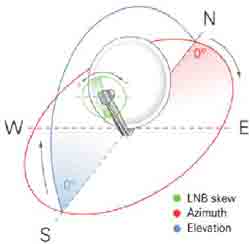
Рисунок 1(б) – Выравнивание тарелки
Система управления спутниковой антенной состоит из оборудования тарелки, используемой для его перемещения и программное обеспечение, написанное для управления этим движением. Эта система состоит из: аппаратных компонентов, удаленный контроллер, микроконтроллер PIC, релейный драйвер и сервомеханизм на основе двигателя постоянного тока. Пользователь вводит команду, такую как положение спутниковой антенны; создаётся позиция, а затем управление вызывает программное обеспечение. Программное обеспечение контроллера определит желаемое положение тарелки и отправит команду на двигатель через микроконтроллер. Пульт дистанционного управления отправляет команду 12 бит информации.
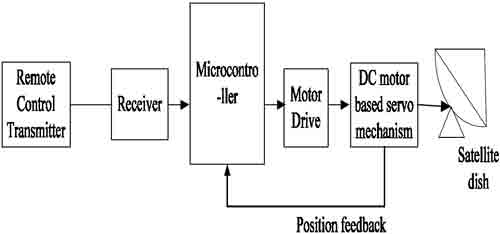
Рисунок 2 – Блок-диаграмма системы
Во-первых, двигатель достигает какой-то степени при включении питания. Эта степень называется последней степенью. Если переключатель настройки нажат, чтобы сохранить степень и счетчик мотора спутниковой антенны, то двигатель перейдет к самому нижнему пределу от текущей степени. Достигнув минимального предела, двигатель остановится. Получается нулевая степень и нулевой отсчет. Тогда двигатель пойдет на самый высокий предел. Достигнув наивысшего уровня, предела, двигатель остановится. И тогда максимальная степень сохраняется в микроконтроллер. Таким образом, получают максимальную степень и максимальное количество. Микроконтроллер рассчитал разрешение и сохранил градусы и импульсы в EEPROM. Когда степень управления от пульта дистанционного управления подается на микроконтроллер PIC, двигатель управляется. Двигатель движется со счетами. Эти подсчеты ощущаются датчиком с герконом. Сигнал обратной связи датчика с герконом привода двигателя к микроконтроллеру. Микроконтроллер увеличивает счетчики, если степень команды больше, чем последняя степень. Увеличивая количество отсчетов, двигатель будет остановлен микроконтроллером, когда степень команды равна последней степени. Сходство, микроконтроллер уменьшает количество отсчетов, если степень команды меньше, чем последняя степень. Уменьшая количество отсчетов, двигатель будет остановлен микроконтроллером, когда степень команды равна последней степени.
А. Инфракрасное устройство дистанционного управления
ИК-пульт дистанционного управления состоит из инфракрасного передатчика дистанционного управления и инфракрасного приемника дистанционного управления. Была создана структурная схема удаленного передатчика интегральной схемы ИС1 в качестве основного элемента; матричная схема для передатчика клавиатуры состоит из матричных коммутаторов, которые представляют собой входную схему клавиатурной команды с импульсным генератором в ИС1 и сигналом энкодера с клавиатуры. Удаленный приемник был составлен с помощью установленной ИС2 встроенной микросхемы с фотодиодом. Когда инфракрасный свет с пульта дистанционного управления будет получен со светочувствительной трубки приемника, тогда с помощью светочувствительной трубки световой сигнал преобразуется как электрический сигнал.
Б. Описание сигналов ИК-передатчика и приемника
Модуль ИК-датчика принимает ИК-импульсы, отправленные на пульт дистанционного управления, и преобразует его в соответствующие электрические импульсы. Эти электрические импульсы передаются микроконтроллеру, который декодирует его в соответствующий байт данных с использованием детектора пересечения нуля, таймера микросхемы и прерывание. Эти байты данных используются для принятия дальнейших управленческих решений. Выходные сигналы подаются на схему возбуждения, которая управляет двигателем постоянного тока спутниковой тарелки.
В этой статье используется передатчик дистанционного управления Sony. Пульт дистанционного управления Sony основан на схеме кодировании сигнала Pulse-Width. Код состоит из 12 бит, отправленных на несущую волну 40 кГц. Код начинается с заголовка 2.4 миллисекунд (мс) или 4 раза T, где T составляет 600 микросекунд (мкс). За заголовком следуют 7 командных бит и 5 битов адреса, как показано на рисунке 4. Адреса и команды могут быть логические и нули. Логические формируются пространством 600 мкс или 1Т и импульсом 1200 мкс или 2Т. Логический нуль формируется пространством 600 мкс и импульсом 600 мкс. Пространство между 2 переданными кодами при нажатии кнопки 40 мс. Сначала передаются менее значащие биты. Общая длина битового потока всегда равна 45 мс.
В. Микроконтроллер PIC
Существует много различных разновидностей PIC. Некоторые из них – ОП (одноразово-программируемая) и некоторые из них – устройства типа Flash. ОП-устройства не подходят для любителей электроники, потому что их код программного обеспечения уже запрограммирован. Устройства типа Flash повторно перепрограммируются в цепи. Есть обычно три типа микроконтроллера устройства типа Flash. Это PIC 16F84A, 18 контактный микроконтроллер, PIC 16F628A, 18 контактный микроконтроллер и PIC 16F877A, 40 контактный микроконтроллер. Микроконтроллер PIC 16F877A имеет встроенный АЦП (аналого-цифровой преобразователь), УСАПП (универсальный синхронный и асинхронный приемный передатчик), ШИМ (широтно-импульсная модуляция), больше портов ввода/вывода и больше пространства программной памяти. Из-за его возможностей он был выбран в этой статье.
Г. Сервомеханизм на основе электродвигателей постоянного тока
В настоящее время самым популярным двигателем является сервомотор, который используется для контроля и управления, применяемый при большой нагрузке. С другой стороны, стоимость серводвигателя очень высока для этого производства. Таким образом, для этой системы выбирается сервомеханизм YURI 518R. Общий вид сервомеханизма YURI 518R показан на рисунке 5. Он поддерживает приведение в движение более 250 кг груза, когда он приводится в действие только двигателем постоянного тока 36 В. На рисунке 3(б) показаны механизм состоит из верхнего и нижнего концевого выключателя. Этот конечный выключатель защищает механизм от повреждений экстремального привода и внутреннего магнитного на основной оси геркона. Обратная связь геркона 7 импульсов за поворот и всего 873 импульса для всего движения внутреннего стержня.

Рисунок 3(б) – Сервомеханизм YURI 518R
ДАТЧИК МАГНИТНОГО ГЕРКОНА
Датчик геркона – это устройство, которое построено с использованием герконного переключателя с дополнительной функциональностью как способность выдерживать более высокий удар, более легкий монтаж, дополнительные интеллектуальные схемы, и т. д. Когда магнитная сила создается параллельно геркону, носителей магнитного потока в магнитных полюсах, которые атакуют друг друга. Если магнитная сила между полюсами достаточно сильна, чтобы преодолеть восстановительную силу геркона, тогда цепь будет собрана вместе. Геркон находится в закрытой стеклянной капсуле, как правило, со специальным вставным газом, который предотвращает окисление переключающих контактов (ржавчина). Когда магнит находится на определенном расстоянии, лезвия геркона становятся противоположными магнитным полюсам и притягиваются. Это закрывает цепь и позволяет потоку течь. Когда магнит убирают, геркон теряет свои индуцированные магнитные и отдельные лезвия, тем самым открывая цепь. Поскольку переключатель закрыт, его можно использовать в суровой окружающей среде. Герконовые переключатели реагируют на оба магнитных полюса (север и юг).
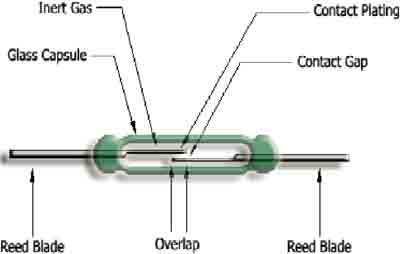
Рисунок 4 – Датчик геркона
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ОСУЩЕСТВЛЯЕМОЙ СИСТЕМЫ
Эта система использовала дистанционное управление для устройства ввода и ЖК-модуля для устройства вывода для взаимодействия с пользователем. Кроме того, другие два разных светодиода используются для обозначения движения и направления двигателя. Электродвигатель постоянного тока приводится в действие двумя электромагнитными реле с усилением транзисторов. Обратная связь по положению достигается за счет использования геркона с помощью оптопары.
А. Эксплуатация двигателя
Микроконтроллер используется для управления двигателем по часовой стрелке, когда степень команды больше, чем последняя степень и против часовой стрелки, когда степень команды меньше последних градусов (рисунке 4, 7). И он используется для управления двигателем с требуемой степенью, вычислив степень команды от пульта и степень обратной связи от датчика геркона.
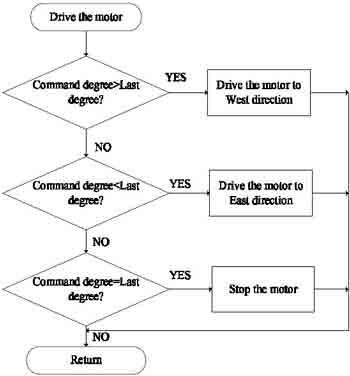
Рисунок 5 – Блок-схема работы двигателя
Б. Блок-схема системы
Обзор системы позиционирования спутниковой антенны показан на рисунке 8. После портов и регистрации инициализации, программа проверяет, установлен ли переключатель настройки (нажат или нет). Это означает, что если переключатель настроек нажат, программа войдет в установленный режим и отобразит установленное меню. С другой стороны, если не нажата настройка переключателя, программа войдет в режим поиска, чтобы получить желаемую степень. Режим настройки используется для сохранения градусов и количества оборотов двигателя. Таким образом, пользователь может выбрать один из двух режимов: установки режима и режима поиска. Фактическое положение спутниковой антенна сохраняется в EEPROM для снижения системных ошибок при отказе подачи питания.
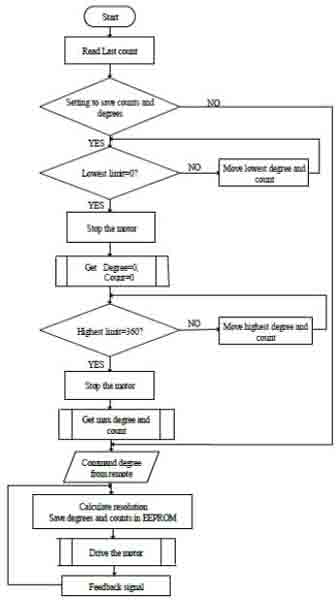
Рисунок 8 – Блок-схема системы
А. Результат поворота на восток двигателя
Эта схема состоит из ИК-пульта дистанционного управления, двигателя постоянного тока и ЖК-дисплея для операций с двигателем. Двигатель постоянного тока используется для управления спутниковой антенной. Микроконтроллер используется для привода двигателя постоянного тока. ЖК-модуль используется для отображения градусов и восточного направления двигателя постоянного тока тарелки. И ИК-приемник используется для приема сигналов от пульта управления.
Б. Результат поворота двигателя в западном направлении
Устройства, состоящие из этой схемы, управляют инструкциями программы в соответствии с командами пользователя. В этой схеме ЖК-дисплей отображает степень и западное направление электродвигателя постоянного тока спутниковой антенны.
В. Результат вращения двигателя для остановки положения
Двигатель постоянного тока предназначен для управления спутниковой антенной и приема сигналов от спутников связи. Микроконтроллер рассчитывает сигналы между степенью управления с ИК-пульта дистанционного управления и последней степенью в EEPROM. ЖК-модуль отображает положение останова двигателя в этой цепи.
Этот документ предназначен для управления спутниковой антенной в положении выбранного канала. Сначала система отображает меню позиционирования спутниковой антенны и ждет пользователя, чтобы ввести желаемый канал через дистанционное управление. Когда выбран желаемый канал, программа сначала рассчитала, какое направление необходимо для управления. И ток нагрузки от ЖК-дисплея отображаемый EEPROM. Тарелка управляется поисковой подпрограммой подачи и вычисление по подпрограмме сигнала обратной связи. Направление движения тарелки обозначается двумя светодиодами. Если направление вперед то будет указывать зеленый светодиод, и в противоположном направлении отобразится красный светодиод. Как только достигнута позиция управления, так программа остановит двигатель, а два светодиода выключатся. В этой статье геркон используется для отправки сигнала обратной связи на микроконтроллер, что спутниковая антенна находится в желаемом положении или нет. Если датчик не подключен, система зависает, и пользователь должен перезагрузить систему. А также микроконтроллер не может подключать двигатель напрямую, поскольку он не может обеспечить достаточный ток для управления двигателем. Таким образом, в этой системе схема драйвера двигателя сконструирована с двумя реле в качестве переключателей, которые используются для привода двигателя по часовой стрелке и против часовой стрелки. Система позиционирования спутниковой антенны может быть снабжена компьютерной системой без микроконтроллера. Но микроконтроллер – это единственный чип, у которого низкая стоимость, малый размер и высокая производительность. Таким образом, микроконтроллер наиболее подходит для автоматической системы позиционирования. В этой системе была разработана спутниковая система позиционирования. Система управления спутниковой антенной имеет решающее значение для её возможности отслеживания. Спутники управляются антенной наземной станцией, которая посылает команды и получает информацию от спутников. Эта система используется, для дистанционного управления, запустив двигатель в нужном направлении. Микроконтроллеры PIC широко используются во всем мире, и он основан на новейших технологиях. Использование пульта дистанционного управления улучшает передовые технологии. И использование микроконтроллера развивает двигатель для поддержания желаемого положения. Хотя это первый приближающий шаг к системам управления, систем автоматизации и робототехники, они могут в значительной степени служить контролю промышленности.
List of Satellite in Geostationary Orbit.
Creating a Control and Operating System For Monitoring and Observing Space(COSMOS).
Microcontroller Based IR Remote Control Signal Decoder for Home Application.
Industrial Electronics and Control, New Delhi: Tata Mc Graw-Hill Publishing Company Limited.
Motor Control Electronics Handbook, Mc Graw-Hill, Boston.